
反鱼雷鱼雷末制导捕获概率建模与仿真
2015-10-24 06:27萧丛杉杨惠珍
水下无人系统学报 2015年6期
萧丛杉, 杨惠珍
(1. 西北工业大学 航海学院, 陕西 西安, 710072; 2. 水下信息与控制重点实验室, 陕西 西安, 710075)
反鱼雷鱼雷末制导捕获概率建模与仿真
萧丛杉1,2,杨惠珍1,2
(1. 西北工业大学 航海学院, 陕西 西安, 710072; 2. 水下信息与控制重点实验室, 陕西 西安, 710075)
建立了一种反鱼雷鱼雷(ATT)末制导捕获概率数学模型。通过分析末制导交班时刻ATT和来袭鱼雷的位置误差,将捕获概率问题描述成一个二重概率密度函数在导引头自导扇面内的积分问题,对积分区域进行近似化简,得到了一个与位置误差、自导作用距离、雷目距离和自导扇面角4个变量有关的ATT捕获概率解析表达式。最后通过仿真定量分析了上述4个变量对ATT捕获概率的影响。
反鱼雷鱼雷; 末制导; 捕获概率; 概率积分
0 引言
反鱼雷鱼雷(anti-torpedo torpedo, ATT)作为主动防御型硬杀伤武器, 已成为当前各国海军研究和发展的重点武器之一。由于目标来袭鱼雷具有速度快、体积小、机动性强等特点, ATT与来袭鱼雷对抗时间短, 从而要求ATT全弹道精确导引和一次性攻击成功, 没有机会进行再搜索[1]。因此, ATT的末制导捕获概率分析是ATT弹道设计和作战效能分析的一个重要课题。
ATT的捕获概率是指ATT拦截目标过程中,来袭目标落在导引头最大导引距离和自导扇面范围内的概率[2]。ATT对目标的捕获概率和发射艇的目标探测精度、ATT导引头探测精度以及目标特性等密切相关。
目前, 关于捕获概率问题的研究大多集中在导弹及反导系统领域, 主要的研究方法大多是将末制导雷达覆盖目标的概率近似为导弹对目标的捕获概率, 通过分析雷达搜索区和导弹能捕获目标的自控终点散布区域来建立捕获概率的计算模型。文献[3]给出了目标散布区域的数学表达式,计算了单枚和多枚导弹的捕获概率。文献[4]对自控终点误差、目标散布、现在点射击方式进行了综合讨论。通过计算搜索扇面与目标散布区域的相交面积和整个目标散布区面积之比来计算捕获概率, 文献[5]将判断目标被捕获的问题转换为判断导弹自控终点分布问题, 建立了基于自控终点误差模型的捕获概率计算方法。文献[6]利用蒙特卡洛法计算自控终点导弹的位置捕获概率。文献[7]将导弹扇面搜索区简化为矩形区, 对纯方位发射导弹的侧向捕获概率进行讨论。文献[8]在文献[7]的基础上, 采用解析几何分析法, 综合考虑目标方位误差, 给出纯方位发射导弹的捕获概率的计算模型。文献[9]分析了导弹系统的误差源及特性和导引头动态视场, 在此基础进行捕获概率的计算。文献[10]综合考虑拦截器和目标散布误差, 建立捕获概率的解析表达式, 并将捕获概率问题转化为求解三重概率积分的数学问题, 给出了明确的概率积分计算公式、积分区域表达式以及概率积分的具体解析过程。
关于鱼雷和反鱼雷鱼雷的捕获概率问题的相关研究还比较少, 多数文献采用蒙特卡洛法来计算捕获概率值, 这类方法虽然克服了武器系统复杂、涉及因素众多等难题, 易于实现, 但同样存在计算量大、不易掌握规律, 难以形成理论体系等缺点。文献[11]建立了蛇形搜索下双雷齐射攻击与互导的数学模型, 利用蒙特卡洛法分别计算了不同主航向间距下的单雷攻击和齐射攻击的捕获概率。文献[12]对网络鱼雷和复合搜索面进行了研究, 设计了网络系统的组成方案并对其进行效能分析, 分别给出了网络鱼雷和非网络鱼雷的捕获概率公式并对其计算结果进行了对比。文献[13]着重分析了火箭助飞鱼雷的搜索域、鱼雷落点散布和目标散布3个因素, 构建了前置点射击和现在点射击2种方式下, 火箭助飞鱼雷水平面捕获概率的数学解析模型。但没有考虑末制导时鱼雷自导头的有限捕获范围问题。文献[14]利用蒙特卡洛法进行仿真, 讨论了不同敌舷角范围内自导作用距离的不确定性对主动声自导鱼雷捕获概率的影响。文献[2]使用蒙特卡洛法对声自导鱼雷的捕获概率进行了仿真分析。文献[15]指出了传统捕获概率计算方法的局限性, 在分析目标和鱼雷误差散布的基础上, 通过等概率分隔各参数误差的方法计算主动自导鱼雷多次连续捕获概率,其计算精度受到误差等概率分隔数影响较大。
文中结合反鱼雷鱼雷的实际情况, 研究ATT的末制导捕获概率建模问题, 首先给出了ATT末制导捕获概率的定义, 将捕获概率问题描述成一个二重概率密度函数在导引扇面内的积分问题,然后利用近似积分区域的方法建立了ATT捕获概率的解析表达式, 基于该解析模型, 利用计算机仿真分析了ATT自导头最大捕获距离、自导扇面角、雷目位置误差和雷目距离对ATT捕获概率的影响。
1 捕获概率的数学描述
如图1所示, 考虑地面坐标系水平面O0x0z0内的情况, ATT和来袭鱼雷的位置散布均服从正态分布, 假设ATT分布中心的位置为(xT0,zT0),用矢量rT0表示, 位置误差协方差矩阵为PT; 目标来袭鱼雷分布中心的位置为rM0=(xM0,zM0),位置误差协方差矩阵为PM。因此, ATT位置矢量rT和目标位置矢量rM的概率密度函数分别表示为
要使导引头发现目标, 则目标需进入导引头有效作用范围内, 即目标要落入自导扇面中。鱼雷导引头安装在头部, 声轴方向与雷体纵轴重合,因此, 导引头能否捕获到目标取决于下面2个条件: 1) 雷目距离小于或等于自导头最大作用距离;2) 自导头声轴与目标视线(light of sight, LOS)的夹角ε小于二分之一自导扇面角。因此, ATT的捕获概率P可以表示为

图1 反鱼雷鱼雷(ATT)捕获目标的条件Fig. 1 Conditions of target acquisition for an anti-torpedo torpedo(ATT)


图2 ATT和目标位置误差分布Fig. 2 Position error distribution between ATT and target
由上式可知, ATT捕获概率描述成ATT与目标的相对位置矢量满足一定条件的概率, 通过在一定范围内对相对位置矢量的概率密度函数进行积分即可计算出此概率。
假设ATT的位置矢量和目标位置矢量相互独立, 则相对位置矢量r的概率密度函数可以表示为

式中: r0为相对位置矢量的均值矢量; P为协方差矩阵, 有

因此, 捕获概率cP可以表示成相对位置矢量r的概率密度函数的二重积分

捕获概率的计算问题就转化为一个数学问题:求协方差矩阵为P、均值向量为r0的二维正态随机向量r与常向量r0间夹角小于λ/2, 且r的长度小于Lmax的概率。如图3所示, 满足上面条件的矢量r的全体构成一个以r0为中线, λ/2为半角, Lmax为半径的扇面, 捕获概率cP就是随机矢量r落在该扇形内的概率。
图3 联合误差椭圆和扇面Fig. 3 Combined error ellipse and sector
2 捕获概率计算
为了便于概率计算, 定义一种新的目标视线坐标系O-xszs, 原点O位于ATT分布中心, Oxs轴由ATT分布中心指向目标来袭鱼雷分布中心, 即视线r0方向, Ozs轴在由地心、ATT分布中心和
2.1视线坐标系中的捕获概率目标来袭鱼雷分布中心构成的平面内垂直于Oxs轴, 指向左为正(从ATT尾部观察), 如图4所示。
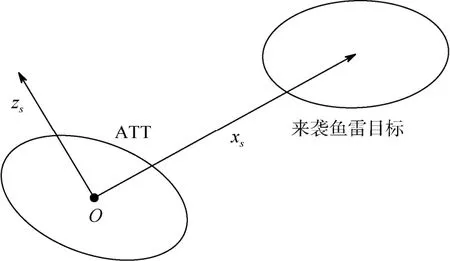
图4 新定义的视线坐标系SFig. 4 A newly defined sight coordinates S
设视线坐标系S的两坐标轴单位矢量分别为
地面系到视线坐标系S的坐标转移矩阵为

通过上面的坐标转移矩阵, 可以将地面坐标系中的r0及P在S中表示为

从视线坐标系定义可知, 矢量r0s的zs分量为零, 可以写为

积分区域是以Lmax为半径, λ/2为半扇面角,扇面角的角平分线落在Oxs轴上的 一个扇面, 如图5所示。
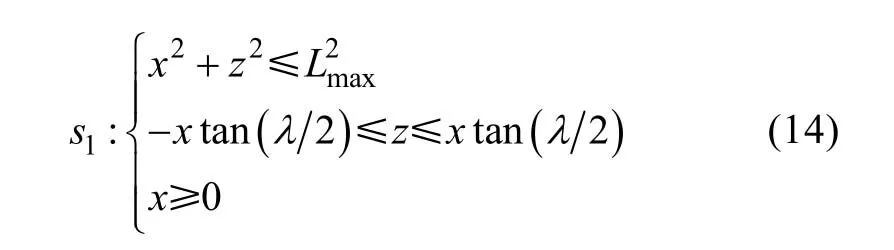
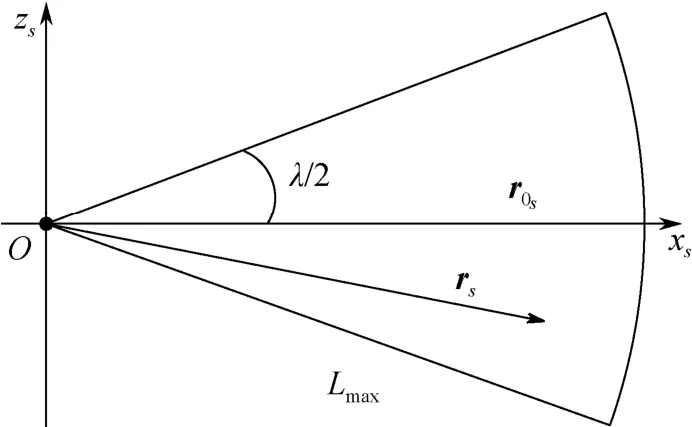
图5 捕获概率积分区域表示Fig. 5 Integration area of acquisition probability
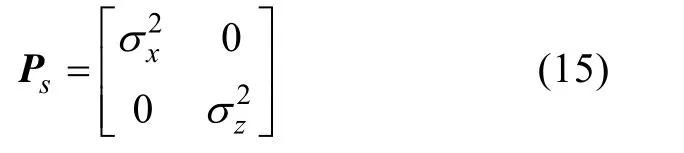
为便于捕获概率的计算, 有必要假设视线坐标系中xs视线方向的位置误差与zs方向的位置误差不相关, 即联合误差协方差矩阵Ps为对角矩阵
则捕获概率可写成下式

在实际情况中, 可以通过坐标旋转将协方差矩阵转换成对角阵[10]。
2.2积分区域近似
由图6可见, 积分区域扇形的自导扇面角较小, 而最大捕获距离较长, 因此, 在计算cP时,可以把积分区域近似为一矩形区域
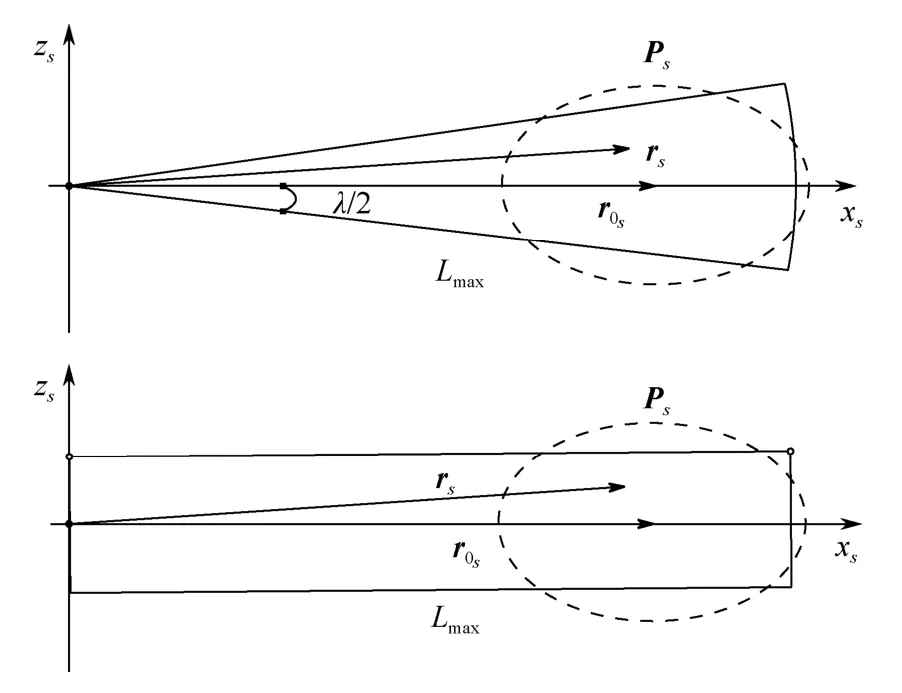
图6 用矩形近似扇形积分区域示意图Fig. 6 Schematic of approximating sectorial integration area to rectangular one

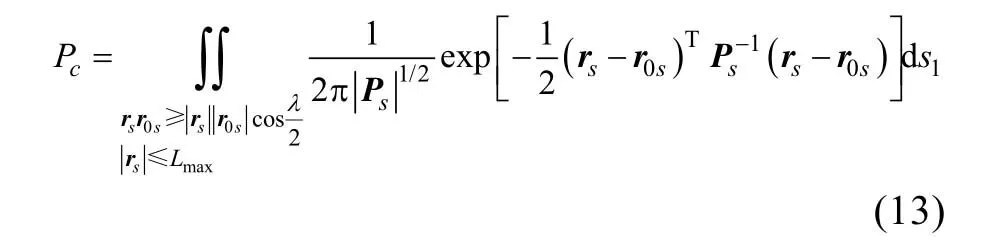
由于视线坐标系中xs方向的位置误差与zs方向位置误差不相关, 捕获概率可以表示为

其中
式中: Φ表示标准正态的分布函数。
将式(19)和式(20)代入式(18), 可得捕获概率
3 仿真结果与分析
式(16)是捕获概率的积分表达式, 式(21)是捕获概率的近似表达式。在仿真过程中, 对式(16)的求解需要采用数值积分的方法, 而式(21)只需将各参数代入公式中计算即可得到捕获概率的近似解。
3.1积分区域近似算法精度
把利用数值积分计算的式(16)的值作为真实值, 与式(21)的计算结果进行对比可以分析积分区域近似算法的精度。
这说明将积分区域近似时, 引入的误差不大,在工程实际中进行区域近似是可行的。
3.2捕获概率的影响因素
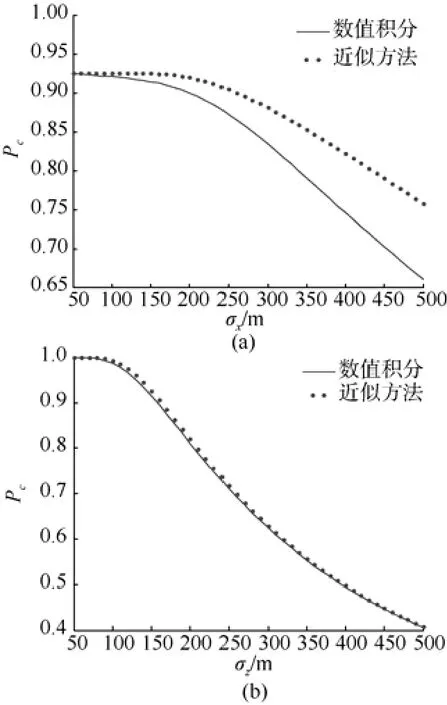
图7 积分近似结果和精确计算结果对比Fig. 7 Comparison between approximate integration results and accurate ones
由捕获概率的表达式(21)可以看出, 影响捕获概率的因素主要有以下4个: 1) ATT与来袭鱼雷分布中心间的距离x0; 2) ATT导引头最大自导作用距离Lmax; 3) ATT导引头自导扇面角λ; 4) ATT制导精度和目标探测精度。
下面分析上述四因素对捕获概率的影响。仿真参数设为λ=30°,Lmax=1500 m , σx=σz=150 m ,改变x0的取值, 分析弹目距离对捕获概率的影响。
图8为捕获概率Pc随弹目距离x0的变化曲线, 由图可以看出, 捕获概率Pc随着弹目距离x0的增大, 先增大, 在达到极大值后开始急速下降至0。当距离x0从0增大到1 148 m时, Pc从0增大到最大值0.95, 当x0再增大时, Pc则迅速下降到0, 这是由于来袭目标鱼雷超出了ATT的最大捕获距离而无法捕获造成的。
仿真参数设为λ=30°,x0=1000m, σx=σz=150 m。改变Lmax的取值, 分析最大自导作用距离对捕获概率的影响。
图9为捕获概率Pc随着Lmax的变化曲线。由图可以看出, 当Lmax<550 m时, 捕获概率接近于0, 当Lmax>1450 m 时, 最大自导作用距离对捕获概率几乎没有影响, 这也符合误差理论中的3σ法则, 即有效捕获距离几乎全部落在x0±3σx内。仿真参数设为Lmax=1500 m , x0=1000 m ,σx=σz=150 m 。改变λ的取值, 分析自导扇面角对捕获概率的影响。
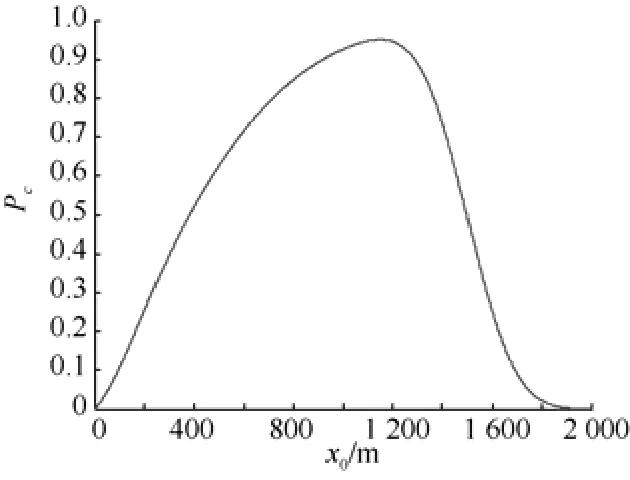
图8 捕获概率随雷目距离的变化曲线Fig. 8 Curve of acquisition probability versus distance from ATT to target
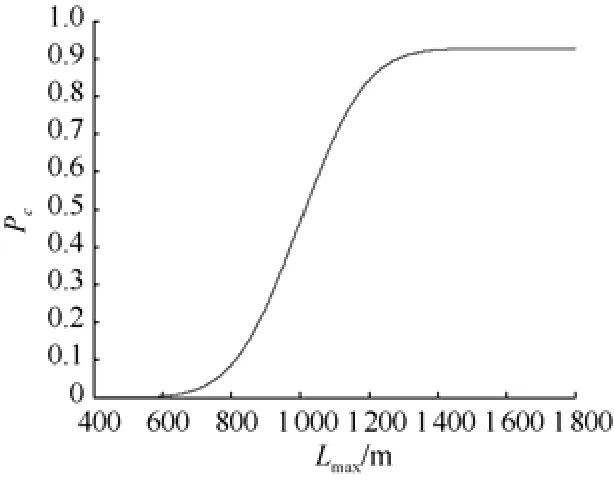
图9 捕获概率随ATT自导头的最大作用距离变化曲线Fig. 9 Curve of acquisition probability versus maximum operating range of homing head
图10是捕获概率Pc随自导扇面角λ的变化曲线, 由图可以看出, 捕获概率Pc随λ的增大而增大, 当λ>35°时捕获概率已接近1。
图11是σx=150 m时捕获概率Pc随σz的变化曲线, 由图可看出, 当σz>1600 m时捕获概率Pc已经接近于0。图12是σz=150 m时捕获概率Pc随σx的变化曲线, 由图可看出, 当σx>5 000 m 时捕获概率Pc才接近于0。
这说明捕获概率Pc随着位置误差的增大而减小, 但是随着不同方向位置误差增大而减小的幅度不同。其中, 视线方向的位置误差σx对捕获概率的影响较小, 而垂直于视线方向的位置误差σz对捕获概率的影响较大。在实际拦截中, 可以考虑把位置误差最大的方向作为视线方向以降低误差对捕获概率的影响。
图10 捕获概率随自导扇面角的变化曲线Fig. 10 Curve of acquisition probability versus homing sector angle
图11 捕获概率随垂直于视线方向的位置误差变化曲线Fig. 11 Curve of acquisition probability versus position error perpendicular to line of sight
图12 捕获概率随视线方向的位置误差的变化曲线Fig. 12 Curve of acquisition probability versus position error along line of sight
4 结束语
文中首先分析了反鱼雷鱼雷末制导捕获概率的定义, 将捕获概率问题描述成ATT和来袭鱼雷相对位置矢量落在一个扇形区域内的概率问题;通过定义新的视线坐标系, 将捕获概率的计算转化为二维概率密度函数在扇形区域内的积分; 利用积分区域近似法, 得到了一个简洁的捕获概率公式。仿真结果表明, 该近似算法精度高, 捕获概率公式清楚地表明了弹目距离、导引头最大自导作用距离、自导扇面角和位置误差精度对捕获概率的影响。文中所建立的捕获概率模型可为反鱼雷鱼雷的弹道设计和作战效能分析提供理论参考。
[1] 陈敬军. 国外反舰鱼雷的现状与发展趋势[J]. 声学技术, 2013, 32(2): 164-170.
Chen Jing-jun. The Status Quo and Development Trend of Overseas Anti-surface Ship Torpedo[J]. Technical Acoustics, 2013, 32(2): 164-170.
[2] 杨绪升, 刘建兵, 周庆飞. 声自导鱼雷射击诸元及误差对其捕获概率的影响[J]. 指挥控制与仿真, 2009, 31(5):93-97.
Yang Xu-sheng, Liu Jian-bing, Zhou Qing-fei. Effect on Acoustic Homing Torpedo Capture Probability of Fire Elements and Errors[J]. Command Control & Simulation,2009, 31(5): 93-97.
[3] 张亚, 孔军. 潜射巡航导弹现在点攻击捕获概率计算[J]. 指挥控制与仿真, 2010, 32(2): 40-42, 45.
Zhang Ya, Kong Jun. Discussion on Catch-probability of Submarine-launched Cruise Missile′s Current-point Attack Mode[J]. Command Control & Simulation, 2010,32(2): 40-42, 45.
[4] 赵晶, 戴幻尧, 来庆福, 等. 自控终点误差与目标散布下反舰导弹捕获概率分析[J]. 战术导弹技术, 2010(2):64-68.
Zhao Jing, Dai Huan-yao, Lai Qing-fu, et al. Analysis of Acquisition Probability of Anti-ship Missile Under Auto-control Term Imation Error and Target Scattering[J]. Tactical Missile Technology, 2010(2): 64-68.
[5] 雷志东, 张晓林, 郭桂友. 远程目标指示条件下的反舰导弹一次捕获概率研究[J]. 战术导弹技术, 2009(4):59-63, 67.
Lei Zhi-dong, Zhang Xiao-lin, Guo Gui-you. Study of One-time Acquisition Probability of Anti-ship Missile Under Condition of Long Distance Target Indication[J]. Tactical Missile Technology, 2009(4): 59-63, 67.
[6] 卢燕, 舒传模. 蒙特卡洛法在导弹末制导雷达对目标的位置捕获概率估计中的应用[J]. 战术导弹技术, 2005(1):55-58, 65.
Lu Yan, Shu Chuan-mo. The Application of Monte Carlo Method to Estimation of Position Acquisition Probability of Terminal Guidance Radar[J]. Tactical Missile Technology, 2005(1): 55-58, 65.
[7] 旷志高, 刘鼎臣. 反舰导弹纯方位发射捕捉概率计算方法[J]. 火力与指挥控制, 2003, 28(5): 109-112.
Kuang Zhi-gao, Liu Ding-chen. Discussion on the Calculation Method of Catch Probability about Anti-ship Missile′s Passive Radar Concealed Attack[J]. Fire Control & Command Control, 2003, 28(5): 109-112.
[8] 魏海光, 边聚广. 一种反舰导弹纯方位攻击捕获概率计算方法[J]. 四川兵工学报, 2012, 33(3): 22-25.
[9] 王军, 谷良贤, 王博, 等. 毫米波制导导弹系统误差及捕获概率研究[J]. 航空计算技术, 2012, 42(5): 25-27, 32.
Wang Jun, Gu Liang-xian, Wang Bo, et al. Research on System Error Analysis and Acquisition Probability of MMW Guide Weapon[J]. Aeronautical Computing Technique, 2012, 42(5): 25-27, 32.
[10] 谷志军. 拦截机动目标末制导技术研究[D]. 长沙: 国防科学技术大学, 2009.
[11] 明星, 陈喜, 蒋兴舟. 双雷齐射互导概率及目标捕获概率研究[J]. 鱼雷技术, 2006, 14(4): 52-55.
Ming Xing, Chen Xi, Jiang Xing-zhou. Probability Calculation of Mutual-guiding and Target Acquisition under Two Torpedoes Salvo[J]. Torpedo Technology, 2006, 14(4): 52-55.
[12] 李敏勇, 蒋兴舟. 网络鱼雷的实现和效能[J]. 鱼雷技术,2003, 11(3): 46-50.
[13] 田恒斗, 曹庆刚, 侯代文, 等. 火箭助飞鱼雷捕获概率的解析模型[J]. 兵工学报, 2013, 34(7): 916-921.
Tian Heng-dou, Cao Qing-gang, Hou Dai-wen, et al. Analytical Model of Rocket-assisted Torpedo′s Acquisition Probability[J]. Acta Armamentarii, 2013, 34(7): 916-921.
[14] 管贺, 孙学海, 薛昌友. 自导作用距离对主动声自导鱼雷捕获概率的影响[C]//中国造船工程学会电子技术学术委员会2011年海战场电子信息技术学术年会论文集.北京: 中国造船工程学会电子技术学术委员会, 2011:117-118, 157.
[15] 马国强. 主动自导鱼雷多次连续捕获概率的统计求解法[J]. 海军工程学院学报, 1992, 17(1): 76-82.
(责任编辑: 许妍)
Modeling and Simulation of Acquisition Probability Model for Terminal Guidance of Anti-Torpedo Torpedo
XIAO Cong-shan1,2,YANG Hui-zhen1,2
(1. School of Marine Science and Technology, Northwestern Polytechnical University, Xi′an 710072, China; 2. Science and Technology on Underwater Information and Control Laboratory, Xi′an 710075, China)
An analytical model of acquisition probability for terminal guidance of anti-torpedo torpedo (ATT) is established. Firstly, by considering the position error between an ATT and an incoming torpedo at the moment when midcourse guidance changes over to terminal guidance, the acquisition probability is described as an double integration of the probability density function in the domain determined by homing sector angle and homing range. The integration area is approximated to a rectangle. Then, an analytical expression of ATT′s acquisition probability, which relates to the position error between ATT and target, the distance from ATT to target, the ATT homing range, and the homing sector angle,is deduced. The effects of these four variables on ATT acquisition probability are analyzed quantitatively via simulation.
anti-torpedo torpedo; terminal guidance; acquisition probability; probability integral
TJ63
A
1673-1948(2015)06-0454-07
10.11993/j.issn.1673-1948.2015.06.012
2015-05-06;
2015-06-03.
国防科技重点实验室基金(9140C230404130C23084).
萧丛杉(1992-), 女, 在读硕士, 主要研究方向为反鱼雷鱼雷制导技术.
猜你喜欢
安徽文学(2021年11期)2021-11-09
智能计算机与应用(2021年5期)2021-10-05
红蜻蜓·低年级(2020年2期)2020-10-27
陕西画报(2018年2期)2018-05-21
军事运筹与系统工程(2017年1期)2017-07-31
小天使·三年级语数英综合(2017年6期)2017-06-07
水下无人系统学报(2016年3期)2016-10-13
制导与引信(2016年3期)2016-03-20
火控雷达技术(2016年3期)2016-02-06
火控雷达技术(2016年1期)2016-02-06
