基于改进型滑模观测器的无位置BLDCM控制
2015-10-21 01:17:02武亚恒樊启高惠晶孙璧文
服装学报 2015年3期
武亚恒, 樊启高, 惠晶, 孙璧文
(江南大学物联网工程学院,江苏无锡214122)
基于改进型滑模观测器的无位置BLDCM控制
武亚恒, 樊启高*, 惠晶, 孙璧文
(江南大学物联网工程学院,江苏无锡214122)
永磁无刷直流电机是多变量、强耦合的非线性系统,为进一步深入研究无位置BLDCM控制方法,以解决估算转子位置以及传统滑模观测器的抖振等问题,提出基于改进型滑模观测器的无位置BLDCM控制方法,引入正弦函数的[-π/2,π/2]部分作为滑模观测器的控制函数,以削弱抖振;同时构建反电动势观测器直接提取反电动势信号,并利用李雅普诺夫理论证明其稳定性,引入CORDIC算法以获取电机转子位置和转速。仿真实验结果表明,该控制策略能够准确估计电机转子位置,同时削弱观测器的抖振问题,提高系统精度和可靠性。
无刷直流电机;滑模观测器;反电动势观测器;CORDIC算法
永磁无刷直流电机(BLDCM)因其具有结构简单、功率密度高等优点而得到广泛的应用[1];同时无位置传感器BLDCM的控制方法,可节省安装传感器的空间并且减少信号线数量,有效提高了系统可靠性及工作效率,近年来已成直流无刷电机领域的研究热点。
宋飞[2]研究了续流二极管位置补偿方法,但需提供6个用于比较电路的隔离电源;王大方[3]提出了断开相绕组端电压和假中性点电压的关系实现换相,却增加了硬件电路的复杂性;郭鸿浩等[4]构建了无刷直流电机反电动势自适应滑块观测模型,然而未能解决滑模观测器的抖振和转子位置误差补偿问题;郭宇赛等[5]提出了矢量控制速度估算策略;LIN Qinghua等[6]研究了滑模控制BLDCM方法,但仿真过程中的反电动势信号经滤波后存在相位延迟;周大鹏等[7]提出使用卡尔曼和改进滑模观测器的方法控制PMSM,却未进行转子位置补偿;程帅等[8]提出滑模控制多相无轴承电机无位置传感器控制,但使用低通滤波器进行反电动势的高频滤波后存在相位延迟,且转子角度的补偿随转速变化,不易补偿。
为了削弱传统滑模观测器的抖振,并准确估算BLDCM转子的位置,文中提出基于改进型滑模观测器的无位置BLDCM控制方法。由滑模观测器估算反电动势信号,并计算出转矩;考虑到arctan(x)在DSP中通常采用查表方式,往往难以达到预期精度要求[9],文中采用CORDIC(Coordinate Rotation Digital Computer)算法获取转子位置和转速;另外采用转矩环代替电流环,以减少非理想相反电动势无刷直流电机的转矩脉动,提高控制性能。
1 无刷直流电机模型
假设BLDCM磁路不饱和,不计涡流和磁滞损耗影响,其在α,β静止坐标系下的状态方程为

式中:iα,iβ,uα,uβ分别为α,β坐标系下的相电流、相电压;L为相电感;R为相电阻,Ke为反电动势系数; eα,eβ为反电动势,ωe为转速;θe为转子位置。
无刷直流电机转矩表达式:

式中:ωe为转子机械角速度。
2 改进型滑模观测器设计
2.1 电流观测器设计
由于Sign函数的开关特性,致使矢量系统存在很大抖振问题,因此文中采用正弦函数取代传统的Sign函数,对开关特性进行改善,削弱抖振,其结构框图如图1所示。

图1 电流观测器Fig.1 Diagram of the current observer


由式(1)、式(3)可知:电流误差方程为

2.2 反电动势观测器设计
由于传统的滑模观测器中,得到的反电动势中含有大量的高次谐波,需增加一阶滤波电路,但是增加了滤波电路直接导致转子位置的延迟,进而需要实时对转子位置进行补偿,且转子位置估算不准确。为克服这一问题,文中直接构建反电动势观测器提取反电动势,并采用李雅普诺夫函数进行证明。
由式(1)可知反电动势模型为

根据式(6)构建反电动势观测器


对式(7)进行稳定性证明,依据李雅普诺夫定理,选择

对式(10)求导可知

将式(9)代入式(10),整理可得

由式(12)可知,文中设计的反电动势观测器具有渐进稳定性。由反电动势观测器得到反电动势观测量,可直接计算电机转子位置为

2.3 CORDIC设计
CORDIC处理机是一种迭代运算[10],其设计框架如图2所示。
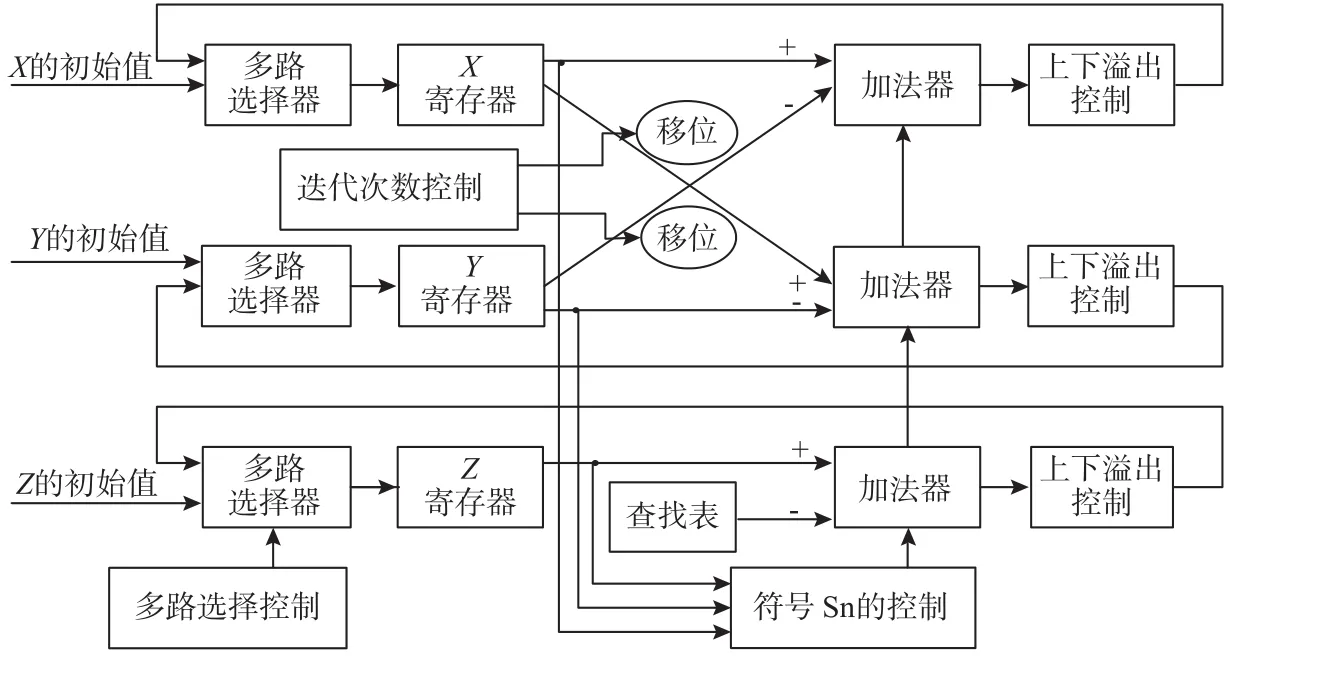
图2 CORDIC处理机的设计框图Fig.2 Block diagram of CORDIC processor
3 仿真实验
基于改进型滑模观测器的无位置BLDCM控制方法的结构框架如图3所示。
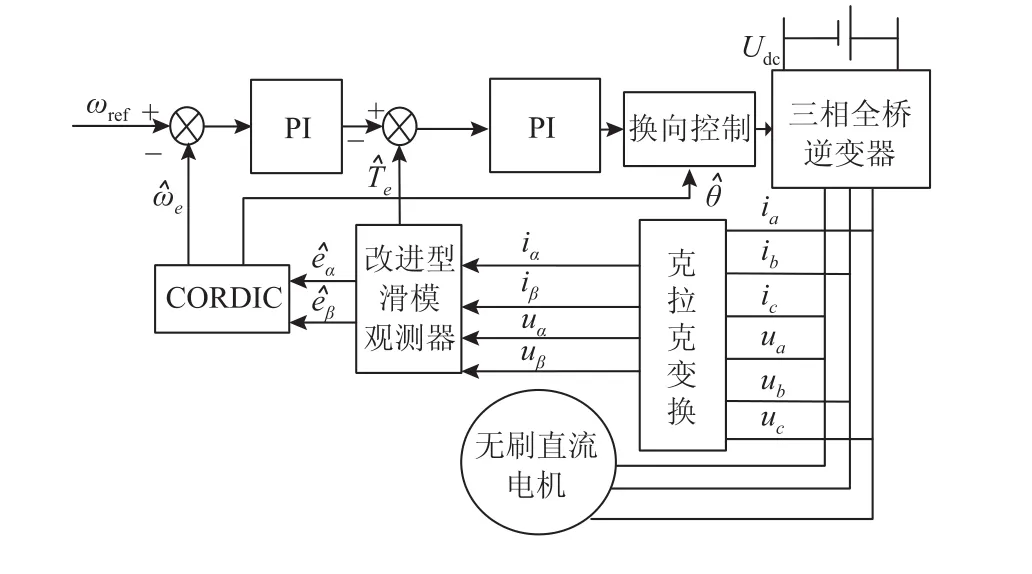
图3 BLDCM无位置传感器控制结构Fig.3 Structure diagram of BLDCM sensorless control
3.1 仿真验证
文中基于Matalb/Simulink建立BLDCM控制系统的仿真模型。其中电机的参数如下:额定电压U= 20 V;额定转速n=3 000 r/min;相电阻R=21.2 Ω;相电感L=0.052 H;反电势系数ke=0.143 3 V·s/rad;阻尼系数B=0.1 g·m·s/rad;转矩系数kt=143.3 g·m/A;转动惯量J=0.1 g·m2。
图4和图5分别为传统滑模观测器和改进型滑模观测器。转速为800 r/min,并在0.25min时增加2 N·m负载。

图4 传统滑模观测器转速Fig.4 Speed diagram of TSMO
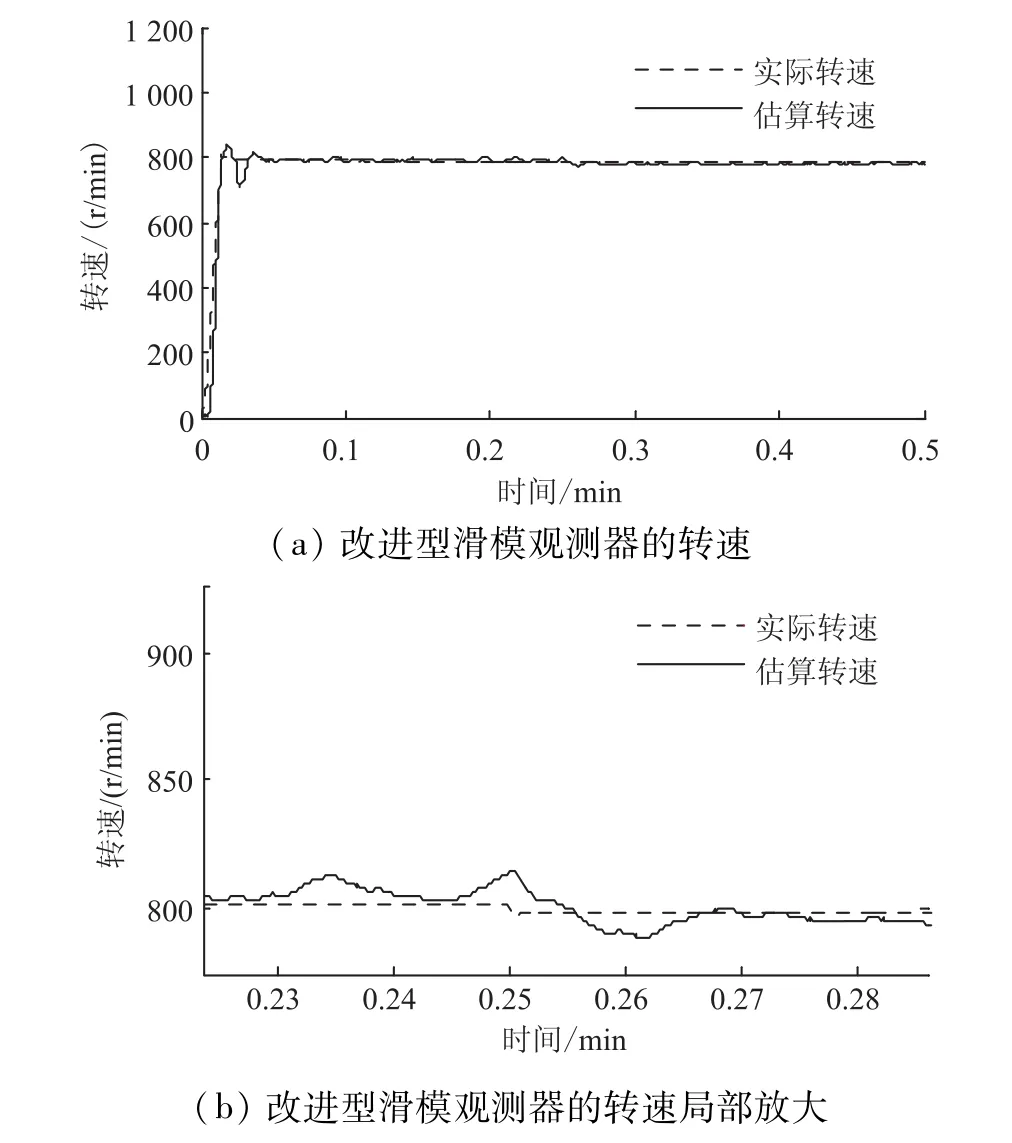
图5 改进型滑模观测器的转速Fig.5 Speed of diagram of ISMO
由图4和图5可以看出:前者超调量8%,后者超调量7%,二者虽都能跟踪实际转速并有较好的抗负载能力,但前者的转速存在较大的抖振。
图6和图7分别为传统滑模观测器和改进型滑模观测器在转速为800 r/min时转子实际位置θ、估算位置。

图6 传统滑模观测器的转子位置Fig.6 Rotor position diagram of TSMO

图7 改进型滑模观测器的转子位置Fig.7 Rotor position diagram of ISMO
图8为不同转速下转子位置的绝对误差平均值的仿真结果。
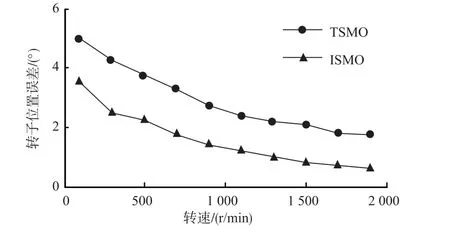
图8 BLDCM转子位置误差波形Fig.8 W aveform of BLDCM rotor position error
由图8可知,在800 r/min时转子在传统滑模观测器和改进型滑模观测器的误差分别约为2.8°和1.6°,且转子的位置误差随转速的增加不断的减小。究其原因,传统滑模观测器估算的反电动势存在抖振,致使估算角度和实际角度存在误差,而改进型滑模观测器明显削弱了抖振,较好地跟踪实际位置,从而证实文中提出方法的正确性。
3.2 实验验证
采用TMS320F2812DSP作为主控芯片并采用FPGA作为辅助,实验电路原件参数与上述系统仿真参数一致。
图9和图10分别为传统滑模观测器和改进型滑模观测器在转速为800 r/min时转子实际位置θ、估算位置。

图9 传统滑模观测器的转子位置Fig.9 Rotor position diagram of TSMO
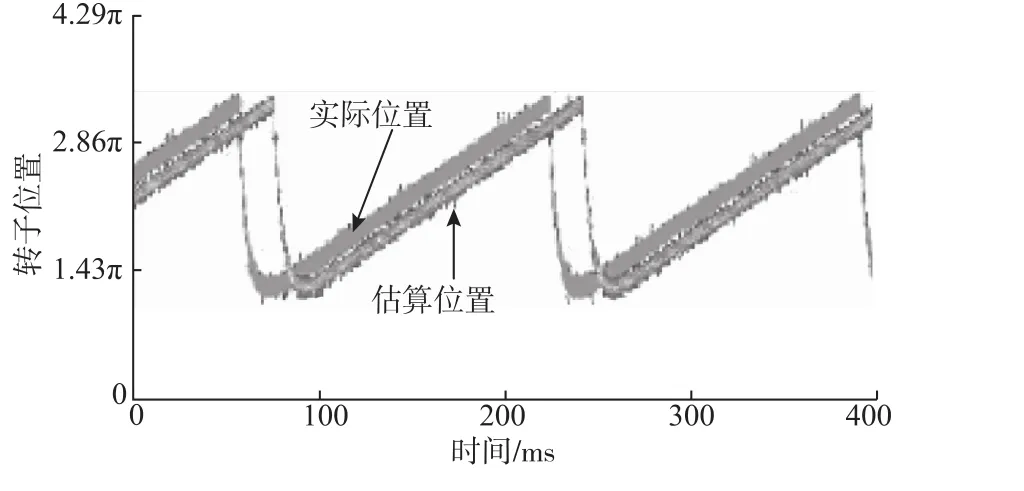
图10 改进型滑模观测器的转子位置Fig.10 Rotor position diagram of ISMO
图11为不同转速下转子位置的绝对误差平均值实验结果。

图11 BLDCM转子位置误差波形Fig.11 W aveform of BLDCM rotor position error
由图11可知,在800 r/min时转子在传统滑模观测器和改进型滑模观测器的误差分别为大约为7.8°和5.3°,且转子的位置误差随转速的增加而减小,而改进型滑模观测器明显削弱了抖振,较好地跟踪实际位置,进一步验证文中提出方法的正确性。
4 结 语
文中根据滑模观测器的理论设计改进型滑模观测器,估算BLDCM的转子位置和转速。将正弦函数引入到滑模控制中,明显削弱了滑模的抖振;同时构建反电动势观测器直接提取反电动势信号,取消了传统的一阶低通滤波器和相角补偿,为精确估算转子位置引入CORDIC算法。仿真和实验结果表明:该新型滑模控制器能明显削弱抖振,并精确实现对转子的位置估算,提高了系统精度和可靠性。
[1]夏长亮.无刷直流电机控制系统[M].北京:科学出版社,2009:1-12.
[2]宋飞,周波,吴小婧.校正无位置传感器无刷直流电机位置信号相位的闭环控制策略[J].中国电机工程学报,2009,29 (12):52-57.
SONG Fei,ZHOU Bo,WU Xiaojing.Closed loop controlmethod to correct position phase for sensorless brushless DCmotor[J]. Proceedings of the CSEE,2009,29(12):52-57.(in Chinese)
[3]王大方,祝雅琦,金毅,等,一种新颖的无刷直流电机位置检测方法[J].电工技术学报,2013,28(2):139-144.
WANG Dafang,ZHU Yaqi,JIN Yi,etal.A novel research on detecting position of brushless DCmotors[J].Transactions of China Electrotechnical Society,2013,28(2):139-144.(in Chinese)
[4]郭鸿浩,周波,左广杰,等.无刷直流电机反电势自适应滑模观测[J].中国电机工程学报,2011,31(21):142-149.
GUO Honghao,ZHOU Bo,ZUO Guangjie,et al.Adaptive sliding-mode observer for back electromotive force estimation of brushless DCmotor[J].Proceedings of the CSEE,2011,31(21):142-149.(in Chinese)
[5]郭宇赛,陈明,陈宁,等.BLDCM无速度传感器矢量控制速度估计方法[J].控制工程,2013,20(3):348-356.
GUO Yusai,CHEN Ming,CHEN Ning,et al,Rotor speed estimate method for sensorless vector control of BLDCM[J].Control Engineering of China,2013,20(3):348-356.(in Chinese)
[6]LIN Qinghua.A novel position detectionmethod of sensorless brushless DCmotor based on slidingmode observer[C]//2011 4th International Conference on Power Electronics Systems and Application(PESA).Hongkong:IEEE,2011.
[7]周大鹏,张自友.基于卡尔曼和改进滑模观测器的永磁电机无位置控制[J].中国测试,2013,39(3):104-107.
ZHOU Dapeng,ZHANG Ziyou.Sensorless controlof PMSM based on improved slidingmode observer and Kalman filter[J].China Measurement and Test,2013,39(3):104-107.(in Chinese)
[8]程帅,姜海博.基于滑模观测器的单绕组多相无轴承电机无位置传感器控制[J].电工技术学报,2012,27(7):71-77.
CHENG Shuai,JIANG Haibo.Position sensorless control based on sliding mode observer for multiphase bearinglessmotor with single set ofwindings[J].Transactions of China Electrotechnical Society,2012,27(7):71-77.(in Chinese)
[9]杨运,唐晓春,邓世刚.CORDIC算法在基于FPGA的旋转解码和PMSM矢量控制中的应用[J].微电机,2013,46(7): 68-73.
YANG Yun,TANG Xiaochun,DENG Shichang.Application of CORDIC algorithm in resolver-to-digital and PMSM vector-control based on FPGA[J].Micromotors,2013,46(7):68-73.(in Chinese)
[10]ZHANG Dezhi,ZHANG Shaobo.Application of CORDIC in capacitive rotary encoder signal demodulation[C]//2012 the 8th IEEE International Symposium on Instrumentation and Control Technology.London:IEEE,2012:61-65.
(责任编辑:邢宝妹)
Sensorless Control Research of BLDCM Based on Im p roved Sliding M ode Observer
WU Yaheng, FAN Qigao*, HUIJing, SUN Biwen
(School of Internet of Things Engineering,Jiangnan University,Wuxi214122,China)
Brushless DCmotor(BLDCM)is a multivariable nonlinear control system with strong coupling.This paper studies the sensorless controlmethod of BLDCM by weakening the chattering problem of the traditional sliding mode observer and by estimating the position accurately,and proposes a BLDCM sensorless control based on the improved slidingmode observer for estimating the motor rotor position and speed.The sine function is used to weaken the chattering problem,and to build an electromotive force observer for extracting the electromotive force signal directly.At the same time the Lyapunov theory is used to prove the stability of the algorithm.The coordinate rotation digital computer algorithm is introduced to estimate the position and speed of the rotor accurately.Simulation and experimental results demonstrate that the control strategy can accurately estimate the position and speed of the rotor and weaken the chattering problem of the observer.
BLDCM,SMO,the electromotive force observer,CORDIC algorithm
TM 33
A
1671-7147(2015)03-0278-05
2014-12-29;
2015-01-21。
国家自然科学基金项目(51405198);中央高校基本科研业务费专项基金项目(JUSRP11464);江苏省自然科学基金项目(BK20130159)。
武亚恒(1986—),男,河南开封人,电气工程专业硕士研究生。
*通信作者:樊启高(1986—),男,江西南昌人,副教授,硕士生导师,工学博士。主要从事复杂环境下协同感知技术和光机电一体化与先进制造技术研究。Email:qgfan@jiangnan.edu.cn
猜你喜欢
大电机技术(2022年5期)2022-11-17 08:12:56
一重技术(2021年5期)2022-01-18 05:42:08
郑州大学学报(工学版)(2020年2期)2020-06-16 12:43:14
汽车电器(2019年2期)2019-03-22 03:35:16
测控技术(2018年4期)2018-11-25 09:47:14
电子制作(2017年1期)2017-05-17 03:54:12
淮南师范学院学报(2015年3期)2015-03-22 01:16:17
电机与控制应用(2015年2期)2015-03-01 03:49:22
电机与控制应用(2015年1期)2015-03-01 03:49:10
电测与仪表(2014年13期)2014-04-04 12:04:16