光圈识别的数字化实现
2015-10-14 11:22王鑫高玫王群
科技视界 2015年28期
王鑫 高玫 王群

【摘 要】本文介绍了一种光圈识别的数字化评价方法。运用数字图像处理技术,通过Matlab软件编程实现了对光圈的计算和评价,并将该方法的结果与传统测量方法的结果进行比较,证明了该评价方法的有效性。
【关键词】面型偏差;数字图像处理
【Abstract】In this paper, a dgitalization evaluation for surface form deviation measurement is introduced. Usining the technology of the digital graphic processing , the calculation and evaluation of the surface form deviation are achieved on the Matlab. The method is proved effective by comparing the calculated result with the visual measured result.
【Key words】Surface form deviation;Digital graphic processing
0 序言
光圈识别是以等厚光波干涉原理检验球面(平面)光学部件的面形偏差,该方法是在圆形区域内,通过垂直位置所观察到的干涉条纹(俗称光圈)的数目、形状、变化和颜色来确定的[1]。使用激光平面干涉仪观察干涉条纹并进行人工光圈目视估读的方法常因不同测试人员的经验和估读习惯不同,造成估读结果的不同;同时光圈识别需要对人员进行专门的培训;且识别的速度较慢,尤其其象散偏差,需找到象散偏差的最大位置,分别进行两次光圈高低的判断才能得出结果,检验耗时较长。
本文以Matlab软件作为开发环境,以数据处理为手段,对Zygo GPI XP/D激光数字平面干涉仪测量并保存的数据进行处理,通过编程、计算得到面形偏差值、并与光圈识别的目视估读法进行对比,验证了其正确性。
1 光圈识别的各参数
在光圈识别的面形偏差中,主要由以下参数评价:1)半径偏差(N):被测光学表面相对于参考光学表面的偏差;2)象散偏差(Δ1N):被测光学表面相对于参考光学表面在两个相互垂直方向上产生的光圈数不等所对应的偏差;3)局部偏差(Δ2N):被测光学表面相对于参考光学表面在任一方向上产生的干涉条纹的局部不规则性程度[1]。
通过对光圈识别的理解,半径偏差(N)为保存的面形数据(已与参考光学表面比对过的面形数据)中某一个方向上高度上的最大最小值之差(PV值);象散偏差(Δ1N)与两个垂直方向上的半径偏差有关,需进行光圈的高低识别,当两个垂直方向上的光圈高低方向一致时,则象散偏差为两个方向半径偏差的差值,否则为两个方向半径偏差的和值;局部偏差(Δ2N)是面形数据中的最大、最小高度与高度中间值之差,取绝对值较大的差值作为局部偏差值。
2 算法实现
本实验使用Zygo GPI XP/D激光数字平面干涉仪,保存被侧零件的表面数据,使用matlab软件、参考MetroPro Reference Guide中对存储数据的说明、对其进行读取,并考虑到光圈识别主要应用在圆形光学零件,通过对各评价参数的理解拟定了如下算法:
半径偏差:计算数据区域的圆心和半径;以通过圆心的水平方向的一条直线为计算线,并以每1度为步长逆时针旋转180度;对于计算线在每个角度上时,均以像素为单位(Zygo GPI XP/D激光数字平面干涉仪采集的数据其X,Y坐标均为像素),计算每个单位长度上点的高度值(参考MetroPro Reference Guide,其高度值可换算为条纹数fr),由于任意角度上的任意单位长度上的点不一定会恰巧落到数字激光干涉仪所保存的像素矩阵的交点上,因此其高度值与该点周围像素矩阵交点的高度值有关,如图1,其计算公式如式1;计算每各角度上的计算线上所有像素的最大、最小值之差(PV值);并找到这180个角度上计算线上所有的PV值中的最大值,即为该零件的半径偏差。
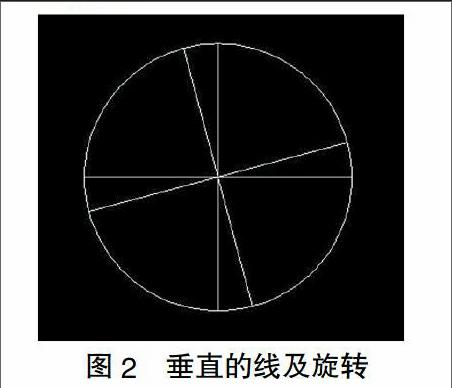
象散偏差:与半径偏差类似,定义垂直方向的两条线为计算线,并以每1度为步长逆时针旋转90度,如图2;对于计算线在每个角度上时,均以像素为单位,计算每个单位长度上点的高度值;判断每个角度中的两条计算线的凸凹性是否一致,以确定其光圈高低是否一致:首先对每条计算线进行二次曲线的拟合;判断两条计算线的二次曲线的二阶导数的乘积的正负,光圈高低方向相同的乘积为正,反之为负;计算每个角度上两条计算线的PV值;分别计算每个角度上的象散值:两条计算线的二次曲线的二阶导数的乘积为正的,将两条计算线的PV值相减作为该方向的象散值,反之乘积为负的,将两条计算线的PV值相加作为该方向的象散值;找到这90个角度上的象散值的最大值,即为该零件的象散偏差
局部偏差:对高度数据进行计算,求得其最大值、最小值和中值。以中值为基准、分别求出最大值与中值、中值与最小值的差,选其较大的作为局部偏差的计算值。中值是将所给的一组数据从大到小,或从小到大排列,奇数个数时取中间的数字,偶数时取中间两个数的平均值。
3 matlab计算结果与光圈识别法计算结果的对比
分别用光圈识别的目视判读和matlab的计算分析法对各种偏差形式的零件进行测量,对比结果如表1:
从表中可以看出matlab计算法与光圈识别的目视判读法读出的结果大体相同,其略有不同的原因分析主要如下:
1)焦距的调节。对焦不正确、图像边缘模糊对测量结果的影响较为明显。
2)精度原因。目视判读的刻度精度最小为0.05个条纹(fr),而仪器的测量精度高,其z方向精度可达fr/150。
3)随机误差。空气的扰动、测量时的震动都可以造成随机误差。
4)条纹调节的不同。干涉条纹在测量时的方向和数量不同对测量结果略有影响。
5)背面涂敷不均和表面洁净度不高带来的误差。
4 结论
本文使用matlab软件实现了对光圈识别的数字化评判,并通过实验验证了其正确性,该方法可以提高检验质量,杜绝因疲劳、粗心大意等人为造成的误判,并避免了不同人员光圈识别估读不同带来的推诿扯皮现象,节省了人员的光圈识别培训成本、节省了由于检验的过松造成的后期无法装调或过严返工等导致的成本,并为今后为测量数字化和自动化奠定了基础。
【参考文献】
[1]国家标准总局.光学零件的面形偏差检验方法(光圈识别)GB2831-81[S].1982.
[2]MetroPro Reference Guide[Z].
[3]朱仁峰.精通Matlab 7[M].北京:清华大学出版社,2006.
[4]章毓晋.图像处理和分析[M].北京:清华大学出版社,1999.
[责任编辑:曹明明]
猜你喜欢
航天返回与遥感(2022年3期)2022-07-07
道路交通管理(2022年2期)2022-03-11
道路交通管理(2021年8期)2021-09-02
电子技术应用(2021年1期)2021-01-22
小福尔摩斯(2019年2期)2019-09-10
小学生必读(低年级版)(2019年9期)2019-04-13
小学生必读(低年级版)(2019年10期)2019-04-13
航天返回与遥感(2018年2期)2018-05-17
光学精密工程(2016年7期)2016-08-23
CHIP新电脑(2016年3期)2016-03-10