
动态搜索调节调制波偏置的SPWM三电平逆变器中点电压平衡控制方法
2015-09-21 10:08吕建国吴馥云胡文斌应展烽吴军基
电力自动化设备 2015年12期
吕建国,吴馥云,胡文斌,应展烽,吴军基
(1.南京理工大学 能源与动力工程学院,江苏 南京 210094;2.南京理工大学 自动化学院,江苏 南京 210094)
0 引言
近年来,多电平逆变器已经广泛地应用在中高压大功率变换场合,其电路拓扑与控制方法也成为了研究热点。与两电平逆变器相比,多电平逆变器具有功率开关器件电压应力低、电磁噪声低和输出波形谐波畸变率低等诸多方面的优点[1]。多电平逆变器输出电平数越多,所得到的阶梯波平台阶数越多,则输出波形越接近标准工频正弦波。三电平逆变器已成为多电平逆变器中的首选,其中代表性的电路拓扑之一是二极管箝位型NPC(Netrual Point Clamped)三电平逆变器。该拓扑直流侧必须用到2个串联的直流母线电容,则逆变器输出桥臂相电压有3种电平,线电压有5种电平。在理想情况下,每个电容的电压为直流母线电压的一半,但实际系统中由于电容容值存在误差、开关器件特性不一致、三相不平衡运行等因素使得2个直流母线电容电压有偏差,出现中点电压不平衡,这是该拓扑固有的典型问题。中点电压不平衡情况将影响输出波形质量,使得输出电压含有低频谐波(如3次谐波)或直流偏置,同时会增加开关管的电压应力;严重时会损坏开关管,影响系统正常工作[1-5]。因此,中点电压平衡控制问题一直是三电平逆变器的研究重点。
针对该问题,国内外学者提出诸多中点电压平衡控制问题的方法,主要分为2类主流的方法:基于空间矢量调制进行中点电压平衡控制[2-9];基于载波调制进行中点电压平衡控制[10-16]。前者主要是通过重新分配冗余正负小矢量的作用时间实现中点电压平衡。后者主要是通过在调制波中加入零序分量实现中点电压平衡。文献[2,4,9]提出了用其他矢量代替正负小矢量的空间矢量调制控制方法,但是该类方法中点电压调整系数的算法较复杂,不易于数字实现和更多电平逆变系统的控制。文献[6]提出了基于60°坐标系的改进型虚拟空间矢量控制方法,无需进行扇区判断以及大量三角函数的计算,解决中点电压偏移问题。文献[7]基于简化的空间矢量脉宽调制 SVPWM(Space Vector Pulse Width Modulation)算法,提出了一种根据三相输入电流和中点电流波动精确控制中点电位的策略,解决中点电位的直流偏差和电压波动问题。从文献[12-14]可以知道,注入零序电压分量的方法,其动态调节过程需要引入电流幅值、功率因数角、电容容值等因素,才能提前预测上下电容电压偏差的变化量,使电压偏差快速减小。
文献[10]提出了一种基于变载波幅值的正弦脉宽调制 SPWM(Sinusoidal Pulse Width Modulation)控制方案,通过改变载波幅值实现中点电压的平衡,该方法能够有效消除中点电压的直流偏置,但该方法的控制对象为中点电压不平衡分量在一个工频周期的平均值,因此控制周期长,且对中点电压波动抑制效果不明显。
本文针对文献[10]所提方法的不足之处,提出了一种动态搜索调节调置波偏置量DSMO(Dynamic Searching Modulation-wave Offset)的 SPWM 控制方法(以下简称DSMO方法),达到控制中点电压平衡的目的。该DSMO方法通过采样中点电压,根据调制比、输出电流的幅值、输出功率因数角在线计算出调制波偏置量调节系数的限值范围,搜索到最优的调节系数,动态调节调制波的偏置量,达到不同负载条件下的中点电压平衡控制的目的。与文献[10]中变载波幅值的方法相比,本文所提DSMO方法的动态调节速度快、稳态误差小,提高了输出波形质量。该方法同样适用于SVPWM控制方法下的中点电压平衡控制。仿真和实验结果都验证了该方法的可行性和有效性。
1 中点电压不平衡的基本原理
如图1所示,定义dUC为直流母线电容C1和C2上的电压差,简称电容电压差。因此,当中点电压平衡时,直流母线电容C1和C2的电压,dUC=0即中点电压平衡。当直流母线电容C1和C2均分电压时,三电平逆变器每相桥臂输出有3种电平)。 以“P”、“O”、“N”分别表示输出 3种电平对应的工作状态[17]。3种输出电平与开关管工作状态的对应关系如表1所示。Sxn(x=a,b,c;n=1,2,3,4)的“√”、“×”的状态分别表示该开关管的导通、关断状态[18-21]。
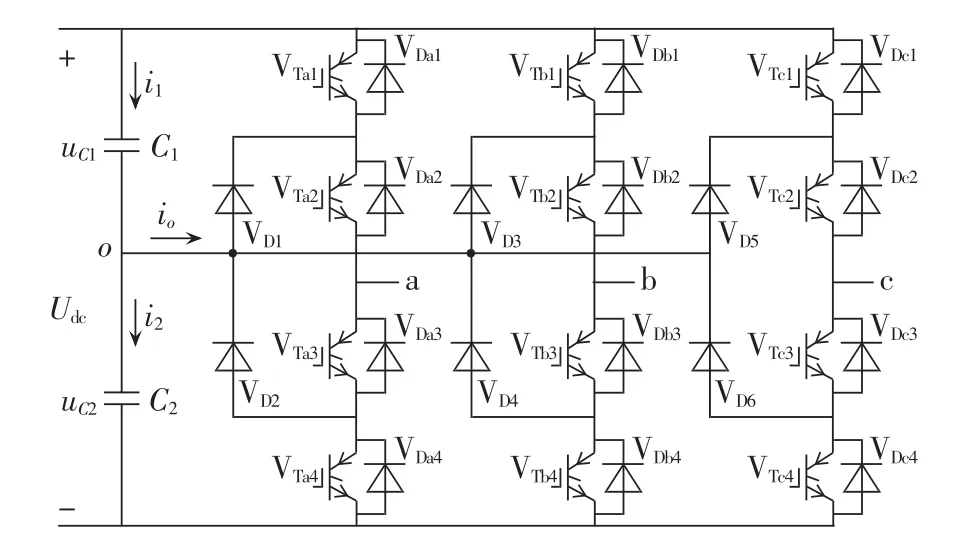
图1 NPC三电平逆变器主电路Fig.1 Main circuit of NPC three-level inverter
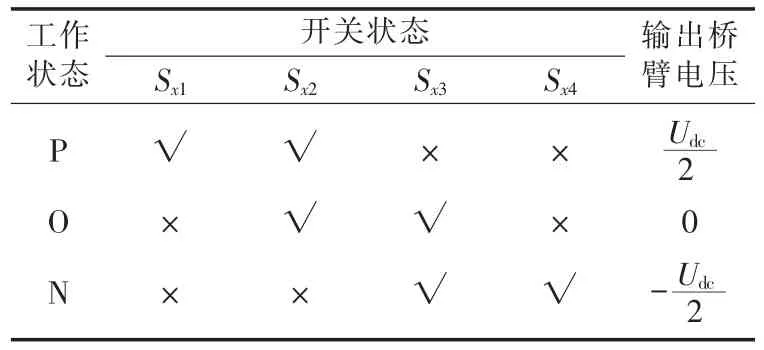
表1 输出电平与开关状态Table 1 Output level and switch conditions
理想条件下,若载波幅值为单位量,则三相正弦调制波为:
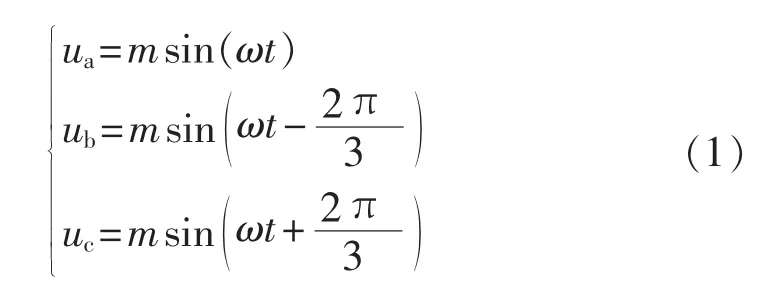
其中,m为调制比,0≤m≤1;ω为工频角频率。
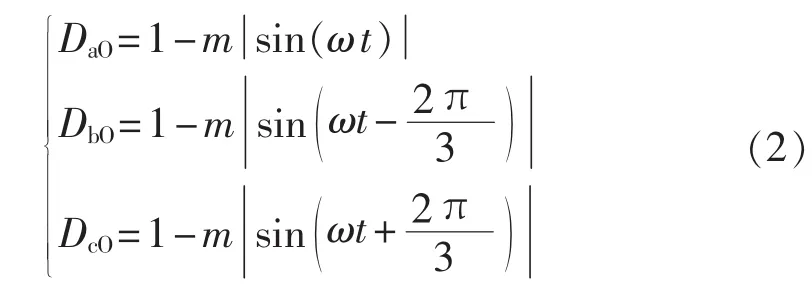
每个载波周期,“O”状态作用的占空比表达式为:
三相负载电流为:
其中,Im为负载电流的幅值;φ为功率因数角。
一个载波周期Ts内,流出中点o的平均电流io,即中点电流 io可以表述为[22]:

从图1分析可得,中点电流io与流经电容C1、C2的电流i1、i2的关系可表述为:
其中,uC1为直流母线的正极与中点之间的电容C1上的瞬时电压;uC2为直流母线的中点与负极之间的电容C2上的瞬时电压。
令dUC_spwm为传统SPWM方式下电容电压差,如果直流母线电容C1、C2容值相等,即C1=C2=C,则由式(4)、式(5)可以得到中点电流引起的电容电压差dUC_spwm为:

将 m、Im、Ts、C 进行标幺化,可得 ua、io、dUC_spwm随ωt的变化趋势如图2所示。
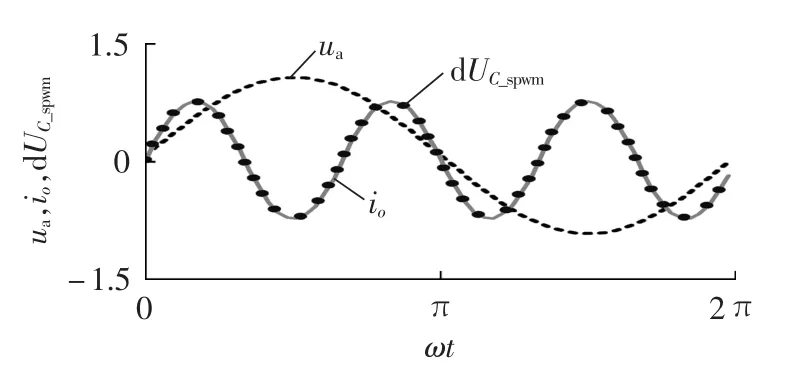
图2 一个工频周期内ua、io和dUC_spwm的波形Fig.2 ua,ioand dUC_spwmwaveforms within a cycle
从图中可以看出,在一个工频周期内,io、dUC_spwm均以3倍的工频频率波动。由于中点电流的波动引起中点电压的波动,因此,减小中点电流的脉动幅值,就能够达到控制中点电压平衡的目的。
2 DSMO方法的控制原理与实现
本文DSMO方法控制下,在每个载波周期Ts内,以kdUC_spwm作为三相调制波的调节信号,其中k为调节系数,调节后的三相调制波表达式为:
调节后,相应的“O”状态占空比的表达式为:
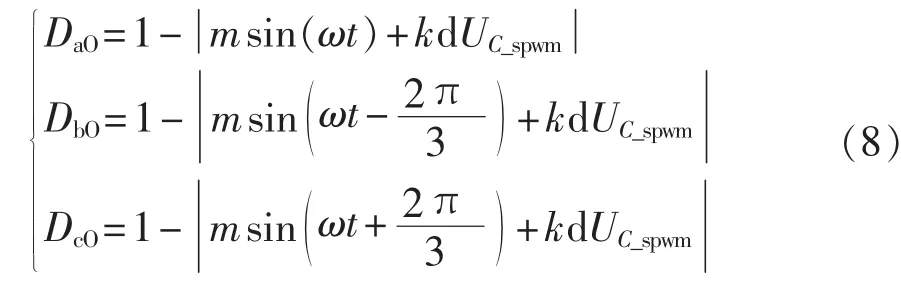
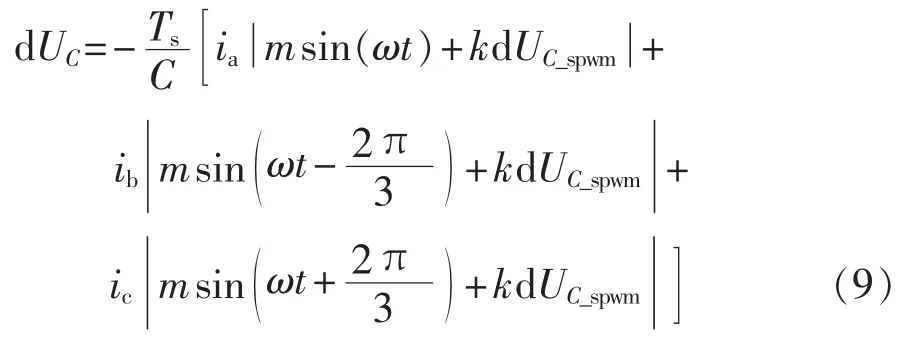
将式(8)代入式(6)可得,一个载波周期 Ts内,调节后的dUC的表达式为:
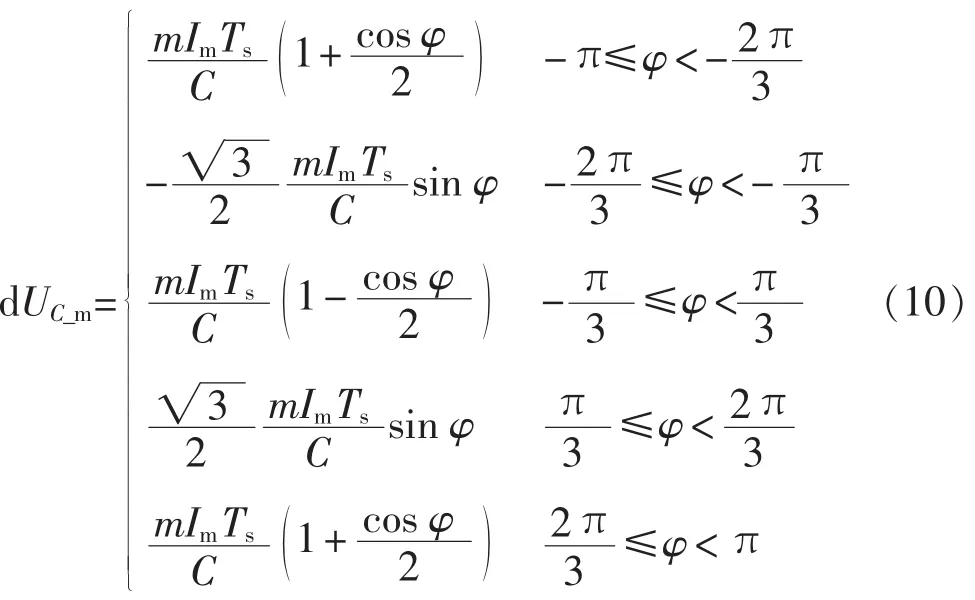
由式(6)可得,在传统SPWM方法控制下,电容电压差dUC_spwm幅值的表达式为:
当m和φ一定时,dUC的脉动幅值由k值决定。为保证“O”状态占空比 DaO、DbO、DcO满足范围[0,1],k的取值范围必须满足以下约束条件:
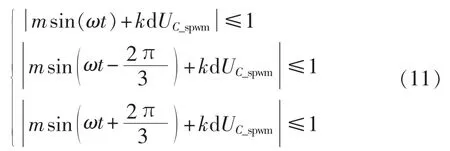
将式(10)代入式(11),化简可得k可以取到的限值,则 k 的取值范围为[0,kmax]。其中,上限值 kmax为:
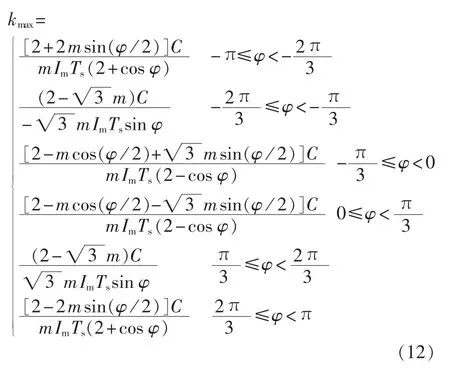
变量 Im、Ts、C 标幺化后,k 的取值范围与 m、φ 的关系如图3(a)所示。k可取图中坐标轴底面与曲面所包络范围内的值。图3(b)给出了不同k值时,dUC的变化趋势。k值不同时,dUC幅值不同。当φ=0、m=0.8时,k的取值范围满足:

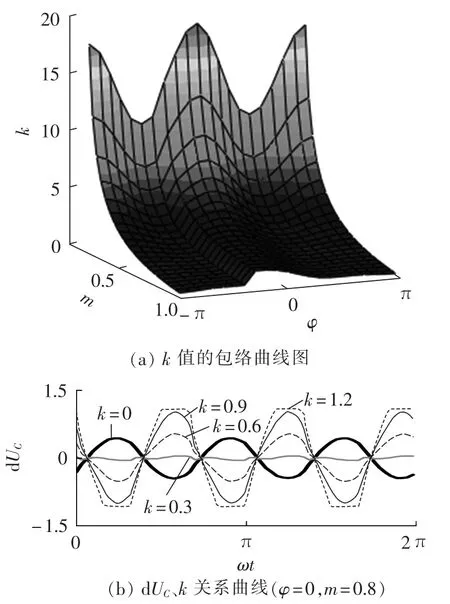
图3 中点电压dUC和k的数学关系Fig.3 Mathematical relationship between dUCand k
当k=0.3时,dUC幅值最小。因此,在计算出的k的取值范围内,必定存在一个最优的k,使得中点电压的波动量较小,满足一定的阈值要求。此时,“O”状态的占空比包络曲线图如图4所示。
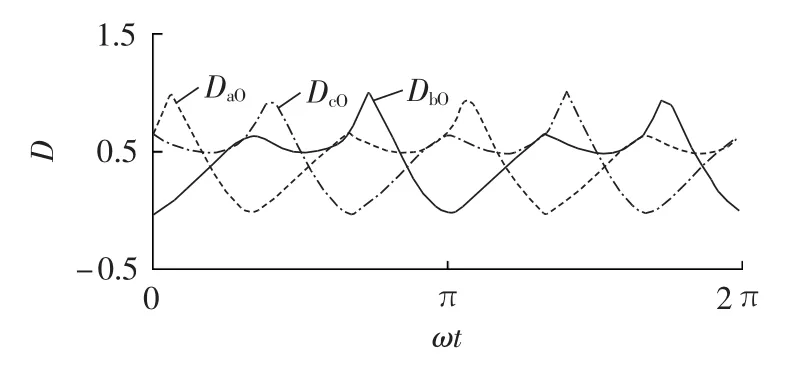
图4 k=0.3时“O”状态的三相占空比Fig.4 Duty cycle of three phases for State O when k is 0.3
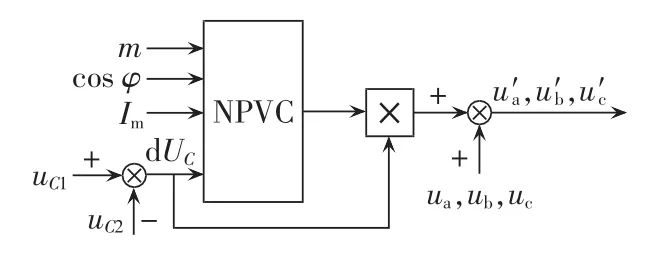
图5 简化的中点电压控制原理图Fig.5 Simplified schematic diagram of neutral-point voltage control
本文DSMO方法的简化原理图,如图5所示。其中 NPVC是中点电压控制单元,ua、ub、uc是叠加偏置量前的调制波信号,u′a、u′b、u′c是叠加偏置量后的调制波信号。NPVC 的输入参数是 m、cos φ、Im、dUC。NPVC的主要功能是:通过采样直流母线电压、直流母线电容C1和C2的电压、逆变器输出的电压和输出电流、由输出电压和输出电流之间的相位差得到功率因数角,在线计算出k的最优解取值范围,采用定步长、变步长或者智能搜索方法得到最优的k值,此时该最优值对应于电容电压差dUC达到较小的稳定阈值,从而减小中点电压波动幅值、消除中点电压的直流偏置,实现对中点电压的平衡控制。
本文仿真和实验验证DSMO方法采用的是定步长得到最优的k值,其控制流程图如图6所示。其中,dUC_pp为 dUC的平均值;kmax(n)为 kmax在每个工频周期更新一次的计算值;kmax(n-1)为在上一个工频周期计算得到的kmax值;km为当前控制周期的k的取值;M为定步长搜索迭代次数,一般取0~10。
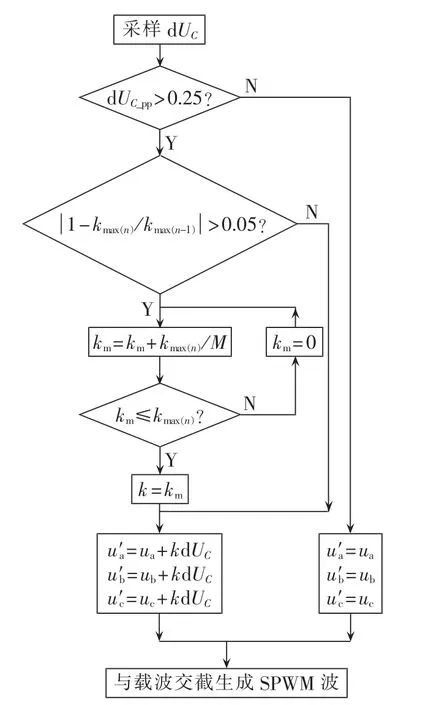
图6 DSMO方法的流程图Fig.6 Flowchart of DSMO
3 仿真与实验结果
为验证本文提出DSMO方法的有效性,运用MATLAB搭建了NPC三电平逆变器的仿真模型。
仿真条件如下:直流母线电压Udc=200 V,直流母线电容C1和C2的电容容值均为150 μF,调制比m=0.8,载波频率fs=20 kHz,负载为三相对称阻性或阻感性负载,三相输出总功率Po=200 W。图7为仿真模型的原理图。
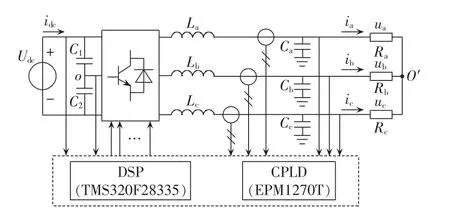
图7 系统的原理图Fig.7 Schematic diagram of system
3.1 仿真分析
当出现严重不平衡时,即直流母线电容C1、C2上电压相差较大时,为验证DSMO方法的控制效果,在图1所示NPC三电平逆变电路中,直流母线电容C1上并联2150 Ω的电阻,使得直流母线电容C1和C2的等效阻抗不一致,图8给出了三相负载为阻性和阻感性时,文献[10]中采用的变载波幅值控制方法和本文DSMO方法的对比仿真结果。图8中,仿真波形依次是电容电压uC1和uC2、调制波调节系数k或者变载波幅值调节量h、a相输出电流ia波形。加入文献[10]变载波幅值控制方法和本文DSMO方法后的对比情况,如表2所示。
仿真结果表明采用本文DSMO方法时,系统在不同负载条件下,电容电压uC1、uC2的偏差量均能快速地减小,且其波动幅值稳定在较小的阈值范围内,取得了较好的稳态效果。与文献[10]中变载波幅值的控制方法相比,本文所提DSMO方法在控制稳态误差和调节时间上有明显优势。
3.2 实验验证
论文基于DSP-CPLD的二极管箝位型三电平逆变器实验平台进行了实验研究。系统采用TMS320F-28335 DSP作为主控数字处理单元,实验条件与仿真条件相同。在直流母线电容C1上并联2150 Ω的电阻时,系统出现中点电压不平衡,加入文献[10]中变载波幅值控制方法和本文DSMO方法前后(控制前采用的是传统SPWM控制),直流母线电容C1和C2上的电压 uC1和 uC2、a相桥臂输出电压 uds、a相负载电流ia实验波形,如图9所示。
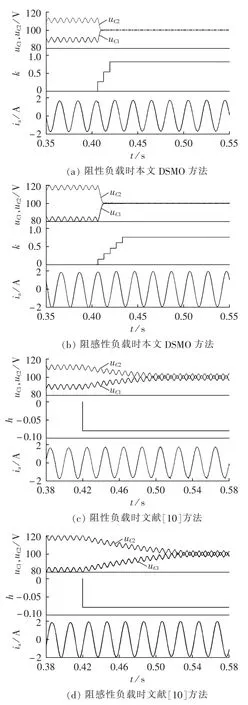
图8 仿真波形Fig.8 Simulative waveforms
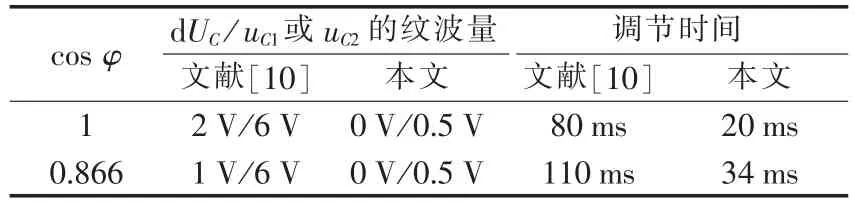
表2 仿真结果分析Table 2 Analysis of simulative waveforms
表3给出了三电平逆变器在出现中点电压不平衡时,文献[10]变载波幅值和本文DSMO方法作用下中点电压平衡控制效果和调节时间的情况。
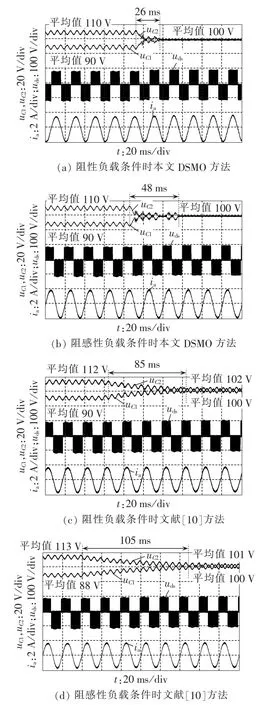
图9 中点电压调节过程的实验波形Fig.9 Experimental waveforms of neutral-pointvoltage adjustment
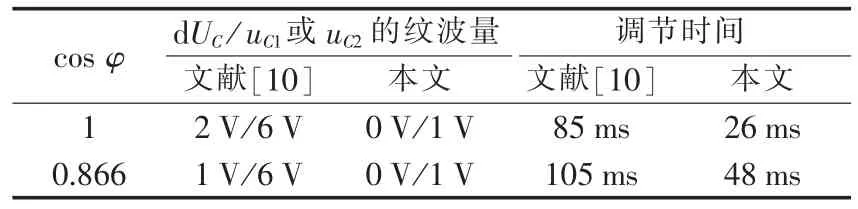
表3 实验结果对比Table 3 Comparison of experimental results
在中点电压出现不平衡时,传统SPWM、文献[10]变载波幅值和本文DSMO这3种方法作用下输出电流的谐波畸变率THD(Total Harmonic Distortion)情况,如图10所示。从图中可以看出,不同负载条件下,传统SPWM和文献[10]中变载波幅值方法作用时输出电流THD含量均超过了谐波标准(3%),而本文DSMO方法作用时,输出电流THD较低。
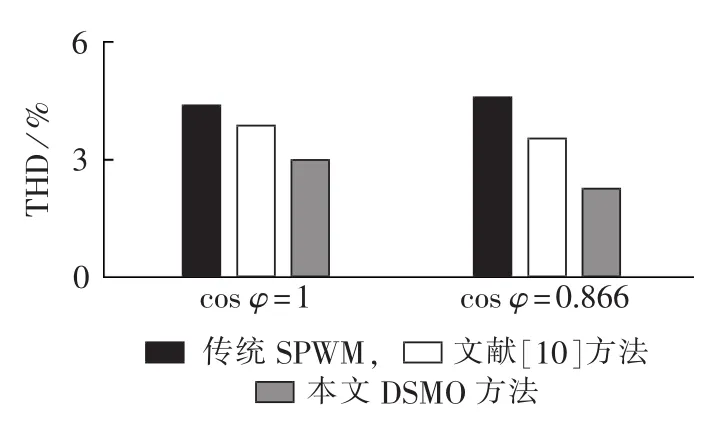
图10 谐波含量实验值Fig.10 Measured THD
与文献[10]中变载波幅值的控制方法相比,本文所提DSMO控制方法的中点电压动态调节速度快、稳态误差小,且输出电流的THD低,输出波形质量得到提高。
4 结论
针对二极管箝位型三电平逆变器的中点电压平衡控制问题,本文提出了一种DSMO方法。分析了该方法的基本原理,推导了调制波偏置量调节系数取值上限的表达式,给出了定步长搜索调制波偏置最优调节量的实现过程。通过仿真和实验对比分析了传统SPWM、文献[10]变载波幅值和本文DSMO方法控制下的中点电压平衡控制效果和输出波形谐波值。得到以下结论:
a.解决中点电压平衡问题,需要考虑中点电压的直流偏置和波动2个方面的问题;
b.本文DSMO方法能有效消除中点电压的直流偏置和抑制其纹波的波动幅值;
c.与文献[10]中所提变载波幅值的控制方法相比,DSMO方法在中点电压纹波抑制方面有明显优势且稳态误差小,在阻性或阻感性负载条件下,输出电流THD值更低,波形质量得到提高。
猜你喜欢
汽车实用技术(2022年15期)2022-08-19
中国信息化(2022年5期)2022-06-13
中学生数理化(高中版.高考数学)(2021年4期)2021-07-20
学苑创造·C版(2018年3期)2018-05-28
北京航空航天大学学报(2016年6期)2016-11-16
电测与仪表(2016年5期)2016-04-22
电测与仪表(2016年22期)2016-04-12
电测与仪表(2016年17期)2016-04-11
电子工业专用设备(2015年4期)2015-05-26
电测与仪表(2015年2期)2015-04-09
