
基于转子串联电阻的双馈风力发电机低电压穿越
2015-09-21 10:08张文娟马浩淼张国慨张飞鸽
电力自动化设备 2015年12期
张文娟,马浩淼,张国慨,张飞鸽
(1.宝鸡文理学院 电子电气工程系,陕西 宝鸡 721016;2.陕西师范大学 计算机科学学院,陕西 西安 710062;3.中核四〇四有限公司,甘肃 兰州 732850)
0 引言
近年来,随着变速恒频双馈风力发电装机容量的不断增加,现代电力规范要求风电机组在外部电网故障导致机端电压跌落时,仍具有一定时间的不间断并网运行能力,即具备低电压穿越LVRT(Low Voltage Ride-Through)能力[1-2]。
目前国内外相关专家关于变速恒频双馈风力发电机组LVRT技术的研究主要集中在2个方面[3-4]。其一是当电网故障引起机端电压出现小值跌落时,通过改进转子励磁变流器控制算法来实现双馈感应电机 DFIG(Doubly-Fed Induction Generator)LVRT,如文献[5]利用定子磁链的消磁方法实现LVRT控制算法;文献[6]将非线性控制策略运用到DFIG控制中以提高系统的动态响应;文献[7]通过在DFIG转子变流器控制中注入阻尼进而补偿故障时滞后的转子电压相位,从而达到提高系统LVRT的能力。上述几种软件改进算法虽能在一定程度上改善系统故障性能,但大都对电机参数具有较强的依赖性,并且对于电网故障引起机端电压出现较大幅度跌落时,由于转子变流器自身功率的限制,无法提供足够的转子电压去限制故障电流冲击,难以较好地满足高质量并网需求。
与软件研究相比,基于硬件研究的LVRT控制技术力图在电网故障时切入硬件保护电路,以达到消耗系统多余能量的目的[8]。目前就商用MW级风电机组而言,硬件研究行之有效的办法是在DFIG转子侧附加合适的撬棒保护(Crowbar protection)电路[9]。 Crowbar保护具有简单有效、经济成本低、便于实现等优点,但其在投入工作后,DFIG作为普通的感应电机与电网连接运行,需从电网吸收大量无功功率,将不利于跌落电网电压的恢复。针对于此,文献[10]在文献[11]的基础上建议采用转子串电阻RSDS(Rotor Series Damping Resistor)方案来代替转子Crowbar保护,并通过仿真研究了不同限流电阻对机组瞬态特性的影响,为选择合适的转子限流电阻范围提供参考。但文献[10]在探讨限流电阻取值时并未考虑其大小对转子电压的影响,较大转子电阻的投入虽可以加速转子过电流的衰减,但却增大了控制所需转子电压;并且串联转子电阻因过电流投入后,DFIG有功、无功功率如何分配等问题,文献[10]并未涉及到。鉴于此,本文从故障期间机组整体需求角度出发,实现了DFIG在电网电压跌落时,转子串电阻LVRT与系统之间的协调控制:一方面,优化转子串联的限流电阻值,确保LVRT期间转子变流器的安全;另一方面,充分利用转子串电阻DFIG的可控性,提出根据系统需求合理分配DFIG有功、无功功率,促使电网故障电压快速恢复的控制策略。通过10 kW双馈风力发电模拟平台进行了转子串电阻功率协调控制实验研究,验证所提控制方案的正确性与可行性。
1 故障状态DFIG数学模型
在静止abc坐标系下,DFIG的方程可写成如下形式[12]:
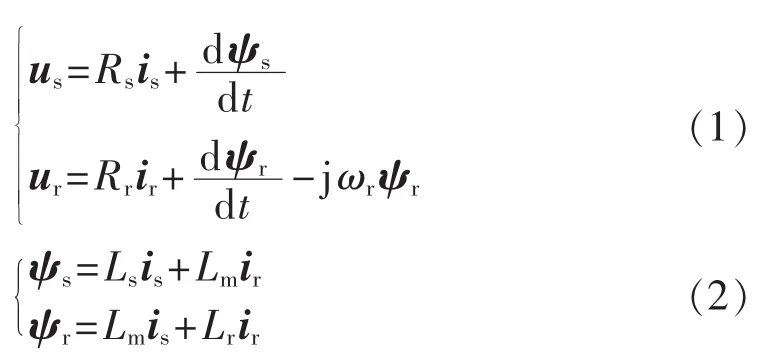
其中,us=[usausbusc]T,ur=[uraurburc]T,分别为定、转子电压;is=[isaisbisc]T,ir=[irairbirc]T,分别为定、转子电流;ψs=[ψsaψsbψsc]T,ψr=[ψraψrbψrc]T,分别为定、转子磁链;Ls>0、Lr>0、Lm>0 分别为定、转子自感及互感;Rs、Rr分别为定、转子电阻;ωs、ωr分别为 DFIG 定、转子角速度。
若稳态运行时定子电压幅值为U0,假设t=0时电网发生跌落深度为p的对称故障,则跌落前后定子电压可写为:

根据磁链与电压的关系,忽略定子电阻,则根据式(1),故障前后定子稳态磁链可写为:
为了分析定子磁链及转子电流在故障期间的暂态变化情况,先假设转子开路,即ir=0,据式(1)及式(2)可得定子磁链微分方程为:

根据电网电压跌落前后定子磁链不能突变的原则,上述定子磁链微分方程的解可分解为2个部分:一部分为以同步速旋转的定子磁链分量,其幅值大小由定子电压幅值决定;另一部分为定子电压突然跌落引起的定子磁链直流分量,该直流分量在空间保持静止,并以一定的时间常数衰减。据上述分析,结合式(4),得出故障期间定子磁链暂态表达式为:

2 转子串电阻LVRT控制策略
2.1 基于转子串电阻控制的理论分析
据式(2)的磁链方程,将转子磁链写成定子磁链的表达形式为[5]:


式(8)等号右侧的第一项是由定子磁链变化引起的转子回路反电动势所对应的转子电压,若令

则电网故障时,转子电流的动态数学模型为:

从式(10)可以看出,电网故障时,转子电流变化率与电网电压的跌落深度、转子角速度及转子电阻的大小有关系。在现场工况一定的条件下,可以通过适当增加转子电阻来抑制故障时刻转子电流变化率,即通过转子串电阻来代替转子Crowbar保护实现DFIG的LVRT。
为了进一步说明转子串电阻控制对转子电流幅值的抑制作用,将式(6)及式(7)代入式(1)中的转子电压方程得转子电流为:
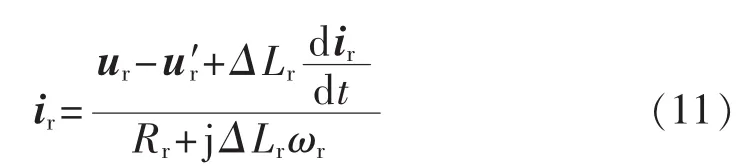
由前面分析可知,适当增加转子电阻可抑制故障时刻转子电流,因此,式(11)决定的转子电流随转子串联电阻的增大而减小。
转子串联电阻具体电路结构如图1所示。其中,Lsg、Lrr分别为网侧变流器及转子侧变流器滤波电感。Chopper为直流侧卸荷电路。稳态运行时,转子回路中的晶闸管控制开关导通,转子电流不流过旁路限流电阻Rrs;当电网发生故障时,DFIG定转子电流增大,传感器检测到转子电流阈值时,就迅速关断转子回路晶闸管控制开关,同时限流电阻Rrs串入转子回路从而快速释放定转子多余能量。当转子电流下降到规定阈值时,转子回路晶闸管控制开关再次导通,Rrs从转子侧切除,恢复系统稳态运行。
2.2 转子串电阻阻值的设计
转子串电阻阻值的选取应遵循两方面的约束条件:其一,所串转子电阻的阻值应该足够大,以确保电网故障时转子电流在变流器所能承受的范围内;其二,所串转子电阻的阻值不能太大,以免转子电压超出变流器的安全余量。本文采用转子所串电阻Rrs的设计原则是:在保证故障电流不超过转子变流器所允许的最大电流前提下,尽量减小Rrs的阻值以降低所需的转子电压,最大限度拓宽双馈风电系统LVRT的可控范围。
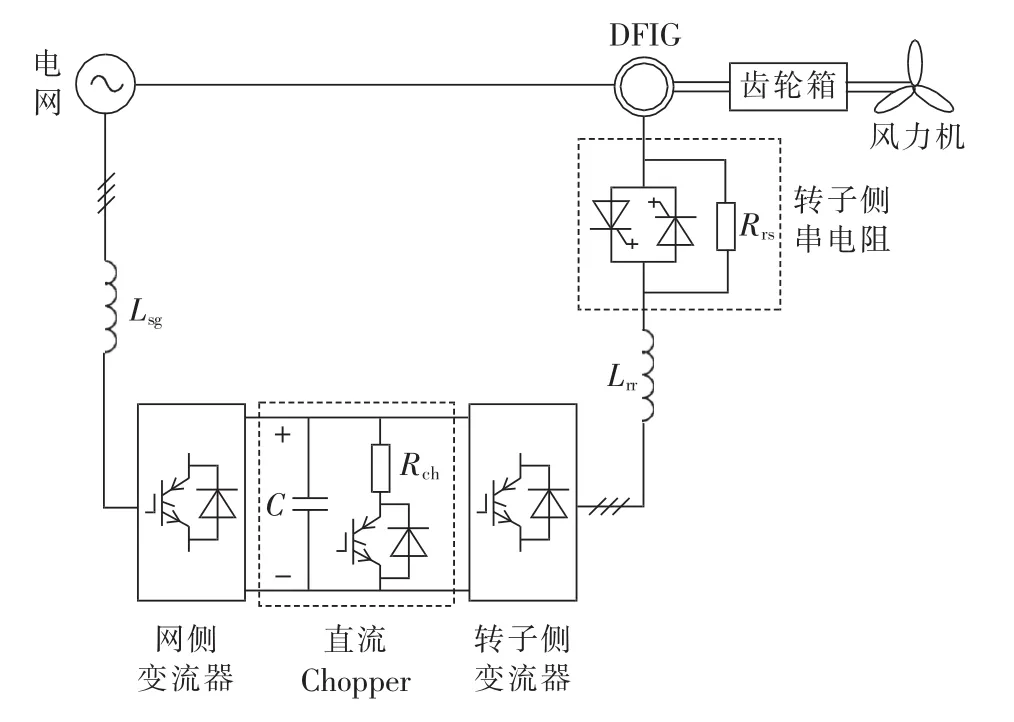
图1 双馈风电机组转子串电阻结构框图Fig.1 Block diagram of DFIG wind turbine unit with rotor series resistor
考虑最严重情况,即电网发生三相短路故障时,文献[13]给出了短路时转子电流最大值表达式:

其中,Us为DFIG定子端电压有效值;Xs为定子等效电抗。
通常情况下,转子变流器所允许的最大电流Irmax为其额定电流Ire的2倍,即:

将式(13)代入式(12)可知,要确保在任何时刻转子电流均不超过Irmax,转子所串电阻Rrs应满足:

考虑转子电压约束条件,设Urmax为转子变流器所能承受的最大耐压值,则:

要确保在任何时候转子电压均不超过Urmax,转子所串电阻Rrs应满足:

其中,Urlim为转子电压的安全限值;λ为安全余量系数。综合式(14)和式(16),得 Rrs的取值范围为:

2.3 转子串电阻功率协调控制策略
转子串电阻DFIG的LVRT控制不同于传统的转子Crowbar保护,在电网电压跌落时,DFIG定子侧与电网并网的同时,转子侧检测到过电流,转子串联电阻投入,DFIG仍处于可控运行。因此,如何利用DFIG的可控性,根据系统需求,寻求一种能充分发挥其动态无功支撑功能的LVRT方案就显得十分必要和迫切。为了分析转子串电阻LVRT期间DFIG的有功、无功功率特性,首先建立双馈变流器及DFIG的功率模型如图2所示。图中,Pt、Qt为双馈风电系统总的输入有功、无功功率;Ps、Qs为DFIG定子侧输入的有功、无功功率;Pr、Qr为DFIG转子侧输入的有功、无功功率;Pg、Qg为网侧变流器输入的有功、无功功率。
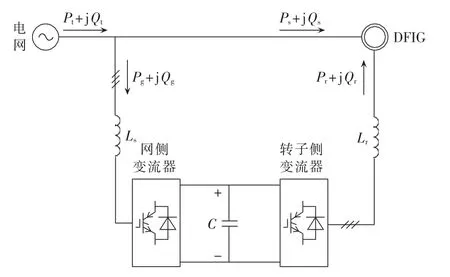
图2 双馈风电机组功率模型图Fig.2 Power model of DFIG wind turbine unit
根据系统的功率关系有[14]:

忽略DFIG绕组铜损及铁损,定、转子功率关系可写成如下表达式:
其中,s为双馈电机转差率。
需要指出的是,LVRT期间转子串电阻投入后,DFIG转子侧输出的有功功率大小必须满足转子串联电阻Rrs消耗的有功功率,在此基础上,考虑DFIG暂态稳定性,补充电网恢复所需无功功率。根据这一原则,转子有功、无功电流可整定如下。
为了不使直流母线电压跌落,转子所串电阻Rrs消耗的有功功率按最大转子电流整定,即:

按图2所示功率流向,为保持直流母线电压输入输出功率平衡,网侧变流器及转子侧变流功率关系为:

当转子变流器控制采用定子磁链定向,忽略定子绕组电压降时,usd=0,usq=U0=ωsψsd,DFIG 定子有功功率可写为:

将式(20)及式(21)代入式(22),得到转子串电阻时转子所需的有功电流为:

因此,不超出转子变流器最大电流Irmax的转子无功电流Ird应满足:

电网电压跌落时,双馈风电机组输出无功功率有助于电网电压的恢复,但其发送无功的大小还应考虑DFIG暂态稳定性约束。据李雅普诺夫稳定性判据,保持DFIG暂态稳定性的必要条件为[14]:

综合式(24)、(25),可得转子串电阻期间转子变流器输出的无功电流指令限值为:

式(23)—(26)分别构成了转子串电阻LVRT期间转子侧变流器的有功、无功电流约束条件。图3给出了该方式下系统总的控制流程图。
a.当直流母线电压Udc达到其阈值(本文设定为1.1倍直流母线额定电压)时,直流侧Chopper投入;Udc降到其阈值以下时,Chopper电路切除。
b.当转子电流Ir达到其阈值(本文设定为1.5倍转子额定电流)时,转子串电阻Rrs投入,转子侧变流器切换至功率协调控制模式,即按式(23)—(26)所述原则进行有功、无功功率分配;当Ir降到其阈值以下时,转子串电阻电路切除,转子侧变流器恢复至正常控制模式,可采用之前的稳态控制,也可利用故障期间其他主动控制技术更好地改善双馈风电机组的LVRT性能。
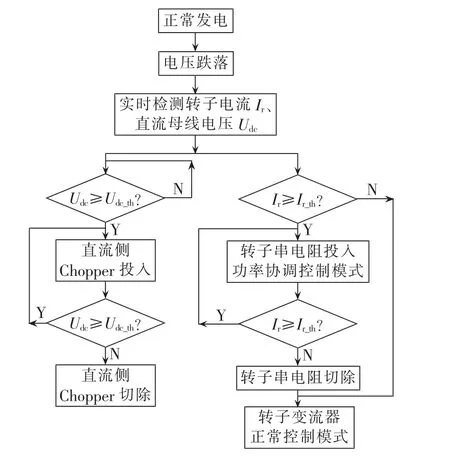
图3 转子串电阻系统控制流程图Fig.3 Flowchart of rotor series resistor system control
3 实验结果
为了验证转子串电阻方式下LVRT功率协调控制策略的有效性,对其进行了实验研究。具体实验参数为:DFIG额定功率P=10 kW;极对数np=3;频率f=50 Hz;定子联结方式 Y 接,Rs=0.7 Ω,Ls=2.1 mH;转子联结方式Y接,折算到定子侧后,Rr=0.59 Ω,Lr=4.1 mH;互感Lm=72.6 mH。采用自制的阻抗型电压跌落发生器模拟电网电压跌落故障,故障前DFIG转速为917 r/min,定子侧输出有功功率6.5 kW。系统控制采用Ti公司DSP TMS320F28335芯片实现,实验波形通过Tek公司DPO 3054示波器捕获。
图4、图5、图6为电网发生三相对称故障时DFIG的端电压ut降到故障前的50%、故障持续时间625 ms,转子侧变流器分别采用传统的Crowbar保护控制和转子串联电阻LVRT控制策略的直流母线电压Udc、转子电流ir及定子电流is实验波形对比图。
图4(a)为传统的Crowbar控制直流母线电压,稳态运行时直流侧额定电压为650 V,电网故障开始和结束时,检测到转子电流及直流侧电压超过阈值时,直流侧Chopper及转子侧Crowbar投入运行,但Crowbar的投入必须封锁转子侧变流器脉冲,从而破坏了网侧变流器及转子侧变流器的稳态功率平衡关系,因此使得直流母线电压升高至785 V。图4(b)为转子串联电阻控制,可以看出,故障开始及结束时,直流母线电压变化平稳,最大值只有720 V。
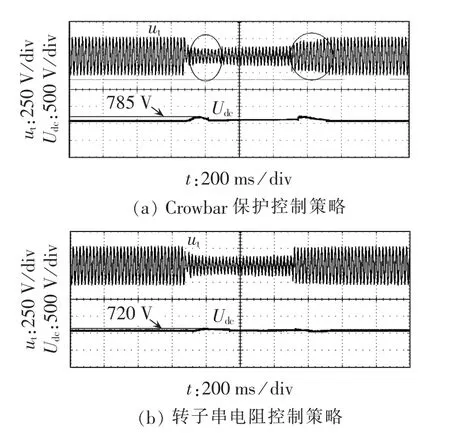
图4 直流母线电压对比波形Fig.4 Comparison of DC bus voltage waveforms
图5为转子电流对比波形,相比于Crowbar保护,图5(b)中转子串联电阻投入后,LVRT过程采用本文提出的功率协调控制策略,即使转子侧输出有功功率在满足转子所串电阻消耗的有功功率基础上,采用无功功率优先控制,因此及时补充了故障电压恢复所需的无功功率,并未出现电网故障电压二次下降的情况。而在图5(a)的Crowbar控制中,Crowbar保护投入后,DFIG工作在普通异步发电机模式需从电网吸收大量无功功率,因此导致故障电压进一步下降,这对电网电压的恢复是极其不利的。
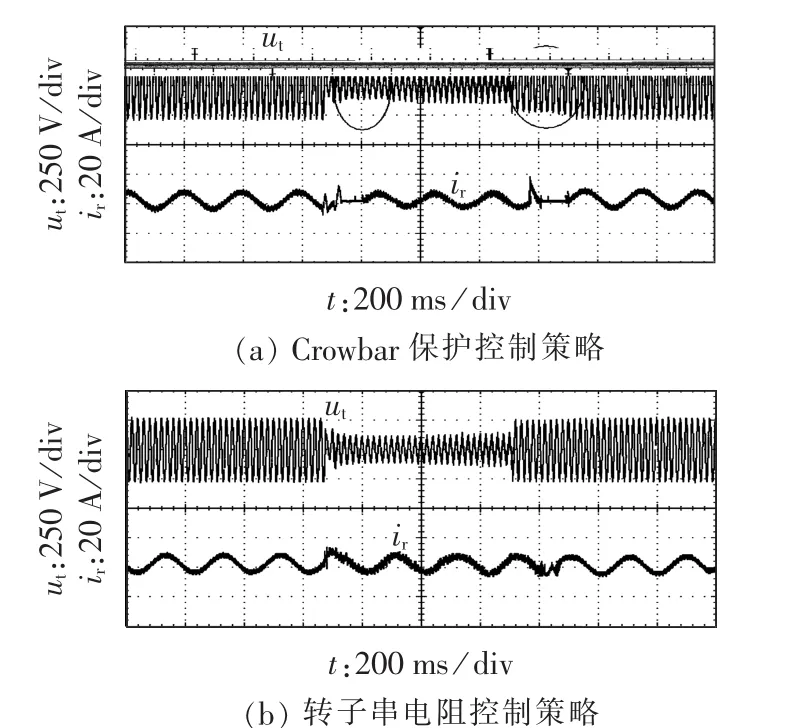
图5 转子电流对比波形Fig.5 Comparison of rotor current waveforms
图6为定子电流对比波形。可以看出,采用Crowbar保护控制,DFIG定子电流在故障开始和结束时有明显的过电流,而在转子串电阻功率协调控制方式下,定子过电流明显改善,但在转子串联电阻投入后,定子电流大小略有下降,这跟系统设置的无功优先控制原则有关,待转子串联电阻切除后,定子继续向电网供电,以帮助电网故障电压恢复。
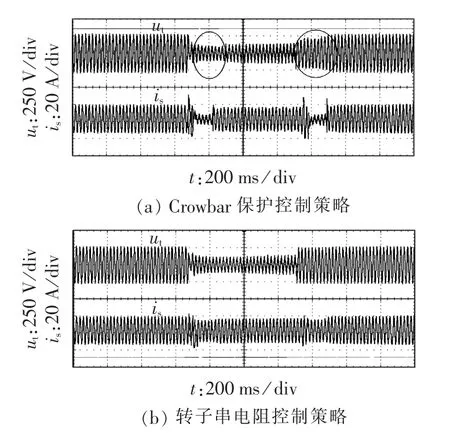
图6 定子电流对比波形Fig.6 Comparison of stator current waveforms
4 结论
为了改善双馈风力发电系统LVRT过程中,转子Crowbar保护投入后DFIG不可控状态,本文在深入分析电网电压跌落时转子电流动态数学模型基础上,采用转子串联电阻控制来代替Crowbar保护。
a.提出在转子串联电阻投入后,充分利用DFIG的可控性,在确保转子所需及DFIG暂态稳定性基础上,采用无功功率优先控制原则,及时补充电网电压恢复所需的无功功率。
b.所提控制策略在一台10 kW双馈风力发电机组上进行了实验验证。实验结果表明,转子串电阻LVRT功率协调控制具有比Crowbar保护更好的暂态性能。
猜你喜欢
上海大中型电机(2021年2期)2021-07-21
防爆电机(2021年1期)2021-03-29
测控技术(2018年2期)2018-12-09
电测与仪表(2016年8期)2016-04-15
电测与仪表(2016年10期)2016-04-12
通信电源技术(2016年4期)2016-04-04
通信电源技术(2016年5期)2016-03-22
华东理工大学学报(自然科学版)(2015年2期)2015-11-07
电测与仪表(2014年17期)2014-04-04
电测与仪表(2014年11期)2014-04-04
