有挠性驱动单元的双足机器人研制与步行实验
2015-09-21 01:40:24侯月阳吴伟国高力扬
哈尔滨工业大学学报 2015年1期
侯月阳,吴伟国,高力扬
(哈尔滨工业大学 机电工程学院,150001哈尔滨)
人类肌肉具有缓冲减振作用,可在具有外界冲击时有效保护人体关节;而仿人机器人大多采用减速器等传动装置驱动,缺乏人类肌腱柔性,无法承受很大的冲击载荷,而且人体关节由两块或更多肌肉驱动,以非线性弹簧特性使关节柔顺,仿人机器人应该具有类似人的肌肉一样的挠性驱动.挠性驱动机器人可吸收振动,减缓冲击,保护机构,同时减小系统的惯量影响,进行能量存储,以实现双足机器人稳定步行[1].液压驱动存在油液泄露问题,气动人工肌肉控制精度低,绳驱动则无上述缺点,然而绳驱动具有延迟和回差,研究挠性驱动机器人具有深远意义.
日本东京大学JSK研究室于2010年研制出KENZOH仿人机器人[2],该机器人采用一种绳驱动关节刚度调整机构,其输出力矩不足以驱动机器人腿部关节[3-4].MASAHIKO研制了“平面肌肉”机构[5],即钢丝绳在多个带轮上弯曲多次,以产生大速比.DEWEERTH于2010年研制了绳驱动的仿人单腿机器人[6],该机器人有髋、膝关节俯仰两个自由度,采用钢丝绳驱动,该仿人腿机器人结构简单,但并没有研制双足机器人.NAKANISHI等[7]研制出绳驱动骨架机器人KOJIRO,其能够实现站立姿态下的摇摆平衡控制.TOYOTAKA于2011年研制出仿人机器人KENSHIRO[8],该机器人所有关节自由度与人类相同,但无模块化驱动单元,其大腿长0.348 m,质量4 kg,输出角度范围-30°~40°,输出29.4 N[9].NAKANISHI研究室研制了绳驱动仿人机器人KOTARO[10],该机器人采用绳驱动肌肉单元,其双腿仅能单向运动.
人类常速步行着地冲击力为体重的3.5倍,跑步着地冲击为5倍,最大为7倍,刚性驱动难以缓冲机器人在未知环境下进行跳跃或者步行的冲击,挠性驱动可缓解冲击.目前,仅有早稻田大学高西研究室研制出全挠性仿人双足机器人,其步速为0.023 km/h[11];世界上速度最快的刚性驱动机器人步速为9 km/h[12],其无法缓冲很大的冲击载荷.
由于挠性驱动难于控制,所以本文首先采取挠性驱动关节与刚性驱动关节混合驱动机器人的办法研究仿人双足稳定步行问题.在设计研制的FDU-I[13]、FDU-II型挠性驱动单元和所设计单元控制器基础上[14-15],研制一种髋关节带有两个挠性驱动的双足步行机器人,研究其稳定步行控制问题,后续研究逐步增加驱动单元,以实现全部挠性驱动.
1 仿人双足机器人的设计
受到仿生肌腱的启发,利用钢丝绳模拟人类肌腱,并将绳驱动机构设计成模块化挠性驱动单元,该单元类似于人类肌肉的工作方式,钢丝绳拉紧时便可驱动关节运动,同时,钢丝绳的挠性可吸收振动,缓解冲击.将挠性驱动单元用于双足机器人,模拟人类双腿的运动方式,不仅在仿生学上实现类人,也能有效降低机器人受到的外界冲击,从而减小传递到电气部分的振动.为实现仿人肌腱驱动的步行方式,同时验证挠性驱动单元对机器人关节的驱动能力,设计FDUBR-I型仿人双足机器人,由于挠性驱动存在回差和时滞,配置多个挠性驱动的机器人步行控制难度较大,因此并没有将机器人所有关节都配置挠性驱动单元,而是在其双腿髋关节各布置一个挠性驱动单元,用于驱动FDUBR-I的髋关节俯仰自由度.
1.1 机构自由度配置与规格
为研究挠性驱动在双足机器人上的应用,设计10自由度FDUBR-I型仿人双足机器人(三维模型轴测图如图1(a)所示),腿部自由度采用2-1-2配置(自由度配置如图1(b)所示),即髋关节为横滚和俯仰自由度,膝关节为俯仰自由度,踝关节为俯仰和横滚自由度.两个挠性驱动单元分别驱动左、右髋关节俯仰自由度,而且挠性驱动单元设计模块化接口,可作为机器人大腿部件,并方便地与膝关节和髋关节其他部件相连接.FDUBR-I型机器人整机质量22.5 kg,质量分布如图1(c)所示.

图1 机器人三维模型与参数
1.2 挠性驱动单元
FDU-II型挠性驱动单元(如图2)是基于仿生肌腱驱动和动滑轮组增力原理而设计的模块化单元,其长宽高分别为279.0、105.2、107.0 mm;性能测试试验结果表明:该单元具有负载能力大(额定转矩12.6 N·m,此转矩下单元输出转速77.5(°)/s)、频响高(6.1 Hz)、减缓冲击(减缓≥34.5%)等特点,该挠性驱动单元在额定负载下传动与控制误差合计<±0.92°.FDU-II构成如图2(a)所示,其原理图如图2(b)所示.符号*表示钢丝绳固定点.

图2 FDU-ⅠⅠ型挠性驱动单元三维模型及原理图
1.3 机器人其他关节驱动
根据仿真和实验结果,双足机器人横滚关节对驱动能力的要求比俯仰关节的低,但是横滚关节的刚度对于机器人单脚支撑期的稳定步行至关重要.俯仰关节是双足步行中最重要的关节,必须能够输出高转速和大扭矩.
除髋关节俯仰自由度采用FDU-II型挠性驱动单元驱动之外,其他关节均采用DC伺服电机-同步齿形带-谐波减速器的驱动方式.谐波减速器由于高速比、高精度、高刚度而广泛用于机器人系统.各关节驱动能力参数(含FDU-II型挠性驱动单元的参数)如表1所示,挠性驱动单元用来驱动髋关节Pitch自由度.该挠性驱动单元已申请发明专利[13].

表1 关节驱动能力的设计参数
2 仿人双足机器人研制
研制的FDUBR-I型仿人双足机器人整机实物图如图3(a)所示,搭建的FDUBR-I型仿人双足机器人系统实物如图3(b)所示.该双足步行机器人特点是:小型化、轻量化(直立高度为731 mm,整机22.5 kg);具有开放性(可以添加各种传感器,系统拥有预留A/D、IO、串口、PCI接口等).FDUBR-I型仿人双足机器人的计算机控制系统由硬件、软件两部分组成.FDUBR-I型仿人双足机器人控制系统硬件框图如图4所示.

图3 仿人双足机器人

图4 机器人控制系统硬件构成
单块PMAC运动控制卡与上位机通过点对点的以太网进行通信,该通信方式最多只能让一块PMAC板卡同时驱动6个电机,而FDUBR-I型仿人双足机器人搭载10个电机,因此搭建符合IEEE802.3规范的交换式以太网络进行上位机与两块多轴运动控制卡PMAC的通信,其数据传输速率达到10 Mbit/s,经测试,上位机与PMAC通信周期为1.6 ms(从上位机发送数据到PMAC,并从PMAC返回数据到上位机).
编写的FDUBR-I型仿人双足机器人的计算机控制系统软件模块包含运动控制模块和传感器信号处理模块两部分,用于实现机器人的双足稳定步行.利用PMAC运动控制卡的动态链接库PCOMM32.DLL,在Windows XP系统下完成控制系统软件的编写.该软件功能:为上位机与PMAC运动控制卡建立通讯;发送机器人步行控制指令到运动控制卡;接收传感器信号实时显示并存储在上位机.控制系统软件模块框图如图5所示.
PMAC软件包括用于挠性驱动单元的基于黏弹性动力学模型反馈的关节全闭环与张力反馈控制器[14](其原理如图6所示).由于采用钢丝绳传动从而挠性单元具有较大的回差和滞后,且系统频响较低.为解决这一问题,采用一种张力反馈和关节全闭环的控制策略,通过黏弹性动力学模型进行关节位置和关节速度反馈,根据钢丝绳弹性变形进行关节速度和关节加速度的前馈.关节位置误差与速度误差反馈,相当于在电机内部位置环与速度环的基础上引入关节的位置环与速度环.对弹性变形的速度与加速度前馈,其基本思想是通过弹性变形公式[14]可求得钢丝绳伸长量,由伸长量求得需要前馈的速度与加速度,通过实时修改速度前馈系数与加速度前馈系数来达到补偿钢丝绳伸长量的目的.


图6 挠性驱动单元控制器原理[15]
3 仿人双足机器人步行实验
双足步行实验目的:实现带有部分挠性驱动的双足机器人步行;验证挠性驱动对双足机器人的驱动能力;验证基于黏弹性动力学模型反馈的关节全闭环与张力反馈控制器[14-15]对挠性驱动单元的控制作用.分别对挠性驱动单元采用PID伺服跟踪控制、关节全闭环与张力反馈控制的双足机器人步行实验.
3.1 采用PⅠD轨迹跟踪控制的步行实验
首先进行对双足机器人各关节均采用PID轨迹跟踪控制的步行实验.对挠性驱动单元采用关节PID轨迹跟踪控制的步行实验按步速、步数分组进行,步行实验步速序列:0.02、0.04、0.06、0.08 km/h,步速由步长和步行周期决定,每种步速下,再分成3组不同步长、步行周期的实验,步长分别是220、240、260 mm,所有的步行样本是按着文献[16]方法生成,各组均进行了5次步行实验.
机器人步行样本6步(包括起步、2个完整步行周期、完了步),按步速分成5组进行实验,机器人均未完成整个步行过程,各步速下机器人最多能够步行3步,在该系列实验最高步速(0.08 km/h,步长220 mm,步行周期10 s)下分别完成了1步步行1次,2步步行3次,3步步行1次,步行3步的实验视频按时间序列视频截图如图7所示,机器人在第3步未结束时倾覆.

图7 采用PⅠD控制器的步行实验视频截图(光滑瓷砖地面)
FDU-II钢丝绳张力、髋关节俯仰力矩、FDUII关节角、FDU-II关节角误差、FDU-II关节相图分别如图8(a)~(f)所示.髋关节俯仰力矩最大值为15.6 N·m,该冲击力矩也是机器人倾覆时造成的,尽管超出了FDU-II型挠性驱动单元额定力矩(12.6 N·m),但其机械、电气部分仍可正常工作,表明挠性驱动单元额定力矩并非挠性驱动单元的极限输出力矩,其具有一定的过载能力,迈步过程的力矩峰值为8.7 N·m,力矩较大,但未超过挠性驱动单元额定力矩.挠性驱动单元在21 s时刻关节跟随误差为5.2°,在此之前,跟随误差已呈发散趋势,在10~12 s区间内关节跟随误差已达到4.4°.机器人仅步行3步倾覆,机器人在右腿迈步即将结束时,发生了双脚的频繁振荡,产生了较大关节力矩,左、右腿分别出现了从-20.2~-35.8(°)/s、从21.3~36.2(°)/s的速度突变,突变分别达到77%、70%,且双腿髋关节极限环均发生较大偏移,表明机器人挠性关节处于非正常工作状态.
对挠性驱动单元采用PID轨迹跟踪控制的双足机器人步行实验结果表明,机器人挠性驱动关节轨迹跟踪误差较大(5.2°),关节有较大冲击力矩(15.6 N·m),机器人在第3步迈步阶段已经发生倾覆,而机器人采用谐波减速器的关节跟随误差约为1°.实验结果表明:单纯PID轨迹跟踪控制不适用于挠性驱动单元,得不到持续的稳定步行结果.为此,本文进一步进行挠性驱动关节全闭环与张力反馈控制下仿人双足步行机器人持续稳定步行实验.
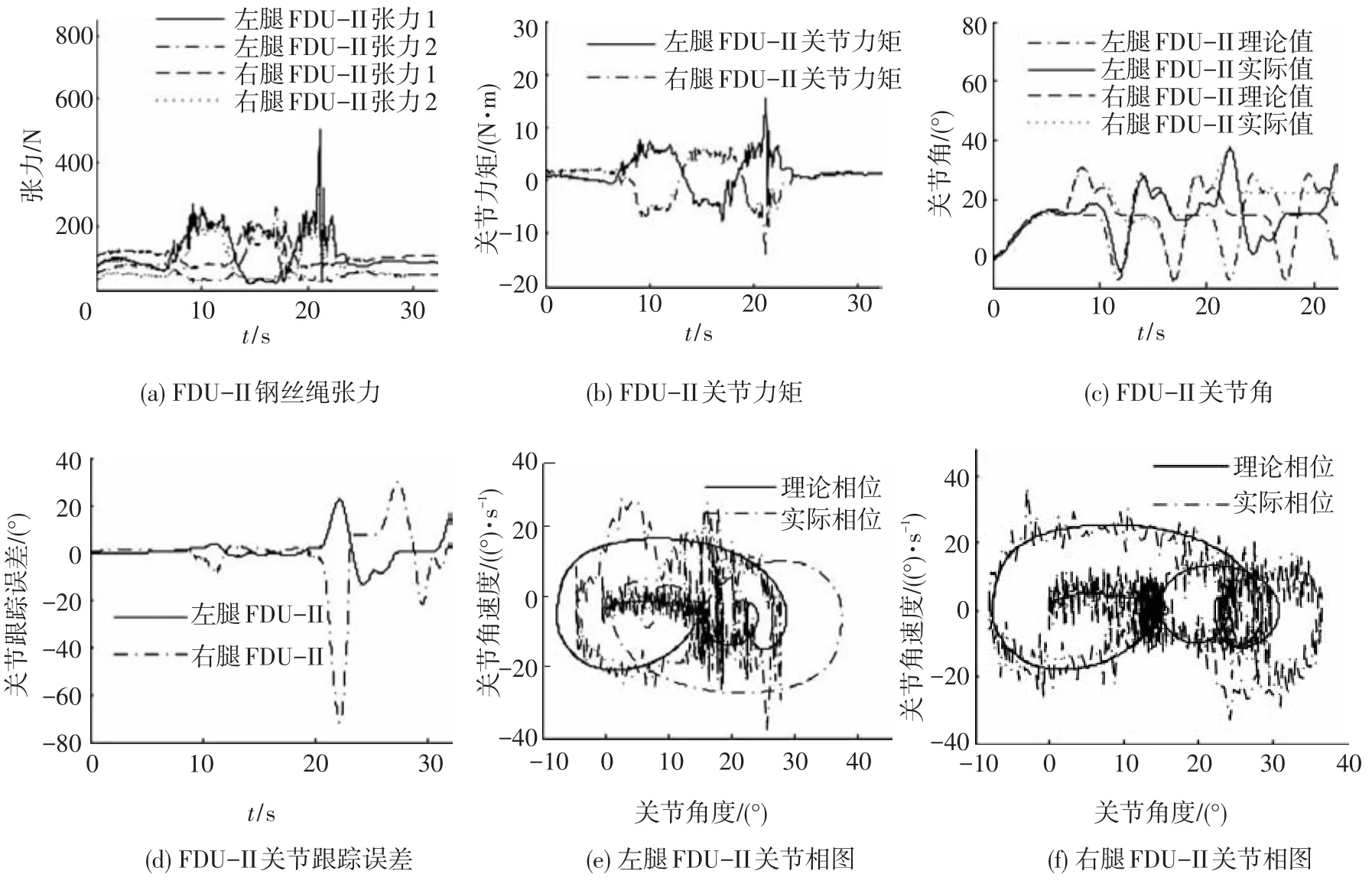
图8 步行实验结果(PⅠD控制)
3.2 采用关节全闭环与张力反馈控制的步行实验
对挠性驱动单元采用关节全闭环和张力反馈控制,分别按3.1小节分组方法进行机器人步行实验.该系列实验下的机器人能够完成各组步行运动,目前步速最大可达0.1 km/h(步长260 mm,步行周期10 s),其实验视频按时间序列视频截图如图9所示.

图9 挠性驱动关节全闭环和张力反馈控制下持续稳定双足步行实验(光滑瓷砖地面)
FDU-II挠性关节(即挠性驱动单元驱动下髋关节)力矩、关节角误差分别如图10(a)~(f)所示.
髋关节俯仰关节两侧钢丝绳牵引力矩最大值为5.2 N·m,未达到FDU-II型挠性驱动单元额定力矩(12.6 N·m)的1/2,具有较大力矩余量,采用PID轨迹跟踪控制力矩为8.7 N·m.关节实际转速最大为29.5(°)/s,仅为FDU-II型挠性驱动单元额定转速(77.5(°)/s)的2/5,该步速下关节转速较低,速度余量较大;FDU-II关节最大跟踪误差为0.89°.
FDU-II驱动单元的关节极限环(如图10(a)、(b)中的大环)呈现周期性循环状态,两腿在完整步行周期内各迈步4次,极限环分别有4个大环,表明机器人在迈复步的步行过程中处于稳定状态,中间的小环为下蹲和起立过程,交叉环为初始和最后的半步,这两个环都是单环.两个挠性驱动单元关节极限环未出现速度峰值点,可知挠性驱动单元关节是稳定的.
采用挠性驱动单元关节全闭环和张力反馈控制,机器人能够实现稳定步行,挠性驱动关节跟随误差较小,钢丝绳所受张力较小,且无较大突变,表明关节全闭环和张力反馈控制器对挠性驱动单元具有良好控制效果.

图10 关节全闭环与张力反馈控制下的步行实验结果
4 结 论
1)设计、研制了10自由度FDUBR-I型仿人双足机器人,该机器人髋关节俯仰自由度由FDU-II型挠性驱动单元驱动,具有小型化、轻量化、开放性等特点.
2)搭建了FDUBR-I型仿人双足机器人控制系统硬件和软件,该控制系统包括FDU-II型挠性驱动单元的张力反馈和关节全闭环控制子系统以及刚性关节轨迹跟踪控制子系统,可实现对双足步行机器人的在线实时控制.
3)进行了FDUBR-I型仿人双足机器人稳定步行实验,机器人步速可达0.1 km/h(日本早稻田大学于2012年研制的绳驱动机器人步速为0.023 km/h[11]),步行实验结果表明关节全闭环和张力反馈控制器对双足机器人具有频响高、跟踪误差小及有效减缓冲击力等良好控制效果,挠性驱动单元对双足机器人具有足够的驱动能力.
4)对于实现的0.1 km/h步速,FDU-II型挠性驱动单元尚余有额定力矩的1/2、额定输出转速的3/5的驱动能力,且该步速下各关节中实际所需驱动力矩最大(12 N·m)关节为膝关节,表明所研制的FDUBR-I型仿人双足机器人尚有提高步速的潜力,而且FDU-II型挠性驱动单元也有能力作为其膝、踝关节使用.同时也意味着所有关节皆采用挠性驱动方式在稳定步行控制上可能会更加困难、复杂,富有挑战性.
5)作为下一步研究工作,今后将由2个挠性驱动单元逐步增加至4~10个、研制以挠性驱动为主乃至全部采用挠性驱动单元驱动的仿人双足步行机器人,进行挠性驱动控制理论与抗大冲击试验研究.
[1]ABE K,SUGA T,FUJIMOTO Y.Control of a biped robot driven by elastomer-based series elastic actuator[C]//IEEE International Workshop on Advanced Motion Control.Piscataway:IEEE,2012:1-6.
[2]MASAHIKO O,NOBUYUKI I,YUTO N,et al.Stiffness readout in musculo-skeletal humanoid robot by using rotary potentiometer[C]//IEEE Sensors.Piscataway:IEEE,2010:2329-2333.
[3]NAKANISHI Y,ITO N,SHIRAI T,et al.Design of powerful and flexible musculoskeletal arm by using nonlinear spring unit and electromagnetic clutch opening mechanism[C]//IEEE-RAS International Conference on Humanoid Robots.Piscataway:IEEE,2011:377-382.
[4]NAKANISHI Y,IZAWA T,KUROTOBI T,et al.Achievement of complex contact motion with environments by musculoskeletal humanoid using humanlike shock absorption strategy[C]//IEEE/RSJ International Conference on Intelligent Robots and Systems.Piscataway:IEEE,2012:1815-1820.
[5]OSADA M,IZAWA T,URATA J,et al.Approach of“planar muscle” suitable for musculoskeletal humanoids,especially for their body trunk with spine having multiple vertebral[C]//IEEE-RAS International Conference on Humanoid Robots.Piscataway:IEEE,2011:358-363.
[6]MIGLIORE S A,TING L H,de WEERTH S P.Passive joint stiffness in the hip and knee increases the energy efficiency of leg swinging[J].Autonomous Robots,2010,29(1):119-135.
[7]MIZUUCHI I,NAKANISHI Y,SODEYAMA Y,et al.An Advanced Musculoskeletal Humanoid Kojiro[C]//IEEE-RAS International Conference on Humanoid Robots.Piscataway:IEEE,2007:294-299.
[8]KOZUKI T,MIZOGUCHI H,ASANO Y,et al.Design methodology for the thorax and shoulder of human mimetic musculoskeletal humanoid Kenshiro-a thorax structure with rib like surface[C]//IEEE/RSJ International Conference on Intelligent Robotsand Systems.Piscataway:IEEE,2012:3687-3692.
[9]ASANO Y,MIZOGUCHI H,KOZUKI T,et al.Lower thigh design of detailed musculoskeletal humanoid“Kenshiro”[C]//IEEE/RSJ International Conference on Intelligent Robots and Systems.Piscataway:IEEE,2012:4367-4372.
[10]MIZUUCHI I,NAKANISHI Y,NAMIKI Y,et al.Realization of standing of the musculoskeletal humanoid kotaro by reinforcing muscles[C]//IEEE-RAS International Conference on Humanoid Robots.Piscataway:IEEE,2006:176-181.
[11]HASHIMOTO K,TAKEZAKI Y,MOTOHASHI H,et al.Biped walking stabilization based on gait analysis[C]//IEEE International Conference on Robotics and Automation.Piscataway:IEEE,2012:154-159.
[12]KAMIDE H,MAE Y,TAKUBO T,et al.Direct comparison of psychological evaluation between virtual and real humanoids:Personal space and subjective impressions[J].International Journal of Human-Computer Studies,2014,72(5):451-459.
[13]吴伟国,侯月阳.具有张力和关节位置反馈的机器人关节用挠性驱动单元:中国,201410257786.5[P].2014-06-11[2014-09-22].http://www.drugfuture.com/cnpat/cn-patent.asp.
[14]WU Weiguo,HOU Yueyang.Controller design and experiment based on viscoelasticity dynamics model for a flexible driveunit[J].JournalofCentralSouth University of Technology,2014,21(12):4468-4477.
[15]吴伟国,侯月阳.具有张力和关节位置反馈的机器人关节用挠性驱动单元控制方法:中国,
201410494011.X[P].2014-09-12[2014-09-22].http://www.drugfuture.com/cnpat/cn-patent.asp.
[16]WU WEIGUO,HOU YUEYANG.Research on rapid walking of biped robot based on parametric surface table cart model[C]//IEEE International Conference on Robotics and Biomimetics.Piscataway:IEEE,2009:463-468.
猜你喜欢
保健与生活(2023年21期)2023-10-26 03:34:13
中华老年多器官疾病杂志(2021年5期)2021-05-27 10:46:26
中国老年学杂志(2021年23期)2021-03-29 20:15:03
World Journal of Clinical Cases(2020年12期)2020-09-15 08:58:30
南昌大学学报(医学版)(2020年3期)2020-08-17 01:33:42
重型机械(2019年3期)2019-08-27 00:58:48
测控技术(2018年5期)2018-12-09 09:04:28
电子制作(2018年9期)2018-08-04 03:31:12
为了孩子(孕0~3岁)(2017年1期)2017-01-13 17:54:54
浙江大学学报(工学版)(2016年9期)2016-06-05 09:20:55