
基于机器视觉的前照灯拐点检测与研究
2015-09-13 11:44顾启民
制造业自动化 2015年19期
崔 明,顾启民
(1.常熟理工学院 电气与自动化工程学院,常熟 215500;2.中国矿业大学 信息与电气工程学院,徐州 221116)
0 引言
前照灯是夜间行车照明的主要电气设备,对行车安全有着重要作用,其中前照灯的光束照射位置是车辆安全检测的必检项目[1]。前照灯的光束照射位置又称近光图像的拐点,其测量精度将影响前照灯技术参数的确定。我国采用欧洲的ECE标准,使用具有明暗截止线的非对称近光前照灯[2]。
典型的前照灯近光配光特性如图1所示,几何形状不规则,并具有模糊的明暗截止线。明暗截止线分水平轴和倾斜轴两部分,其中倾斜轴与水平轴有约15°的夹角,在明暗截止线的右下方有一个亮区。近光检测的关键是明暗截止线的检测以及拐点的定位[3,4]。

图1 近光配光特性图
1 前照灯检测的硬件系统设计
汽车前照灯检测技术,从早期的屏幕观察法发展到现在的CCD感光检测法。随着汽车前照灯逐渐由双光束单光轴向双光束双光轴发展,传统的前照灯检测方法逐渐被取代,CCD感光检测法成为前照灯检测的主流。CCD感光检测法是利用CCD的感光技术,将采集到的光信号转化为电信号,然后通过图像采集卡对模拟的电信号进行模数转换,将数字信号输出到计算机,由计算机进行数据处理,就可测出前照灯的拐点信息[5,6],硬件结构如图2所示。
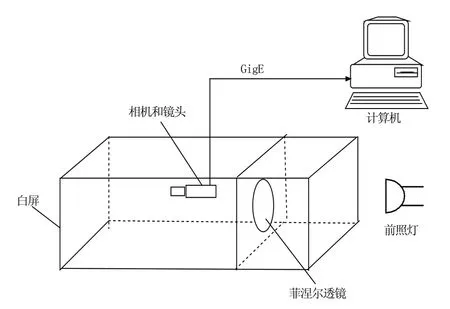
图2 检测系统硬件组成
1)CCD摄像机及镜头。根据实际检测需求,选用Basler型号为acA1300-30gm的工业相机以及一个焦距为12mm的computar摄像头,相机接口为Gige,采用千兆以太网通讯协议进行图像传输。其中镜头焦距的选择是由实际工作距离决定的。
2)菲涅尔透镜。菲涅尔透镜是个薄透镜, 对前照灯发出来的光线进行聚焦,极大地缩短了近光图像的成像距离。
3)白屏。是近光灯发出来的光线经过菲涅尔透镜聚焦之后的成像面。
4)计算机。快速处理图像信息,控制外围设备,输出检测结果等,一般采用高性能的工控机。
2 前照灯拐点的检测算法
由于制造工艺外界环境等因素的影响,实际采集得到的近光图像明暗截止线比较模糊。如何快速准确地完成边缘点的检测和拐点的定位,是检测算法的主要工作。针对近光灯配光特性的特点和实际的硬件环境,采取图像采集、提取ROI、图像预处理、边缘检测、线性拟合等步骤对近光灯图像进行处理和拐点检测,具体过程如图3所示。

图3 检测算法流程图
2.1 图像采集
图像采集是进行图像处理的前提,在LabVIEW的视觉函数模块里,提供了低速采集模式和高速采集模式[7],为了实现前照灯拐点的实时快速检测,本系统采用高速采集模式。LabVIEW视觉子模块NI-IMAQdx中提供了图像采集的各种子VI,包括相机的打开和配置、采集图像、关闭相机等子VI模块。
2.2 提取ROI
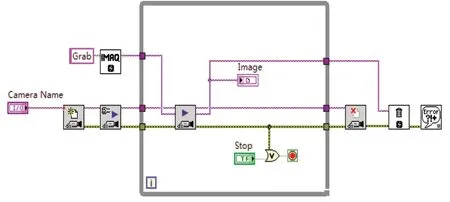
图4 图像采集程序
ROI(Region of interesting)是指感兴趣区域,一般用于获取图像中的特定区域,以便后续的图像处理和分析。理论上相机和镜头的选型是由视场和工作距离决定的,理想的情况下应该让感兴趣的区域尽量充满整个视野。实际调查中发现前照灯在检测过程中不仅要考虑近光图像视场的大小,还要综合考虑其他因素,近光图像感兴趣的区域可能只占视场的一部分。对前照灯的位置进行校准后,拐点的移动范围由前照灯自身决定,根据前照灯拐点移动的范围,我们以图像中心为基准,设置一个大小为374×324的矩形ROI。可以通过LabVIEW中的函数IMAQ Convert Rectangle to ROI设置矩形ROI,得到的ROI区域如图5所示。

图5 图像ROI
2.3 图像预处理
图像噪声是指图像中各种妨碍人们对其有用信息接受的因素。图像在采集和传输过程中可能会受到内外部的干扰,因此通常需要对采集到的图像进行特定的图像预处理,得到更适合后续处理的图像,提高检测的精度。
图像的去噪声方法有均值滤波、中值滤波、小波去噪等方法。由图5可以看出近光灯图像的明暗变化是有规律的,为了避免噪声点对图像的干扰,本文采用中值滤波法去除图像中的噪声点,提高图像的信噪比,图像中值滤波的程序如图6所示。
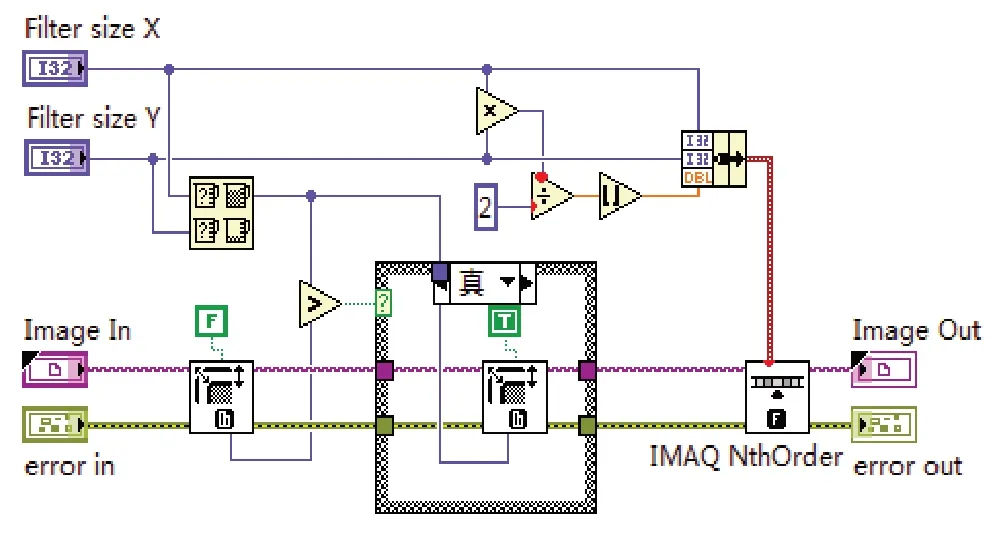
图6 图像中值滤波
2.4 边缘检测
前照灯近光图像边缘存在“是边缘又不是边缘”的模糊性,给边缘提取带来了很大的难度。目前,在近光图像边缘检测上,应用较广的有阈值分割法和梯度法。阈值分割法先对图像进行二值化,再进行边缘检测。梯度法先对过图像预处理,再根据像素点的梯度信息确定边缘点。文献[8]提出了一种模糊增强的边缘检测方法,达到了图像增强和边缘检测的目的。文献[9]提出了一种利用先验条件来提取水平和倾斜边缘点的方法。许多的改进型算法因其复杂性和较大的计算量而不能在工程应用中得以推广。研究发现近光灯图像(明暗截止线附近)在垂直方向上自上而下呈现渐亮的趋势,基于这种配光特性,本文提出一种基于阈值插值的边缘检测法。设图像函数为f(i,j),扫描第i列像素,如果满足:
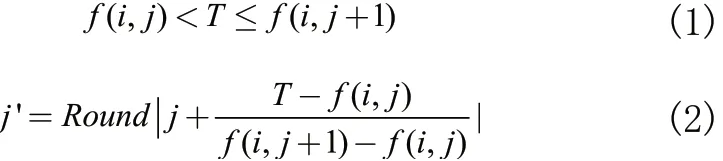
则取f(i,j')作为第i列的边缘像素点,其中图像的大小为M行N列,,Round为四舍五入运算,T为设定的固定阈值。基于阈值插值的边缘检测法本质上属于一维线性插值法,主要适用于图像在某一方向上具有渐进变化的情况。它的主要优点是检测出的边缘更加平滑,无干扰噪声,更符合实际的情况。鉴于图像边缘的模糊性,采用梯度法无法获取有效的边缘信息。图7显示了运用阈值分割法和阈值差值法对图像进行边缘检测的效果,可以看出相比阈值分割法,运用阈值差值法处理得到的图像无异常的噪声像素点,而且图像边缘轮廓更加清晰。

图7 边缘检测
2.5 线性拟合与拐点检测
线性拟合与拐点检测主要包括三部分内容:寻找并识别水平和倾斜的边缘点、对水平和倾斜的边缘点进行线性拟合和拐点检测。
由图7可以看出明暗截止线在水平和倾斜部分的斜率都是变化的,而拐点的位置恰好在亮区域附近。本文首先采用Blob分析法定位拐点所在的边缘点区域,然后运用梯度法搜索水平和倾斜边缘点的分界点,具体识别算法如下:
1)采用Blob分析法识别出亮区域的位置,提取出亮区域附近的边缘点。
2)设定坐标增幅阈值Th。
3)对提取出的边缘点,从左向右对相邻两列像素的行坐标进行比较,如果某点之后连续多点的增幅都不小于阈值Th,则判断该点为水平和倾斜边缘的分界点。
4)分界点左侧的像素为为水平边缘点,分界点右侧的像素为倾斜边缘点。
可以通过LabVIEW中的IMAQ Count Objects函数设置固定阈值分割白色区域,并计算出白色区域的轮廓和质心,检测结果如图8所示[10]。

图8 亮区域检测
识别出水平和倾斜边缘点之后,需要将边缘点拟合成水平和倾斜边缘线。常用的直线检测方法有Hough变换法和最小二乘法[11]。由于Hough变换计算量比较大,实际中应用较少,拟采用运算量较小的最小二乘法对水平和倾斜边缘点进行线性拟合。最小二乘法是一种在方差意义下对实验数据实现最佳拟合的方法。利用最小二乘法对水平和倾斜边缘点进行线性拟合,对拟合得到的两条直线求交点,即可得出拐点的位置坐标,LabVIEW中的线性拟合函数可以对输入的离散点进行线性拟合,检测结果如图9所示。
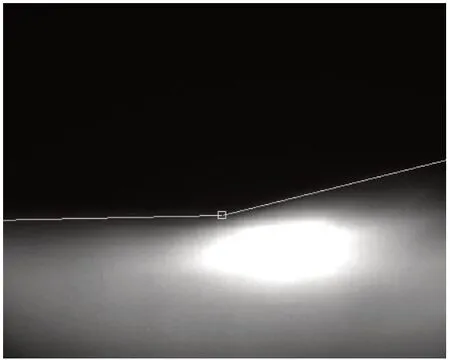
图9 线性拟合和拐点检测
3 实验结果与分析
根据硬件设计的结果搭建如图10所示的实验装置,在采集近光灯图像之前要对前照灯的位置进行校准,保证菲涅尔透镜中心与被检测前照灯的发光体中心在水平及垂直坐标系上重合。对准的目的主要是使发光体的光尽可能多的进入受光箱,因为菲涅尔透镜的大小是一定的。
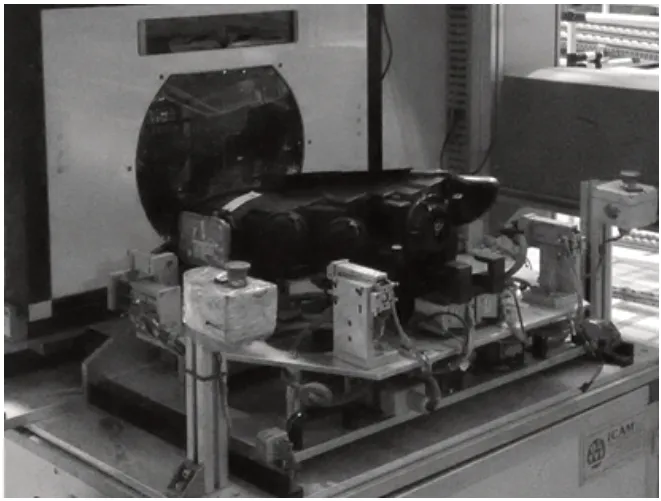
图10 检测系统实验装置
基于LabVIEW的生产者消费者模型,开发了前照灯拐点检测的软件系统,对图像实时采集并处理[12]。图像的实时采集程序采用基于事件驱动的框架,减轻了CPU的负担。软件系统分两种工作模式:手动模式与自动模式。手动模式手动采集和处理图像,自动模式实时采集并处理图像。
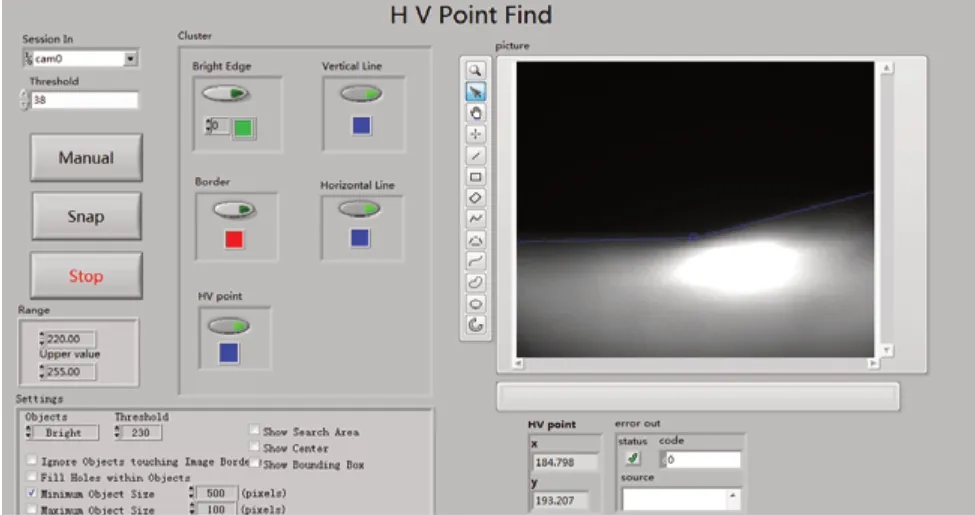
图11 软件界面
实验运行环境CPU为Inter Core i5-2430M,2.40GHz,内存为4GB,操作系统为Windows7,实验数据显示,单帧图像从采集到处理的时间为0.25s,图像处理的时间可以满足工业检测的要求。为验证系统的稳定性,在实时采集模式下,每隔0.5s记录一次拐点的位置,重复检测20次,由图12所示结果看,拐点的坐标误差范围在3个像素以内,当前相机的空间分辨率为0.123mm/pixel,即拐点误差为0.369mm,可见算法的稳定性较好。
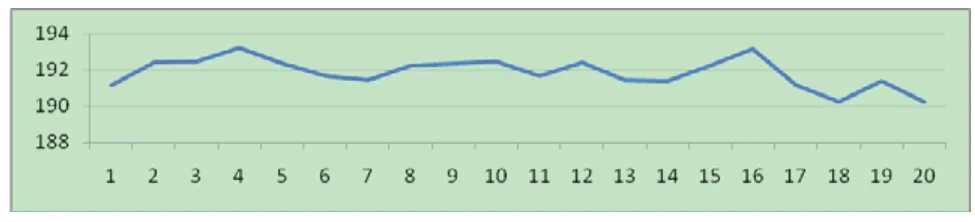
图12 拐点位置重复性检测
4 结论
本文通过对前照灯近光拐点的检测技术进行研究,提出了一种基于阈值插值的方法,提高了边缘检测的抗干扰性;为了提高拐点的定位精度,提出了一种Blob分析法和梯度法相结合的策略来检测水平和倾斜边缘分界点。最后基于LabVIEW的生产者消费者模型开发了一套前照灯近光拐点检测系统。实验表明该系统的检测速度快,稳定性好,可以满足前照灯拐点的检测要求。
[1] 金晅宏,戴曙光,穆平安.视术觉技在车灯光轴交点检测中的应用研究[J].仪器仪表学报,2001,22(3):266-268.
[2] 陆艺.机动车前照灯检测仪校准器检测系统的研制[D].成都:四川大学,2003.
[3] 张勇.基于图像处理的汽车前照灯检测系统的研究[D].长春:长春理工大学,2006.
[4] 赵亚南,李业德.Sobel算子和最小二乘法在汽车前照灯近光检测中的应用[J].计算机与网络,2009,45(30):240-244
[5] 朱柳建.基于图像处理的汽车前照灯检测技术的研究[D].南京:南京林业大学,2005.
[6] Bevilacqua.A.,Gherardi.A,Carozza, L.An industrial visionbased technology system for the automatic test of vehicle beams ,Industrial Electronics ,2009,(1): 2178-2183.
[7] Christopher G R. Image Acquisition and Processing with LabVIEW[M].Boca Raton: CRC Press,2004.
[8] 云颖.汽车前照灯全自动视觉检测系统[D].上海:上海理工大学,2009.
[9] 汪洲燕.汽车前照灯在线调整检测系统的研究[D].杭州:浙江大学,2007.
[10] Thomas K.Image Processing with LabVIEW and IMAQ Vision[M].Upper Saddle River:Prentice Hall PTR,2003
[11] 何扬名,戴曙光.Hough变换在车灯光轴交点检测中的应用[J].计算机工程与应用,2009,45(30):240-244
[12] 龙云,李小明,向建化.基于LabVIEW的视觉检测系统软件框架设计[J].机电工程技术,2013,42(6):141-143.
猜你喜欢
艺术品鉴(2020年4期)2020-07-24
汽车与新动力(2019年5期)2019-11-07
艺术品鉴(2019年8期)2019-09-18
汽车维护与修理(2018年7期)2018-10-13
红岩春秋(2017年6期)2017-07-03
通信产业报(2016年44期)2017-03-13
汽车维护与修理(2016年4期)2016-11-26
汽车零部件(2014年7期)2014-06-23
汽车电器(2014年8期)2014-02-28
雕塑(1999年2期)1999-06-28
