
某大型米波雷达天线车的机动性设计*
2015-09-08 10:16周红,樊雷
电子机械工程 2015年4期
周 红,樊 雷
(成都中电锦江信息产业有限公司, 四川 成都 610051)
某大型米波雷达天线车的机动性设计*
周 红,樊 雷
(成都中电锦江信息产业有限公司, 四川 成都 610051)
米波相控阵雷达具有天线口径大、质量重、天线需分块运输的特点,其机动性设计是个难题,其中天线车的快速架设和撤收是需要解决的重点和难点。文中通过对某大型米波雷达天线车系统进行集成化设计,对面阵天线进行合理分块并选择适合的折叠方式,设计并使用天线翻转、折叠、锁紧等自动架设/撤收机构,运用MSC.ADAMS运动分析软件对各机构进行仿真分析和优化设计等,使该雷达天线车的机动性达到了指标要求,并已通过整机工程实施对其进行了验证。该设计可供同类大型雷达车的机动性设计参考。
米波雷达天线车;机动性;结构设计
引 言
在现代战争环境中,地面雷达面临着电子干扰、隐身飞机、反辐射导弹及超低空突防的严重威胁,而提高雷达的机动性是对付这“四大威胁”、提高雷达生存能力的有效手段之一,高机动性已成为地面雷达发展的必然趋势[1-2]。
雷达的机动性一般是指其快速隐蔽或快速转场、易地架设并重新开机工作的能力[1]。雷达的机动性与电讯性能、机械性能都有密切的关系,应进行科学的综合设计,从总体方案开始即明确定位,合理取舍[3]。提高雷达机动性的途径通常有:对天线进行合理的分块,采用合适的折叠方式,合理划分运输单元;采用自动架/撤技术;结构上采用模块化、集成化设计;充分利用各种连杆机构、快锁机构等[4-5]。
因工作频率低,天线阵面大,阵子数目多,需分离运输,装、拆及转场困难,米波雷达的机动性一般都不高,其架、拆工作往往需要十几个人数小时才能完成。然而现代战争迫切需要米波雷达具备机动能力,甚至高机动能力[1]。文中从集成化设计、运输设计、架设/撤收机构设计及仿真等方面介绍了某大型米波雷达天线车的机动性设计。
1 集成化设计
某大型米波雷达天线阵面宽15 m、高19 m,阵面上需安装二次雷达天线、发射、波控、接收等设备,重量达27 t,要求架设/撤收时间为1 h/16人。针对该雷达天线口径大、质量重、机动性要求高等特点,采用集成化设计,具体措施如下:
1)二次雷达天线与面阵天线采用一体化设计,二次雷达天线嵌入安装在面阵天线底端的骨架内。
2)设计一个高频箱,将固态发射机、波控器、接收前端、二次雷达主机、电源等设备装入高频箱。高频箱与天线骨架实行一体化设计。
3)馈线系统(包括三端环行器、发射列馈、行组件单元、和差网络、和差形成组件等)均安装在天线骨架内,通过电缆与高频箱内的接收前端与波控器连接,需分离的电缆尽量采用快速连接装置。
4)转台天线方位动力传动采用三相交流异步电机与减速器合一的齿轮马达,安装在天线车底盘上。测角元件采用旋转变压器。中频汇流环和差动汇流环安装在回转机构中心。
5)天线车采用半挂车,有4条调平腿、2条辅助腿和4条抗倾覆腿。天线翻转、折叠、锁紧、对接及天线车调平采用机、电、液一体化系统,共用一个液压源。
6)设置液压升降平台,可维修高频箱内的设备。
天线车的工作状态如图1所示。

图1 天线车工作状态示意图
2 运输设计
为满足运输要求,该雷达天线采用分块式设计。天线沿宽度方向分成3块,即左边块、中块和右边块。左边块沿宽度方向再分成3块,即左边块Ⅰ、Ⅱ、Ⅲ,左边块Ⅲ沿高度方向再分成上下2块。右边块的分块方式与左边块相同。天线中块沿高度方向分成上下2块。左(右)边块可折叠,其Ⅰ、Ⅱ、Ⅲ 3块之间用折叠机构和锁紧机构连接。中块可折叠,其上下2块间用中块翻转机构和锁紧机构连接。机构布置的原则是在满足要求的前提下尽量减少机构数量,并尽可能地减小机构对天线单元的影响。天线分块及机构布置如图2所示。

图2 天线分块及机构布置图示意图
左、中、右3块分别由3个半挂车运输。需要运输时,左(右)边块Ⅰ、Ⅱ、Ⅲ沿宽度方向自动折叠,天线整体倒伏后,边块与中块分离并安放到边块天线车上。天线中块沿高度方向自动折叠后直接固定在中块天线车上。天线车的公路运输状态如图3所示。

图3 天线车公路运输状态图
3 架设/撤收机构设计
为缩短雷达天线车的架设/撤收时间,设计了一套机、电、液一体化系统,采用人-机交互方式进行自动控制,可实现天线的翻转、折叠、对接、锁紧和天线车的调平,完成天线车运输状态和工作状态的相互转换。系统中架设/撤收机构的设计直接影响到架设/撤收时间和系统的可靠性,因而显得很重要。文中采用MSC.ADAMS运动分析软件对机构进行了仿真分析和优化设计。
3.1天线折叠机构
为完成天线边块180°折叠,设计了折叠机构。该机构主要由主阵面支耳、边块阵面支耳、支撑杆、连杆和驱动缸等组成。它采用新颖的平面双曲柄四连杆机构,油缸为该机构的动力源,用1只缸推动即可实现边块天线大角度的折叠运动。
对折叠机构中油缸的安装距、行程、动作时间、受力等进行仿真和优化设计,以使该机构结构简单,折叠角度大,角度可微调,受力合理,到位准确可靠。边块天线设计为直立状态下折叠,铰链为边块的主要重力承受点,折叠机构不承受主要重力,机构与铰链同轴安装在边块Ⅰ、Ⅱ之间和边块Ⅱ、Ⅲ之间。
折叠机构及其仿真示意图如图4所示。折叠油缸的设计参数见表1。图5为天线边块展开示意图。

图4 折叠机构及其仿真示意图

表1 折叠油缸设计参数
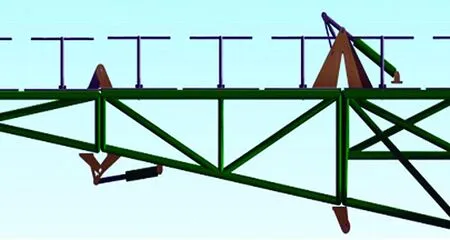
图5 天线边块展开示意图
3.2天线锁紧机构
边块天线展开后,相邻面阵需锁紧。为实现快速可靠的锁紧,设计了锁紧机构。该机构主要由单双支耳、基座、油缸、定位销、接近开关等组成。通过控制油缸推动定位销,可实现相邻面阵的锁紧/解锁。锁紧时,定位销滑行在支耳孔内,到达接近开关1处时,接近开关发信号,表示锁紧到位,系统停止油缸运行,执行下一步动作;解锁时,当定位销滑行到接近开关2处时,接近开关发信号,表示解锁到位,系统停止油缸运行,执行下一步动作。
本文对锁紧油缸的行程、外径、缸径、杆径及锁紧/解锁力等进行了仿真和优化设计,以使该锁紧机构结构简单,锁定/解锁可靠。图6为锁紧机构示意图。锁紧油缸的设计参数见表2。

图6 锁紧机构示意图

表2 锁紧油缸设计参数
3.3天线翻转机构
3.3.1 中块天线翻转机构
中块天线进行状态转换需进行180°折叠。以距天线底端7 m处为界,分为上下2个部分,设计对称分布的2组翻转机构,分别由上下2只油缸和1个三角架组成。中块折叠时,双侧2只下油缸同步驱动,完成中块天线90°运动,然后双侧2只上油缸同步驱动,接力完成中块天线180°的对折。采用MSC.ADAMS软件进行设计及仿真分析,在保证翻转角度的前提下,对油缸的安装距、行程及受力都进行了优化设计。该机构结构简单,翻转角度大,受力合理,变形较小。图7为中块翻转机构及其仿真示意图。中块翻转油缸的设计参数见表3。

图7 中块翻转机构及其仿真示意图
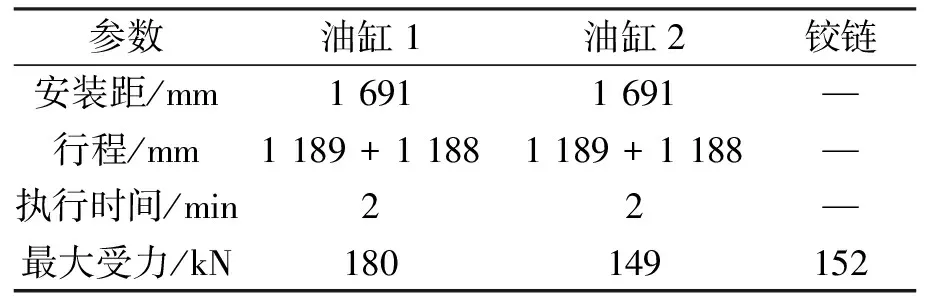
表3 中块翻转油缸设计参数
3.3.2 面阵天线翻转机构
整个面阵天线重27 t,需完成90°举升和倒伏。为减小油缸长度并使其受力合理,采用双级油缸,一级缸缸径大,在面阵起竖、所需举升力较大时进行推动。二级缸缸径较小,在天线举升至40°时接力举升,完成整个天线的90°举升。面阵翻转机构设计为双侧推动,对油缸的安装距、行程、受力等都进行了仿真优化。该机构结构紧凑,受力合理。面阵翻转机构及其仿真示意图如图8所示。面阵翻转油缸的设计参数见表4。

图8 面阵翻转机构及其仿真示意图

表4 面阵翻转油缸设计参数
3.4天线自动对接平台
为解决边块天线与中块天线的快速对接难题,设计了一套六自由度自动对接平台,安装在边块天线车上。该对接平台由4只调平油缸、2组平行四边形举升机构、车长和车宽方向2组平推机构、1个方位轴承、位置测量和检查装置等设备组成,可实现边块天线在空间6个自由度上的位置调节,待边块和中块最终准确对位后,由锁紧机构完成自动锁紧。该对接平台为独创性设计,详细设计见文献[6]。图9为天线对接平台示意图。

图9 天线对接平台示意图
4 结束语
该大型米波雷达天线车的机动性设计,采用了自主创新的多项设计,通过天线车上设备的集成化设计,新颖的天线分块、折叠方式,独创的面阵天线翻转、折叠、锁紧、对接平台等自动化机构,成功解决了该雷达天线车的机动性设计难题。该设计通过了整机工程验证,使该雷达的架设/撤收时间达到了指标要求,取得了较好的效果,可供大尺寸平面阵列雷达天线车的机动性设计参考。
[1] 曹长虹. 米波高机动雷达的结构设计[C]// 2008年电子机械与微波结构工艺学术会议论文集. 南昌: 中国电子学会电子机械工程分会, 2008.
[2] 赵德昌. 地面高机动雷达结构总体设计探讨[J]. 电子机械工程, 2007, 23(3):19-23.
[3] 胡长明, 罗超人. 从结构总体设计角度探讨提高地面雷达机动性的方法[J]. 电子机械工程, 1999(5): 11-14, 60.
[4] 程辉明, 许统融. 地面高机动雷达集成化设计技术[J]. 电子机械工程, 2005, 21(3): 22-23, 27.
[5] 林有才. 高机动地面雷达的现状和未来发展趋势[J]. 电子科学技术评论, 2004(6): 35-38.
[6] 周红, 樊雷, 黄珲. 大型雷达天线六自由度自动对接平台设计[J]. 电子机械工程, 2014, 30(5): 25-28.
周 红 (1964-),女,高级工程师,主要从事雷达总体结构设计工作。
樊 雷 (1979-),男,高级工程师,主要从事雷达总体结构设计工作。
声明
为适应我国信息化建设,扩大本刊以及作者的知识信息交流渠道,本刊已被封面上的数据库全文收录,其作者文章著作权使用费与本刊稿酬一次性付给。如作者不同意文章被收录,请在来稿时向本刊申明,本刊将作适当处理。
MobilityDesignofaLargeMBRAntennaVehicle
ZHOUHong,FANLei
(JinjiangInformationIndustryCo.,Ltd.ofCEC,Chengdu610051,China)
The meter-wave band radar (MBR) is characterized by big mass and the large-area antenna which must be packed up into several units for transportation. Its mobility design is the difficult problem of the radar engineering, especially the fast erecting and dismantling of the antenna vehicle. Design of a MBR antenna vehicle system is introduced in this paper, such as integrated design of the system, reasonable division and proper folding of the antenna array, the design of the automatic erecting and dismantling mechanism including the overturning, folding, locking mechanism etc. Simulation and optimization design are carried out by MSC.ADAMS. The test shows that the mobility of the radar meets the requirement. This design can be used as a reference for the mobility design of the similar large radar vehicle.
MBR antenna vehicle; mobility; structure design
2015-04-13
TN820.8
:A
:1008-5300(2015)04-0020-04
猜你喜欢
冶金设备(2020年2期)2020-12-28
数学小灵通(1-2年级)(2020年9期)2020-10-27
当代贵州(2019年41期)2019-12-13
纤维复合材料(2018年2期)2018-12-07
摄影之友(影像视觉)(2017年11期)2017-11-27
中国共青团(2015年7期)2015-12-17
现代电子技术(2014年23期)2014-12-13
汽车零部件(2014年5期)2014-11-11
新媒体研究(2014年13期)2014-07-31
筑路机械与施工机械化(2014年3期)2014-03-01
