
弹簧参与的微小振动一定是简谐运动吗
2015-09-03 10:59:30闫诚实王靖淇崔景凤
物理与工程 2015年3期
郭 敏 闫诚实 王靖淇 崔景凤 戴 瑞
(1东北师范大学物理学院,吉林长春 130024;2沈阳市第四中学,辽宁沈阳 110023)
1 简谐运动的充要条件
在一维情况下,振子系统的位置可用单一坐标变量x来表示,设任意系统的势能为U=U(x),受力为f=f(x),若x0为稳定平衡位置,则有

一般情况下,在平衡位置附近(Δx=x-x0极小),可以将势能函数展开为泰勒级数[1]:
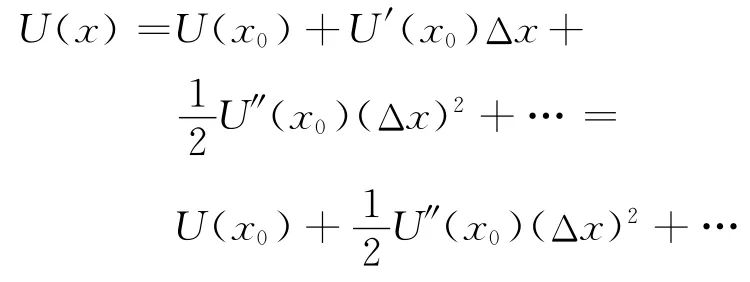
当Δx→0时,若忽略高阶无穷小,则

根据机械能守恒定律有

两侧同时对时间求一阶导数有
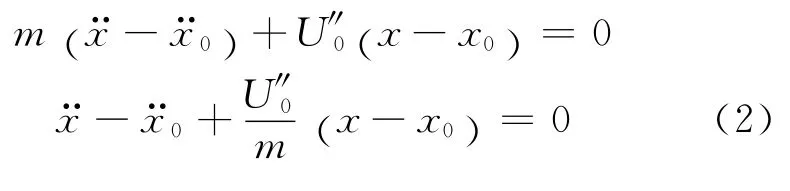
若
此时系统势能为极小值.
需要说明,当式(3)不成立时,如果势能对位置的高阶变化率满足大于零,即那么x0处也是系统的稳定平衡位置,但此时f(x)可能不再满足f(x)=-kx这种形式,这样的振动也就一定不是简谐运动了[4].
2 弹簧参与的微小振动
例1如图1所示,一个原长为l劲度系数为k的弹簧,将其一端固定,另一端连接质量为m中心穿有小孔的质点小球,小球套在光滑的水平细刚性杆上,刚性杆到弹簧固定端的距离刚好等于弹簧的原有长度l.以平衡位置为坐标原点O,建立如图所示坐标轴Ox.外力作用下,小球偏离平衡位置,静止于x处,某一时刻,突然撤去外力,系统沿光滑的水平刚性细杆作微小振动[5].
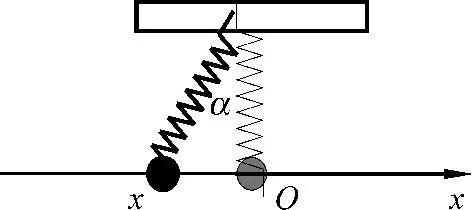
图1 套在水平刚性细杆上的弹簧振子
系统的弹性势能可以表示为
弹簧的伸长量为

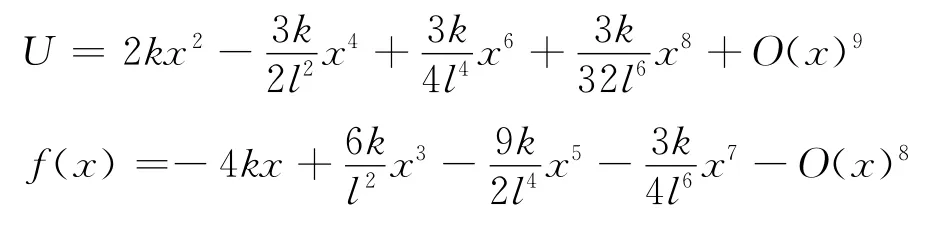
由于小球的横向位移x≪l,将势能在x=0处展开有
例2光滑水平面上一个质点小球连接两个原长均为l、劲度系数均为k的弹簧,将弹簧的另外两端分别固定,使弹簧处于原长,并与质点小球在同一直线,以平衡位置为坐标原点O,建立如图2(a)所示的坐标轴Ox.在外力作用下,小球偏离平衡位置,如图2(b)所示,静止于x处,某一时刻,突然撤去外力,系统将在光滑平面上沿x方向作微小振动[6].
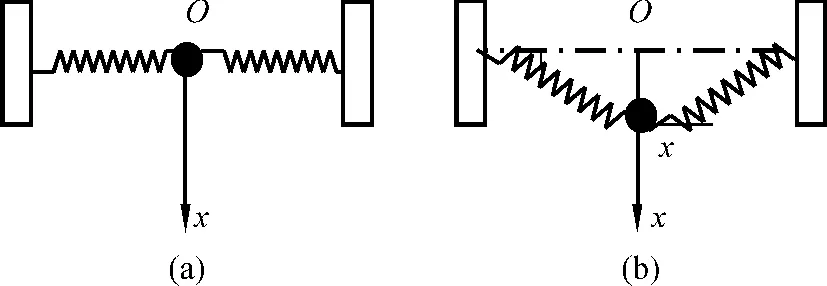
图2 两个弹簧相连的系统
系统的势能为

进行泰勒级数展开得
例3若在例2的基础上再加一个弹簧,3根劲度系数为k,原长为l的弹簧互成120°就得到如图3所示的系统,平衡时各弹簧均恰好为原长.以平衡位置为坐标原点O,建立如图所示的坐标轴Ox.在外力作用下,质点小球沿图中Ox轴方向偏离平衡位置,静止于x处,某一时刻,突然撤去外力,系统将在光滑平面上沿x方向作微小振动[6].
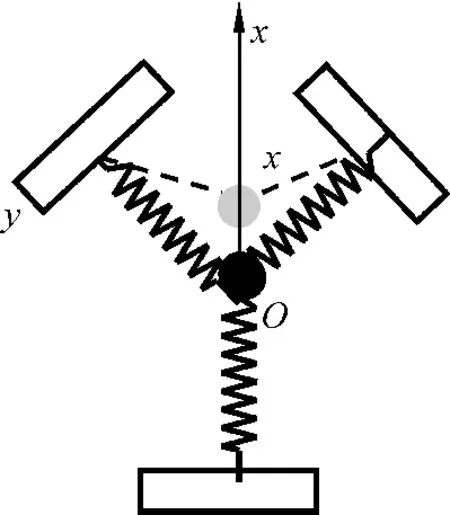
图3 二维对称3弹簧振子
系统的总势能为

进行泰勒级数展开得

例4若在例3的基础上再加一个弹簧,4根劲度系数为k,原长为l的弹簧互成90°就得到如图4(a)所示的系统.平衡时各弹簧均恰好为原长,以平衡位置为坐标原点O,建立如图所示的坐标轴Ox.若在外力作用下将质点小球沿图4(a)的x方向移动微小距离,撤去外力,系统将在光滑平面上沿x方向作微小振动[6].
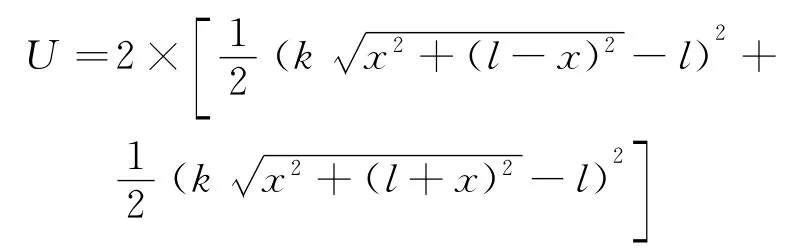
系统的总势能为

进行泰勒级数展开得
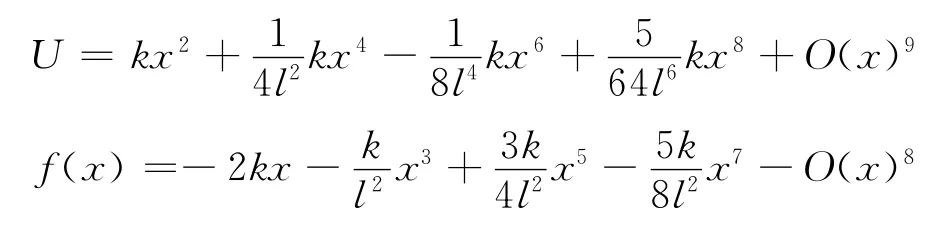
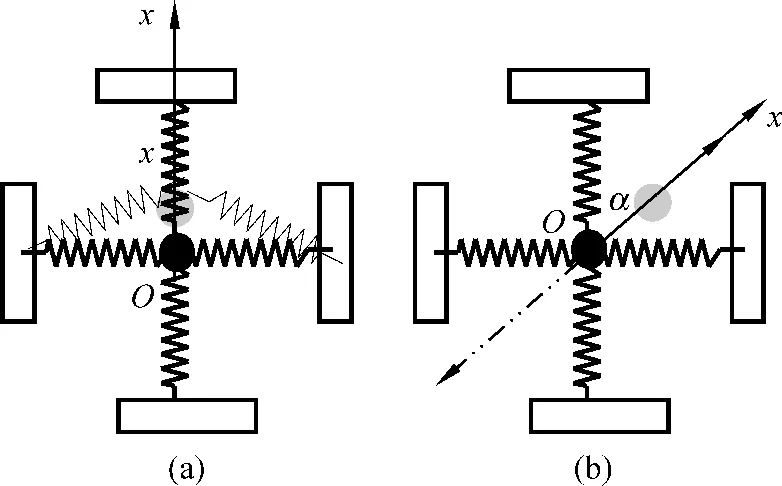
图4 弹簧振子系统
同样,若在外力作用下将质点小球沿图4(b)中所示的x方向移动微小距离,其中角α=45°,可以得到系统的总势能为
变形后进行泰勒级数展开得
如果保留低阶无穷小,忽略高阶无穷小时,此系统的微小振动也是简谐振动.
3 结语
部分学生在学习弹簧参与的微小振动时,会产生这样的错误观念:①认为只要系统在平衡位置附近作往复的小振动就是简谐运动,但如例1所示,小球沿光滑的水平刚性细杆在平衡位置附近作往复振动,但系统不满足简谐运动的充要条件,其微小振动不是简谐运动;②认为多个弹簧参与的微小振动,如果其中每个弹簧产生的作用力为线性回复力,则系统在平衡位置附近的往复振动是简谐运动,但如例2所示,每个弹簧产生的作用力为线性回复力,但系统不满足简谐运动的充要条件,其微小振动不是简谐运动;③认为多个个弹簧参与的微小振动,不是简谐运动,但如例3和例4所示,分别有3个和4个弹簧参与的微小振动,但其系统满足简谐运动的充要条件,其微小振动是简谐运动.所以在判断弹簧参与的微小振动是否为简谐运动时,一定要根据简谐运动的充要条件进行详细分析.
[1]赵凯华,罗蔚茵.新概念物理教程力学[M].北京:高等教育出版社,2005.
[2]漆安慎,杜婵英.力学[M].北京:高等教育出版社,2003.
[3]梁绍荣,刘昌年,盛正华,等.普通物理学(第四分册)力学[M].北京:高等教育出版社,2005.
[4]李栋.物体在稳定平衡位置附近的微小振动不一定都是简谐振动[J].物理与工程,2006,16(1):59-61.
[5]林少光,龚善初.弹簧振子非线性振动的周期计算[J].湖南文理学院学报(自然科学版).2009,21(4):19-22.
[6]廖旭,任学藻.组合线性弹簧振子中的非线性振动[J].大学物理,2008,27(2):25-28.
猜你喜欢
中学生理科应试(2024年3期)2024-06-26 07:54:45
赤峰学院学报·自然科学版(2021年10期)2021-11-11 03:34:02
学校教育研究(2021年14期)2021-09-06 03:18:55
中学生数理化·自主招生(2021年8期)2021-05-30 10:48:04
中文信息(2019年2期)2019-03-18 11:50:18
数学物理学报(2018年1期)2018-03-26 08:16:58
中学物理·高中(2016年11期)2016-12-15 01:30:36
电测与仪表(2016年18期)2016-04-11 11:30:30
法医学杂志(2015年4期)2016-01-06 12:36:36
物理实验(2015年10期)2015-02-28 17:36:55
