
基于时空转换法的正弦波光栅尺位移测量系统设计*
2015-08-17 09:05范国鹏李振华周文庆
传感技术学报 2015年9期
范国鹏,周 莉*,殷 明,李振华,蒋 涛,周文庆
(1.安徽理工大学电气与信息工程学院,安徽淮南232001;2.中国矿业大学信息与电气工程学院,江苏徐州221116)
基于时空转换法的正弦波光栅尺位移测量系统设计*
范国鹏1,周莉1*,殷明2,李振华1,蒋涛1,周文庆1
(1.安徽理工大学电气与信息工程学院,安徽淮南232001;2.中国矿业大学信息与电气工程学院,江苏徐州221116)
光栅尺作为高精度位置测量仪器,其分辨率受制于超精密的空间刻划技术,测量精度急需通过电子学细分法来提高。为此,提出了“时空转换”的思想:借助于载波调制理论,引入了恒定的时空当量,将对空间位移的测量转换为对信号瞬时周期的测量。首先,进行了时空转换法的数学推导,探究了正弦波光栅尺位移的测定和移动方向的判别方法;然后,在DSP开发平台下,搭建出基于时空转换法的正弦波光栅尺位移测量系统;最后,从实验数据以及光栅信号的残余直流电平、幅值不均衡、相位不正交等方面进行了误差分析。实验表明:栅距为8μm的正弦波光栅尺,在时空转换法下,平均测量误差为±0.258 1 μm,兼顾了细分与辨向。
时空转换法;载波调制;光栅信号;误差分析
EEACC:1280;7220doi:10.3969/j.issn.1004-1699.2015.09.017
光栅尺是一种以高精度计量光栅作为检测元件,利用光栅衍射或透射原理以及光电转换技术,将位移信息转换成相应的模拟信号或数字脉冲的检测装置[1]。然而,制约现有光栅尺发展的关键因素在于:其依赖的是基于超精密的空间刻划技术[2]。增加光栅尺栅线数的方法,造成栅距减小,因而,对光学系统和机械系统的要求变得严格;与此同时,也导致光栅的最大运动速度受到了限制[3]。因此仅仅依靠进一步增加光栅线的密度已经远远不够,迫切需要寻求新的方法来提高光栅尺的测量精度。
时空转换细分方法作为一种电子学细分方法,在光栅尺位移测量系统中得到广泛应用。然而,基于模拟技术实现的TDC电路,工作不稳定、易受外界噪声、温度和电压的干扰[4];基于FPGA的时间数字转换技术,则需对时间间隔进行粗测和细测,虽然时间间隔分辨率能达到65 ps,且基于此项技术的光栅尺位移测量系统,其精度也能达到0.32 μm,但是受非线性修正、偏移误差、LSB相对标准不确定等影响[5],另外,该方案仅能够满足低速条件下的测量要求[6]。因此设计合适的测量系统,在光栅尺较高运动速度下,提高测量精度的同时兼顾细分和辨向是关键。
本文将“时空转换”的思想运用于提高光栅尺测量精度上,借助于载波调制理论,通过DSP的PWM模块,产生两路同频且相位相差90°的高频斩波,对光栅尺差分放大后的正弦信号进行调制,经带通滤波器和过零比较器处理后,获得含有位移信息的脉冲信号。至此,空间位移的测量转换为对脉冲信号瞬时周期的测量。通过DSP的CAP模块,实现了对时间间隔的精密测量。另外,在软件方面,系统增设了补偿细分查表法,对当前误差周期内的光栅尺位移进行了补偿,从而完成对正弦波光栅尺其位移和移动方向的测定。
1 时空转换法的数学推导[7]
设W表示正弦波光栅尺的栅距,Δx表示光栅相对位移,则空间位移角θ()x表示为:

设ν(t)表示正弦波光栅尺的瞬时移动速度,则相对位移可以表示为:

于是,空间位移角θ(x)可表示为:

1.1正弦波光栅尺位移的测定
正弦波光栅尺原始4路输出信号为:
Us1=U0+Usinθ(x)(4)
Us2=U0-Usinθ(x)(5)
Uc1=U0+Ucosθ(x)(6)
Uc2=U0-Ucosθ(x)(7)
经差分放大后正弦波光栅尺输出信号为:
Us(x)=2Usinθ(x)(8)
Uc(x)=2Ucosθ(x)(9)
周期为T0,相位相差的两路斩波信号,其傅里叶级数可表示为:

于是,调制后信号为:

经带通滤波器[8]处理后得:

由此可见,经相位调制处理,已将含有位移信息的空间信号θ(x)“加载”至时间信号Up上。
Up的瞬时相位为:

则有,

于是,正弦波光栅尺瞬时移动速度为:

位移差为:

正弦波光栅尺位移为:
为便于对信号Up周期的测量,可将其由过零比较器处理后变为同频的方波。
由式(16)可知:正弦波光栅尺瞬时移动速度的测量,需要获取瞬时周期Tp;然而由式(18)可知:其位移的测量,无需单独测量各个瞬时周期T1、T2…Tn,只需一次性测量从T1到Tn的总时间,以及该段时间内的脉冲个数n,因而,从测量原理上消除了产生累积误差的可能性。
1.2正弦波光栅尺移动方向的判断
由时空转换法的数学推导可知,光栅尺的位移差为:

因此,当Tp<T0时,Δx>0,正弦波光栅尺右移;当Tp>T0时,Δx<0,正弦波光栅尺左移;当Tp=T0时,Δx=0,正弦波光栅尺静止。
2 时空转换法的信号处理
2.1正弦波光栅尺输出信号处理流程
正弦波光栅尺原始输出的四路信号,经差分放大后变为两路正弦波,与两路高频斩波对应相乘后,再经加法器叠加,得到调制信号S,通过带通滤波器的处理后,获得信号Up,由过零比较器处理,输出同频率的方波,通过DSP的捕捉单元,对该方波进行捕捉可获得其周期,根据上述数学推导公式即可求出正弦波光栅尺的瞬时速度、位移以及移动方向。具体处理流程如图1所示。

图1 正弦波光栅尺信号处理流程图
2.2正弦波光栅尺输出信号处理波形图
正弦波光栅尺输出的信号在各阶段的波形图如图2所示。
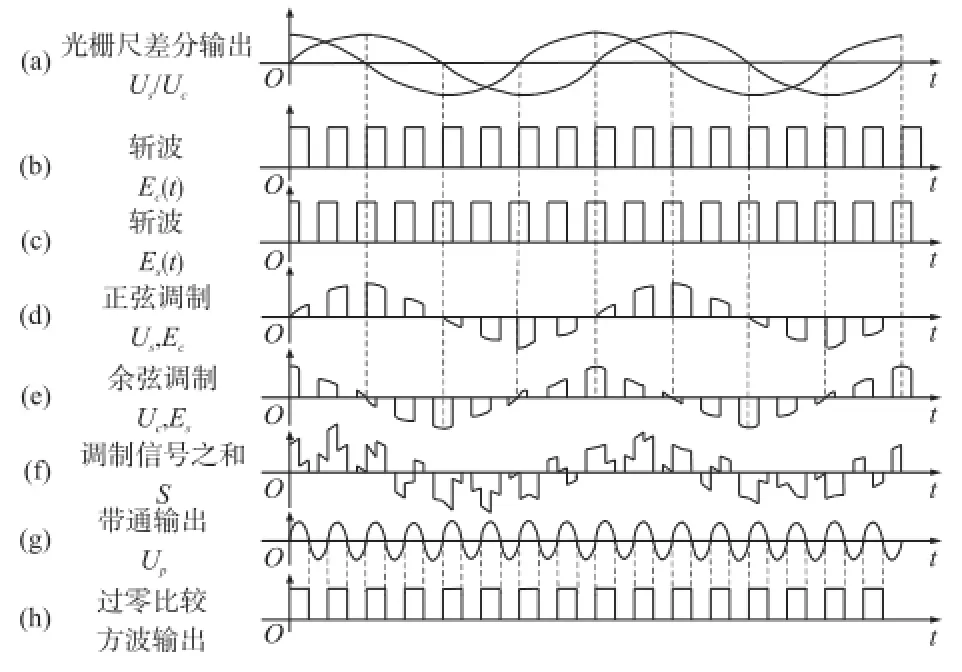
图2 正弦波光栅尺输出信号处理波形图
图2(a)是正弦波光栅尺差分放大后的波形;图2(b)是余弦斩波的傅里叶级数波形:图2(c)是正弦斩波的傅里叶级数波形;图2(d)是正弦调制后的波形;图2(e)是余弦调制后的波形;图2(f)正弦调制与余弦调制叠加后所得的波形;图2(g)是叠加信号经带通滤波器滤波后的波形;图2(h)是带通滤波后的信号经过零比较器处理后的方波波形。
3 时空转换法的实验设计
3.1实验平台
选用的高速微处理器DSP型号为: TMS320F28335。处理器运行主频为150 MHz,能高速处理外来信息及运算,为系统可靠运行提供保证。其中,PWM模块用来产生斩波信号Es(t)和Ec(t);内置正交解码(捕获)单元,实现对四倍频法输出脉冲的捕获,以及对时空转换法输出脉冲周期Tc的测算;RS232接口用来与PC机进行数据传输。
基准光栅尺型号为:德国海德汉光栅尺LIP372。栅距:0.512 μm,输出信号:TTL,最高速度:0.38 m/min,最大行程:270 mm。
待测光栅尺型号为:德国海德汉光栅尺LIF481。栅距:8 μm,输出信号:正弦波1 Vpp,最高速度:72 m/min,最大行程:320 mm。
将待测的正弦波光栅尺与基准光栅尺放置在同一条直线导轨上,随着机床的移动而一起移动。对待测正弦波光栅尺输出的信号,分别进行时空转换法和四倍频法处理,并通过上位机分别显示移动位移,从而与基准光栅尺测得的位移进行对比。系统硬件结构如图3所示。
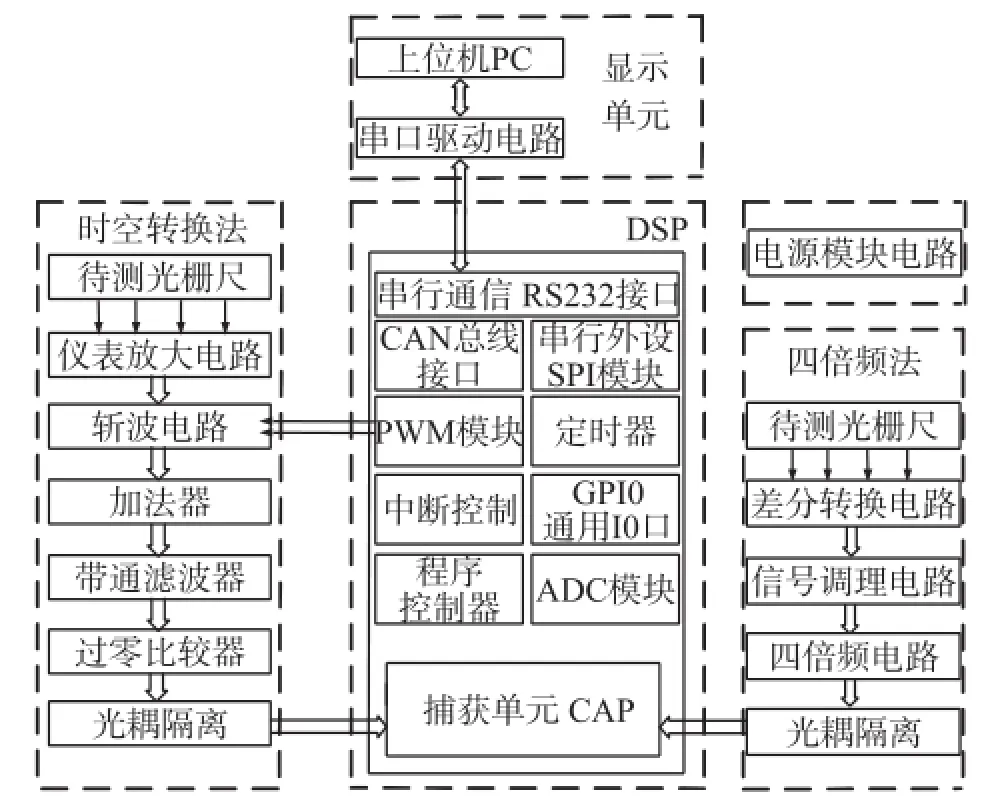
图3 系统硬件结构图
3.2实验过程
(1)斩波信号Es(t)和Ec(t)的PWM模块产生:
根据正弦波光栅尺的移动速度,采用单神经元自适应PID的方法[9],通过DSP的PWM模块,产生同频且相位相差90°的方波信号。

图4 斩波信号图
(2)时空变换法输出脉冲信号周期的捕获:
将时空转换法处理后的脉冲接入DSP的捕获单元引脚CAP3,并选择定时器1作为时间基准,DSP捕获引脚上的电平变化并记录它发生的时刻,从而获得脉冲的周期Tc。
(3)四倍频法脉冲信号的解码:
四倍频电路[10]输出的两路正交脉冲(同频、相差1/4周期),经光耦隔离,接入到DSP的捕获单元CAP1和CAP2,并选择定时器2作为时间基准,对两路正交输入脉冲的上升沿进行计数。通过上升沿的先后判断光栅尺的移动方向,通过脉冲周期计算其位移和速度。
(4)上位机界面设计:
设计了基于Visual C++的上位机界面。DSP通过串行通讯接口RS232,经串口驱动电路,将时空转换法和四倍频法各测得的光栅尺移动位移、速度和移动方向送至上位机显示。
3.3实验结果
(1)时空转换法与四倍频法测得的位移数据如表1所示。
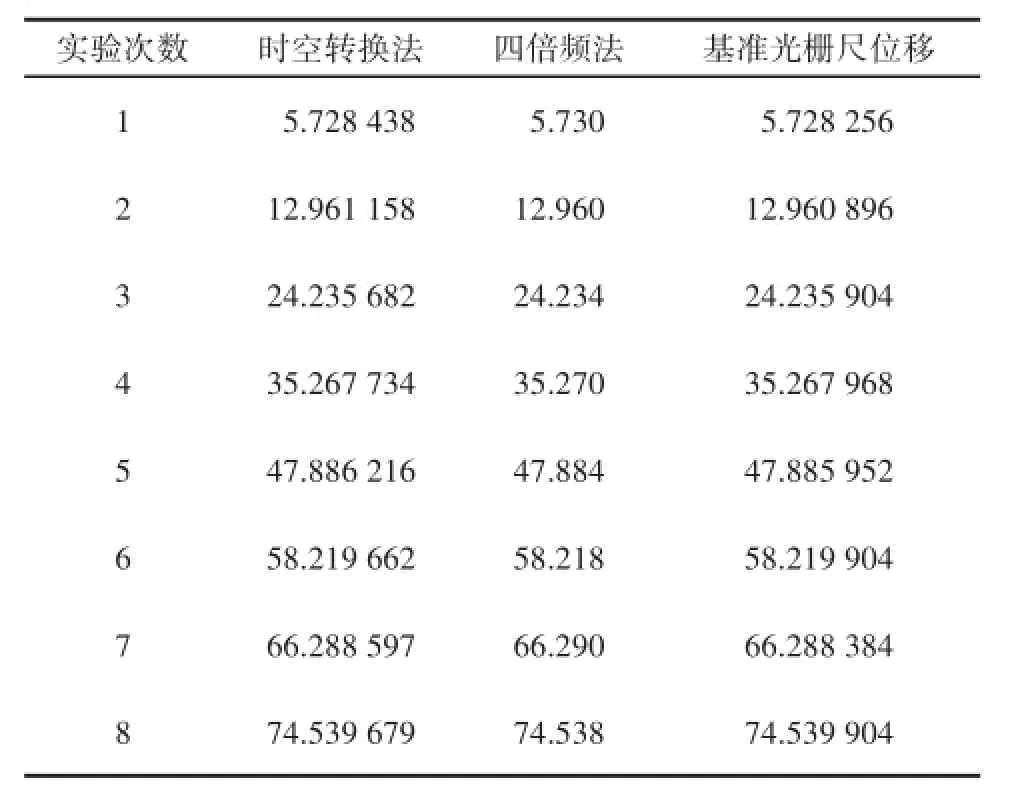
表1 时空转换法与四倍频法测得位移数据 单位:mm
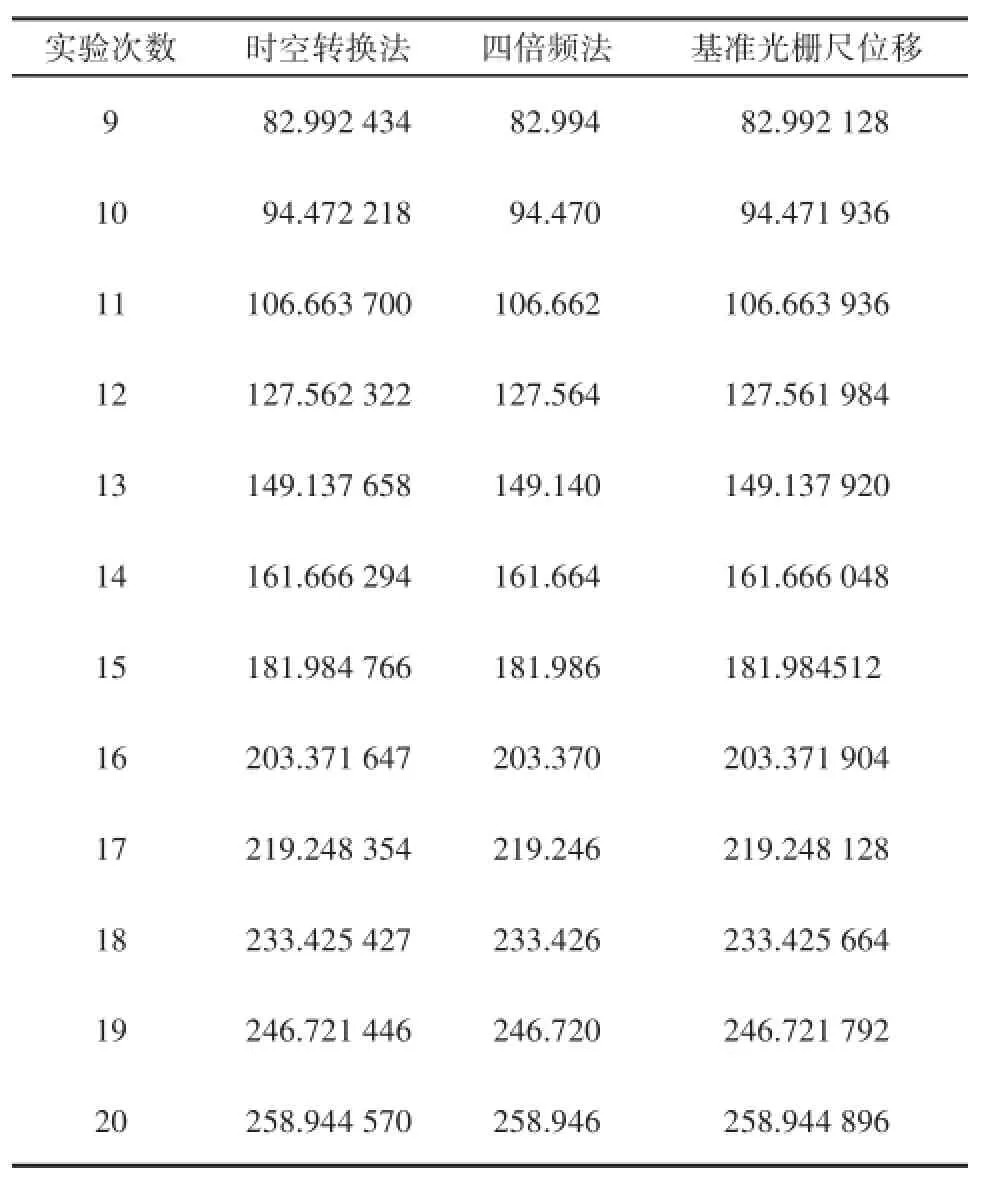
续表1
(2)由时空转换法与四倍频法测得的位移误差数据在MATLAB下绘制的波形图如图5所示。
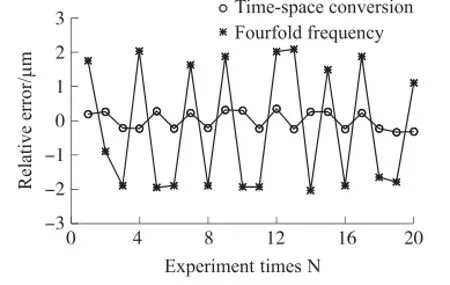
图5 时空转换法与四倍频法测得的位移误差波形图
4 时空转换法的误差分析
4.1从实验数据分析
经多次试验可知:基于时空转换法的正弦波光栅尺,其运动速度不宜超过18 m/min。另外,时空转换法的位移分辨率约为:0.042 μm,平均位移误差为:0.258 1 μm,标准差为:0.268 1 μm;四倍频法的位移分辨率为:2 μm,平均位移误差为:1.783 0 μm,标准差为:1.8 438 μm。
由此可知:时空转换法的分辨率是四倍频法的47.6倍,测量精度是四倍频法的约6.9倍,且时空转换法的位移误差数据分布得更为紧密。
另外,时空转换法较幅值分割法在细分倍数上优势明显;而与锁相倍频法相比,时空转换法在保持细分倍数高的同时,还兼顾了辨向。
4.2从光栅尺信号质量分析
(1)直流电平残差
正弦波光栅尺输出四路正弦电信号,经过差分放大电路处理后,仍存有剩余直流量[11]。另外,模拟差分放大电路本身的温漂也会造成直流电平分量。
可设差分放大后的两路输出信号为:

则,经斩波电路和带通滤波器处理后,输出信号为:

由此可见:残余直流电平造成实际输出信号的相位不再随位移呈线性变化。根据需要可采用乘法倍频法[12],将直流电平残差调整到系统可接受的范围之内。
(2)幅值不均衡
运动导轨的直线度、运放增益的不稳定、以及光电转换元件的光电转换比率不稳定等因素,导致了正弦波光栅尺输出信号幅值的不均衡。
可设差分放大后的两路输出信号为:

则,经斩波电路和带通滤波器处理后,输出信号为:

由此可见:幅值不均衡也造成了实际输出信号的相位不再随位移呈线性变化。可设计幅值调整电路[13]对正弦波光栅尺输出信号进行处理。
(3)相位不正交
由于正弦波光栅尺刻线误差和安装误差的存在,因此差分放大后输出的信号,其相位差可能并非一直为。
可设差分放大后的两路输出信号为:

则,经斩波电路和带通滤波器处理后,输出信号为:

由此可见:相位不正交依然造成了实际输出信号的相位不再随位移呈线性变化。
相位不正交较直流电平残差和幅值不均衡而言,其对系统影响更为突出。对此,可利用希尔伯特变换原理,构造同频光电信号正交性偏差的动态测量算法。即,利用当前周期正交性偏差的测量结果,实现对相邻周期莫尔条纹光电信号正交性的补偿[14]。在软件方面,系统增设了补偿细分查表法,对当前误差周期内的光栅尺位移进行了补偿。
5 结论
本文讨论了位移测量中的时空观,将“用时间测量空间”的思想运用于莫尔条纹的细分。提出了“时空转换”的思想:借助于载波调制理论,将对空间位移的测量转换为对信号瞬时周期的测量。实验表明:基于时空转换法的正弦波光栅尺位移测量系统,测量位移精度高,兼顾了细分与辨向,可广泛用于测量仪、数控机床等高精度位置测量领域。
[1] 王国超,颜树华,高雷,等.光栅干涉位移测量技术发展综述[J].激光技术,2010,34(5):661-664.
[2] 陶仁浩.基于增量式光电编码器的高精度位置检测技术研究[D].南京:南京航空航天大学,2012.
[3] 郑忠杰,陈德传.正弦波光栅尺信号的方波相移式细分法及应用[J].传感技术学报,2014,27(10):1437-1442.
[4] 李大鹏,徐东明,陈文宣.基于门延时的数字TDC电路设计[J].中国集成电路,2011,20(7):37-40.
[5] 杨俊.基于TDC与FPGA精密时间测量技术的研究与应用[D].武汉:中国科学院武汉物理与数学研究所,2012.
[6] 冉扬洁,江中伟,杨继森,等.基于TDC-GP2的高速时栅位移传感器信号处理系统的研究[J].传感技术学报,2014,27 (12):1654-1658.
[7] 郭雨梅,崔晋玲,刘雪艳,等.锁相式莫尔条纹信号细分方法[J].哈尔滨工业大学报,2007,39(9):1496-1498.
[8] 邵毅全,何强,赵杨,等.基于二阶滤波器的高阶带通滤波器设计和仿真[J].激光杂志,2013,34(1):25-27.
[9] 陈本永,吴晓维,张建新.精密直线位移工作台单神经元自适应PID控制方法研究[J].传感技术学报,2004,12(4):583-586.
[10]Yao Fengjia.Design of Vehicle Speed Controller Based on Incremental Photoelectric Encoder[J].Internet of things Technologies,2013(4):16-19.
[11]张志刚.光电编码器细分误差分析及补偿研究[D].哈尔滨:哈尔滨工业大学,2010.
[12]郭雨梅,崔晋玲.乘法倍频对锁相式莫尔条纹信号细分方法的改进[J].上海交通大学学报,2009(5):837-840.
[13]苏东风.高精度标定转台光栅测角系统关键技术研究[D].长春:中国科学院长春光学精密机械与物理研究所,2011.
[14]高旭,万秋华,赵长海,等.莫尔条纹光电信号正交性偏差的实时补偿[J].光学精密工程,2014,22(1):213-219.

范国鹏(1988-),男,安徽安庆人,硕士研究生,研究方向为光电传感与光电集成系统,phdfanry@sina.com;

周莉(1964-),女,安徽淮南人,博士,副教授,硕士生导师,研究方向为智能控制、运动控制、智能检测与信息处理等,lizhou@aust.edu.cn。
Design of the Displacement Measurement System for Sine-Wave Grating Based on Time-Space Conversion Method*
FAN Guopeng1,ZHOU Li1*,YIN Ming2,LI Zhenhua1,JIANG Tao1,ZHOU Wenqing1
(1.College of Electrical and Information Engineering,Anhui University of Science and Technology,Huainan Anhui 232001,China;2.School of Information and Electrical Engineering,China University of Mining and Technology,Xuzhou Jiangsu 221116,China)
A grating has been viewed as the high-precision position measuring instrument,however,its resolution is limited by the spatial characterization based on ultraprecise technology.Therefore,the measuring accuracy need to be improved by the electronics subdivision urgently.Time-space conversion method has been proposed in this paper. Based on carrier modulation theory and the spatial equivalent constant,measuring displacement is converted to the measurement of instantaneous signal cycle.Firstly,the mathematical derivation for time-space conversion method is conducted.Furthermore,the identification method for sine-wave grating displacement and its moving direction is explored.Then,displacement measurement system for sine-wave grating based on time-space conversion method is established under DSP platform.Finally,the error has been analyzed based on experimental data and raster signals,such as residual DC level,amplitude imbalance and non-orthogonal phase.As for the sine-wave grating with a grating pitch of 8 μm,experimental results show that the average measuring error of the time-space conversion method is±0.258 1 μm,meanwhile,the subdivision and the direction discrimination are contained.
time-space conversion method;carrier modulation;grating signal;error analysis
TP212;TP271.4
A
1004-1699(2015)09-1367-06
项目来源:淮南市科技计划项目(2014A1801)
2015-04-16修改日期:2015-06-18
猜你喜欢
工程与试验(2022年2期)2022-08-08
中学生数理化·八年级物理人教版(2022年6期)2022-06-05
中学生数理化·八年级物理人教版(2021年6期)2021-11-22
四川工商学院学术新视野(2021年2期)2021-11-02
商品与质量(2020年53期)2020-11-27
电子制作(2019年7期)2019-04-25
精密制造与自动化(2018年1期)2018-04-12
中国新通信(2016年22期)2017-01-13
中学课程辅导·教师通讯(2015年14期)2015-09-29
制造技术与机床(2011年8期)2011-09-26
