
Finite-time Attitude Control:A Finite-time Passivity Approach
2015-08-11 11:56ShuochenLiuZhiyongGengandJunyongSun
Shuochen Liu,Zhiyong Geng,and Junyong Sun
Finite-time Attitude Control:A Finite-time Passivity Approach
Shuochen Liu,Zhiyong Geng,and Junyong Sun
—This paper studies the finite-time attitude control problem for a rigid body.It is known that linear asymptotically stabilizing control laws can be derived from passivity properties for the system which describes the kinematic and dynamic motion ofthe attitude.Our approach expands this framework by defining finite-time passivity and exploring the corresponding properties. For a rigid body,the desired attitude can be tracked in finite time using the designed finite-time attitude control law.Some finitetime passivity properties for the feedback connection systems are also shown.Numerical simulations are provided to demonstrate the effectiveness of the proposed control law.
Index Terms—Attitude control,finite-time passivity,finite-time control,modified Rodrigues parameters.
I.INTRODUCTION
T HE attitude control of a rigid body has been extensively studied in the past years.It is a very interesting problem due to its importance in nonlinear controltheory and different applications in engineering,such as slewing and pointing of spacecrafts,helicopters,satellites,underwater vehicles and robot manipulation.
The attitude stabilization problem of a rigid body has been investigated by many researchers,and differentnonlinear control methods have been proposed,such as adaptive control[1], hybrid control[2],PD+control[3].Among the existing results, most are asymptotically stable ones[1−7],which imply thatthe state trajectories of the system converge to its equilibrium as time goes to infinity.
However,there is little literature about finite-time attitude control of a rigid body.Obviously,finite-time stabilization of a system makes it possible to achieve higher-precision performance and better disturbance rejection properties[8−10].For example,the terminal sliding mode control method employed in[9]guaranteed finite-time reachability of given desired attitude of a rigid spacecraft,but the proposed control law had a singularity problem.In[10],by the method of adding a power integrator,a finite-time attitude tracking control law using both attitude and angular velocity was designed.A distributed finite-time containment control scheme was reported in[11].
The existing finite-time attitude control laws mainly depend on the methods explored in the study for generalnonlinear systems.Usually these control laws are obtained by complicated calculation and are noteasy to understand.In this case,using the inherent properties of system to simplify the designing process might be possible and desirable.
The attitude control with the feedback of full state measurements(i.e.,attitude and angular velocity)has been changed to the control without the requirement of the angular velocity measurement due to the lack of tachometer of manipulators[6−7,12−16].This design process is based on the passivity property established for attitude motion of a rigid body.Egeland and Godhavn[7]derived the adaptive attitude controllaw for robotic manipulators based on the idea of passivity.Tsiotras[15]showed thatlinearasymptotically stabilizing control laws withoutangular velocity measurements could be obtained naturally and easily from the passivity properties.The stabilization controlmethod proposed in[16]used an auxiliary dynamical system to replace the angular velocity feedback. For multiple rigid bodies'case,Ren[17]used a similar idea to derive distributed passivity-based control laws.
Differentfrom the existing finite-time attitude controlmethods,our approach focuses on designing a finite-time attitude control law based on the passivity properties of the attitude motion of a rigid body.We define the finite-time passivity for generalnonlinear systems and derive stability criterion for finite-time strictly passive systems.Also,we obtain different nonlinear finite-time control laws for different classes of passive systems.Based on the above results,by combining with sliding mode controlapproach and the properties of finitetime passivity,a finite-time attitude controller is proposed.To the best of authors'knowledge,this is a new solution to the finite-time attitude control problem.The proposed approach naturally expands the properties for passive systems and may provide a tool for the study of general nonlinear systems.
The paper is organized as follows.In Section II,some preliminaries and problem formulation are given.In Section III,the finite-time passivity for dynamicalsystems is defined, and for the attitude set point control problem,a finite-time attitude control law is derived.Some finite-time passivity properties of the feedback connection system are shown in Section IV.In Section V,numerical simulations are given to illustrate the results.Finally,we make conclusion in Section VI.
II.PRELIMINARIES AND PROBLEM FORMULATION
A.Rotation Motion of a Rigid Body
It is fundamental and important to select a nonsingular parameterization for attitude.Modified Rodrigues parameters (MRPs)are a popular parameterization of three-dimensional coordinate expression[18].We adoptthe MRPs to describe the rotation motion of a rigid body.
Letσ=ηtan(θ/4)∈R3(−2π<θ<2π)stand for the MRPs for a rigid body,whereηis the Euler axis andθis the Euler angle.For a three-dimensional vectorν=[ν1,ν2,ν3]T, symbol s(ν)=[0,ν3,−ν2;−ν3,0,ν1;ν2,−ν1,0].The cross product of two vectors can be denoted by the multiplicationof a skew-symmetric matrix and a vector,that is to say, s(a)b=−a×b,a,b∈R3.Let u(t)∈R3be an external control torque vector acting on the rigid body.The mass moment of inertia is denoted by the positive and symmetric matrix J∈ R3×3which can be usually transformed to a diagonal matrix.ω(t)∈R3is the angular velocity of rigid body with respect to the inertial frame expressed in the body frame.I3denotes the 3×3 identity matrix.The attitude kinematics and dynamics of a rigid body are

B.Passivity
Definition 1[19].Consider a dynamical system represented by

where f :Rn×Rn→ Rnis locally Lipschitz,h : Rn×Rn→Rnis continuous,f(0,0)=0,and h(0,0)=0.
The system is said to be passive if there exists a continuously differentiable positive semi definite function V(x) (called the storage function)such that

Moreover,it is said to be
1)lossless if uTy= ˙V;
2)output feedback passive if uTy≥ ˙V+yTρ(y)for some functionρ;
3)output strictly passive if uTy ≥ ˙V+yTρ(y)and yTρ(y)>0,∀y/=0;
4)strictly passive if uTy≥ ˙V+Ψ(x)for some positive definite functionΨ.
In all cases,the inequalities should hold for all(x,u).
The definition of zero-state observability is quite useful in stating the following stability criterion for strictly passive system.
Definition 2[19].The system(4a)and(4b)is said to be zero-state observable,if no solution of˙x=f(x,0)can stay identically in S={x∈Rn|h(x,0)=0},other than the trivial solution x(t)≡0.
Lemma 1[19].Consider system(4a)and(4b),the origin of ˙x=f(x,0)is asymptotically stable if one of the following statements is satisfied:
1)The system is strictly passive;
2)The system is output strictly passive and zero-state observable.
Furthermore,if the storage function is radially unbounded, the origin will be globally asymptotically stable.
Ifwe require the storage function to be positive definite,one can obtain the following controllaw to globally asymptotically stabilize the origin of a nonlinear dynamical system.
Lemma 2[19].If system(4a)and(4b)is
1)passive with a radially unbounded positive definite storage function;
2)zero-state observable.
Then the origin x=0 can be globally stabilized by the control u=−ϕ(y),whereϕis any locally Lipschitz function such thatϕ(0)=0 and yTϕ(y)>0 for all y/=0.
In essence,the design procedure of a finite-time control law for a dynamical system is a process to make sure the trajectories of the states of closed-loop system reach desired points in finite time.The corresponding properties are described by finite-time stability.
C.Finite-time Stability
Lemma 3[20].Consider the system ˙x=f(x),where the continuous function f(·):Rn→ Rnsatisfies f(0)= 0,x∈Rn.Suppose there exists a continuous,positive definite storage function V(x):D→R,realnumbersα∈(0,1)and c>0,such that˙V(x)+c(V(x))α≤0 on D,where D is an open neighborhood of the origin,then the origin of system ˙x=f(x)is finite-time stable.Moreover,if T is the settling time,then T ≤ (V(x))1−α/(c(1−α)).The origin is said to be globally finite-times stable if it is finite-time stable and D=Rn.
Remark 1.The statement that the origin of system ˙x= f(x)is finite-time stable means that the state variables reach the origin in finite time.
Lemma 4[21].For any xi∈R(i={1,···,n}),the following inequality is satisfied:

for any real number p∈(0,1].
D.Problem Formulation
Given the system described by(1a)and(1b),the control aim is to design a finite-time control law which guarantees the attitude of a rigid body tracks the desired steady attitude target in finite time.
III.FINITE-TIME PASSIVITY AND ATTITUDE SET POINT CONTROL
A.Finite-time Passivity
Lyapunov stability is related nicely to passivity with the positive storage(energy)function.Since the requirements of the storage function in the definition of finite-time stability is stricter than Lyapunov function,it is naturalfor us to explore unique finite-time properties for a passive system.
Definition 3(Finite-time passivity).Consider the system described by(4a)and(4b),

The system is said to be finite-time strictly passive if there exists a continuously differentiable positive semidefinite function V(x)(called the storage function)such that

for someα∈(0,1)and c>0.
The finite-time stability of the origin of a system is determined by the finite-time passivity of the system.The results are as follows.
Theorem 1.Consider the system(4a)and(4b),if the system is finite-time strictly passive,then the origin of˙x=f(x,0) is finite-time stable.Furthermore,if storage function V(x) is radially unbounded,the origin will be globally finite-time stable.
The proof of Theorem 1 is in Appendix.
Remark 2.Theorem 1 can be viewed as a stability criterion fora finite-time strictly passive system.Ifa passive system(4a) and(4b)is lossless,the origin of the closed-loop system will be finite-time stable once the controllaw is designed properly to make the closed-loop system finite-time strictly passive.
Example.Consider the integrator system

where x∈Rn,u∈Rn.Suppose the output system is

where y∈Rn.Choose the storage function as

Taking the time derivative of the storage function along the trajectories of(5)yields

So the system is lossless.
Suppose the feedback to be designed is h0(x)∈Rn,then the closed-loop system is

where r∈Rnis the input.Then we get

So we have

for some real numbersα0∈(0,1)and c0>0.
Suppose

Then

The closed-loop system is finite-time strictly passive for input r and output y according to Definition 3.From Theorem 1,the origin of the autonomous closed-loop system is finitetime stable.
The corresponding control law is

Based on the above results,itis possible to derive finite-time control laws for certain passive systems.
Theorem 2.Consider the system described by

where f:Rn×Rn→Rnis locally Lipschitz,f(0,0)=0, for some real numbersα∈(0,1)and c>0.
1)If the system is lossless with storage function V = 2 ln(1+xTx),choosing V as the candidate Lyapunov function, the origin of the system is finite-time stable with control law u=−c·2α·x2α−1.
2)If the system is lossless with storage function V =where the diagonalmatrix J=diag{J1,J2,···,Jn} is positive definite,choosing V as the candidate Lyapunov function,then the origin of the system is finite-time stable with control law u=−c·
Proof.
1)Since the system is lossless,we will design a state feedback to make the closed-loop system finite-time strictly passive.Suppose r is the input and h(x) = [h1(x),h2(x),···,hn(x)]T∈Rnis the state feedback to be designed.
The closed-loop system is

Choosing V as the Lyapunov candidate function,then the closed-loop system is finite-time strictly passive.Based on Theorem 1,when input r=0,the origin is finite-time stable. So the corresponding control law is

2)The proof for case 2)is similar to case 1),thus omitted.□
Remark 3.According to Lemma 4,the index 2α−1 should belong to interval(0,1].In addition,the definition of finitetime stability(Lemma 3)requiresα∈(0,1).Combining two inequalities,we have thatαshould belong to interval(1/2,1).
It is very important to notice that the kinematics equation (1a)and dynamics equation(1b)describe two passive systems, respectively.
Proposition 1[15].
1)System(1a)is lossless with inputωand outputσ.
2)System(1b)is lossless with input u and outputω.
Proof.
1)Taking the time derivative of function V1(σ)=2ln(1+ σTσ)along the trajectories of(1a)yields that˙V1(σ)=σTω. This shows the system is passive(lossless).
2)Taking the time derivative of function V2(ω)=12ωTJω along the trajectories of(1b)yields that˙V2(ω)=ωTu.This shows the system is passive(lossless). □
From Theorem 2,we obtain the finite-time control laws for subsystems(1a)and(1b),respectively.
Proposition 2.If we can find real numbers satisfying α1∈(1/2,1)and c1> 0,then the origin of system(1a) is finite-time stable with control

If we can find real numbers satisfyingα2∈ (1/2,1)and c2> 0,then the origin of system(1b)is fi nite-time stable with control

B.Finite-time Set Point Control of A Rigid Body
Letωd,σdrepresent the desired angular velocity and attitude,respectively.Define e=[e1,e2,e3]T∈ R3as the relative attitude error between the actual attitude and the desired attitude,where

In order to describe the relative angular velocity error,the desired reference frame should be transformed to the body frame.Denote the transform matrix is Rbd,which is proper and orthogonal.Then Rbd=R(e)is given by

The relative angular velocity error is then represented by

The relative kinematic and dynamic equations are given as[10]

This paper studies the set point controlproblem for a rigid body.In this case,ωd=0,˙ωd=0.So the whole system is represented by

Therefore,we need to design control torque u which makes relative error e goes to zero in finite time.
The relative attitude kinematics and dynamics rotation equations(10a)and(10b)represent a system in cascade form. Controltorque u drives the dynamicalequation and angularvelocityωdrives the kinematic equation.For systems in cascade connection,itis easy to use a two-step methodology to achieve closed-loop stability.First,we choose a propersliding surface, concentrating on the stabilization of the kinematic equation treating the driving state(the angular velocity vector)as a control-like variable.Second,we proceed to the stabilization of the dynamical system to the desired state calculated in the first step treating control torque u as the driving state,driving the motion of the system to the proposed sliding surface in finite time.
Theorem 3.For system(10a)and(10b),if control torque u is chosen as

whereω∗=−kp·2p1·e2p1−1,kv>0,kp>0,1/2<p1,p2<1,symbol◦denotes the Hadamard product.Then e converges to zero in finite time.
Proof.
The proof consists of two steps.First,angular velocityω is treated as the input for(10a)and is developed to make e converge to zero in finite time.Select the sliding surface to be z= ω−ψ(e)such that when state trajectory of the system is restricted to the surface,the reduced-order model ˙e=G(e)ψ(e)has a finite-time stable origin.Next,control torque u is calculated in orderthatsliding surface z=ω−ψ(e) goes to zero in finite time and remains there forallfuture time.
Step 1.Angular velocityωdesign
The storage function is chosen as

along the trajectory of(10a),and using(3)we have

By Proposition 2,we get

so we obtain

By Lemma 3,e and V0(t)converge to zero in finite time.
Step 2.Control torque uuu design
The system describing attitude motion of a rigid body can be transformed into the form of

Design the sliding surface z=ω−ψ(e)and let J−1ν= J−1u− ˙ψ,we obtain

Takingν=−s(ω)Jω+ϕ(z),the task is simplified to design ϕ(z)to make z reach zero in finite time and remain there afterwards.
Choosing the candidate Lyapunov function as V1=12zTJ z, along(10b),we haveTaking

and by Lemma 4,we get

Thus z goes to zero in finite time and stays there afterwards.
Based on the above steps,we get the result proposed in Theorem 3. □
IV.FINITE-TIME PASSIVITY OF FEEDBACK SYSTEMS
In this section,some finite-time passivity properties for the feedback connection system determined by the finite-time passivity property of each component are shown.
Consider the feedback connection of two finite-time passive systems in Fig.1 represented by the state model


Fig.1. Feedback connection.
We require u1,y1,u2,y2to be vectors of the same dimension and the feedback connection to have a well-defined state model.The closed-loop state model takes the form of

where x=[x1,x2]T,u=[u1,u2]T,y=[y1,y2]Tand

We assume that f is locally Lipschitz,h is continuous,and f(0,0)=0,h(0,0)=0.Vi(i=1,2)are the storage functions of the two subsystem,respectively.V denotes the storage function of the feedback connection system as

It is known that the feedback connection of two passive systems in Fig.1 is passive[19].That is to say

For the fi nite-time passive systems,some new definitions and notions are given as follows.
Definition 4.The feedback connection of two finite-time strictly passive systems is
1)Lyapunov strictly passive if

for some ci>0 andαi∈(0,1),i∈{1,2};
2)finite-time strictly passive if

for some c>0 andα∈(0,1).
Now we are ready to present the finite-time stability of the feedback connection of finite-time strictly passive systems.
Theorem 4.The feedback connection of two finite-time strictly passive systems is Lyapunov strictly passive if input u=0.Furthermore,the closed-loop system is also a finitetime strictly passive system if the storage functions satisfy the following conditions:

Proof.Since every component is a finite-time strictly passive system,we get

From the feedback connection,we see that

as the storage function for the feedback connection,we obtain

So we know the closed-loop system is Lyapunov finite-time stable when

Now the closed-loop system is finite-time strictly stable. □
Remark 4.Theorem 4 shows thatfor the feedback connection oftwo finite-time strictly passive systems,the closed-loop system is also a finite-time strictly passive system for some region of the system energy.
V.NUMERICAL SIMULATIONS
We now illustrate the above results by means of some numerical simulations.We first show the effectiveness of the results of Proposition 2.
Consider system(1a),we suppose the initial MRP vector is σ0=[0.3,0.5,0.8]T.The values for the gains are chosen as c=1,4,6,10,andα=0.8.
The results are shown in Fig.2.Under control law(9a), the origin of system(1a)can be finite-time stabilized.The finite time T will decrease as we increase the value of parameter c which has the maximum value cmaxsatisfying ˙V(x)+cmax(V(x))α≤0.

Fig.2. Stabilization for system(1a).
For system(1b),we suppose the initial angular velocity is ω0=[0.3,0.5,0.8]Tand the inertia matrix is represented by J=diag{1,0.63,0.85}.The values of the gains are chosen as c=1,4,6,10,andα=0.8.Fig.3 shows thatundercontrol law(9b),the origin ofsystem(1b)can be finite-time stabilized. The finite time T will decrease as we increase the value of parameter c which has the maximum value cmaxsatisfying ˙V(x)+cmax(V(x))α≤0.
An example considered in[5]is addressed here to demonstrate the results proposed in Section III.Suppose a rigid body is with the inertia matrix(expressed in the body frame) J=diag{1,0.63,0.85},the initial orientation correspondsrepresentation,the desired attitude target corresponds to an eigenaxis/angle representation given by

The values of the gains are selected to be kp=6 and kv=6.In order to satisfy the finite-time stability theorem,we select p1=0.9 and p2=0.9.These values are chosen by trial and error to achieve good performance.Based on control law (11),we get the following results:Fig.4 depicts the behavior of the MRP vector,and Fig.5 shows the time history of the corresponding control effort.

Fig.3. Stabilization for system(1b).
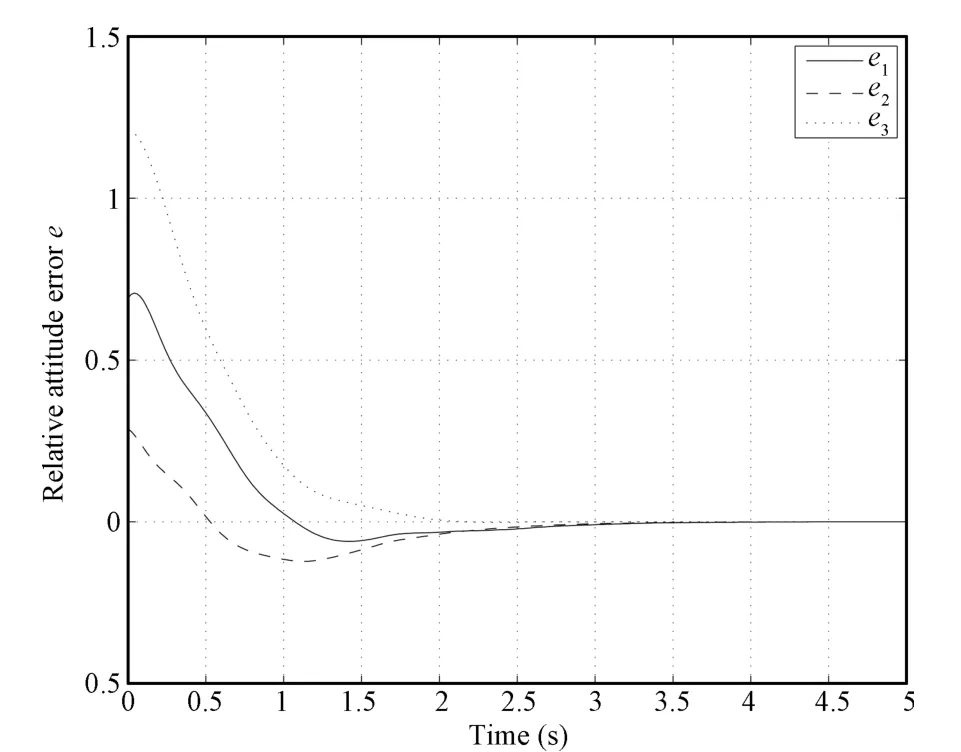
Fig.4. Stabilization for system(10a)and(10b).

Fig.5.Control input for system(10a)and(10b).
VI.CONCLUSION
In this paper,we propose a finite-time attitude control law for a rigid body based on the finite-time passivity.Some additionalfinite-time passivity results for feedback connection systems are also shown.Further meaningful problem worth of studying is the same attitude control problem without angularvelocity measurement and finite-time formation control for multi rigid spacecrafts.
APPENDIX
Proof of Theorem 1.Suppose the system is finite-time strictly passive and let V(x)be its storage function with

Now we willuse the inequality to show that V(x)is positive definite.Suppose the equation˙x=f(x,0)has a solution ϕ(t,x),starting from x at t=0 and defined on some interval [0,δ].Integrating(A1)yields

Suppose that there is¯x/=0 such that V(¯x)=0.Then(A2) goes to

which contradicts the claim that

This qualifies V(x)as a Lyapunov function candidate,and since

for some c>0 andα∈(0,1),we conclude thatthe origin is finite-time stable. □
REFERENCES
[1]Akella M R.Rigid body attitude tracking without angular velocity feedback.Systemand Control Letter,2001,42(4):321−326
[2]Luo W,Chu Y,Ling K V.Inverse optimal adaptive control for attitude tracking of spacecraft.IEEE Transactions on Automatic Control,2005, 50(11):1639−1654
[3]Mayhew C G,Sanfelice R G,TeelA R.Quaternion-based hybrid control for robust global attitude tracking.IEEE Transactions on Automatic Control,2011,56(11):2555−2566
[4]Schlanbusch R,Loria A,Kristiansen R,Nicklasson P J.PD+based output feedback attitude control of rigid bodies.IEEE Transactions on Automatic Control,2012,57(8):2146−2152
[5]Crouch P E.Spacecraft attitude control and stabilization:applications of geometric controltheory to rigid body models.IEEE Transactionson Automatic Control,1984,29(4):321−331
[6]Wen J T,Kenneth K D.The attitude controlproblem.IEEETransactions on AutomaticControl,1991,36(10):1148−1162
[7]Egeland O,Godhavn J M.Passivity-based adaptive attitude control of a rigid spacecraft.IEEE TransactionsonAutomatic Control,1994,39(10): 842−846
[8]Yu S H,Yu X H,Shirinzadeh B,Meng Z H.Continuous finite-time controlforrobotic manipulators with terminalsliding mode.Automatica, 2005,41(11):1957−1964
[9]Jin E,Zhao S.Robustcontrollers design with finite time convergence for rigid spacecraftattitude tracking control.AerospaceScienceTechnology, 2008,12(4):324−330
[10]Du H,Li S,Qian C.Finite-time attitude tracking control of spacecraft with application to attitude synchronization.IEEE Transactions on AutomaticControl,2011,56(11):2711−2717
[11]Meng Z Y,Ren W,You Z.Distributed finite-time attitude containment controlfor multiple rigid bodies.Automatica,2010,46(12):2092−2099
[12]Scharf D P,Hadeagh F Y,Ploen S R.A survey of spacecraft formation flying guidance and control(Part II):Control.In:Proceedings of the 2004 American Control Conference.Boston,USA:IEEE,2004. 2976−2985
[13]Lizarralde F,Wen J T.Attitude controlwithoutangularvelocity measurement:a passivity approach.IEEE Transactions on Automatic Control, 1996,41(3):468−472
[14]Tsiotras P.Stabilization and optimality results for the attitude control problem.Journal of Guidance,Control,and Dynamics,1996,19(4): 772−779
[15]Tsiotras P.Further passivity results for the attitude control problem. IEEE Transactionson AutomaticControl,1998,43(11):1597−1600
[16]Tayebi A.Unit quaternion based output feedback for the attitude tracking problem.IEEE TransactionsonAutomaticControl,2008,53(6): 1516−1520
[17]Ren W.Distributed cooperative attitude synchronization and tracking for multiple rigid bodies.IEEE Transactions on Control Systems Technology,2010,18(2):383−392
[18]Shuster M D.Survey of attitude representations.The Journal of the Astronautical Science,1993,41(4):439−517
[19]Khalil H K.Nonlinear Systems(Third Edition).Jersey:Prentice Hall, 2002.
[20]Bhat S,Bernstein D.Finite-time stability of continuous autonomous systems.SIAM Journal on Control and Optimization,2000,38(3): 751−766
[21]Hardy G,Littlewood J,Polya G.Inequalities.Cambridge,UK:Cambridge University Press,1952.

Shuochen Liu Master student in the Department of Mechanics and Engineering Science,Peking University.His main research interest is nonlinear control of mechanical systems.

Zhiyong Geng Professor in the Department of Mechanics and Engineering Science,Peking University. His research interests include robust and nonlinear control,nonlinear control of mechanical systems. Corresponding author of the paper.

Junyong Sun Ph.D.candidate in the Department of Mechanics and Engineering Science,Peking University.His research interests include cooperative control,multi-agent systems and nonlinear control of mechanical systems.
t
October 17,2013;accepted March 24,2014.This work was supported by NationalNatural Science Foundation(NNSF)of China (61374033).Recommended by Associate Editor Changyin Sun
:Shuochen Liu,Zhiyong Geng,Junyong Sun.Finite-time attitude control:a finite-time passivity approach.IEEE/CAA Journal of Automatica Sinica,2015,2(1):102−108
Shuochen Liu,Zhiyong Geng,and Junyong Sun are with the State Key Laboratory of Turbulence and Complex System,Beijing 100871,China(email:shchliu@pku.edu.cn;zygeng@pku.edu.cn;sjymath@pku.edu.cn).
 IEEE/CAA Journal of Automatica Sinica2015年1期
IEEE/CAA Journal of Automatica Sinica2015年1期
- IEEE/CAA Journal of Automatica Sinica的其它文章
- Autonomous Landing of Small Unmanned Aerial Rotorcraft Based on Monocular Vision in GPS-denied Area
- Adaptive Backstepping Tracking Control of a 6-DOF Unmanned Helicopter
- A Predator-prey Particle Swarm Optimization Approach to Multiple UCAV Air Combat Modeled by Dynamic Game Theory
- Guest Editorial for Special Issue on Autonomous Control of Unmanned Aerial Vehicles
- Continuous Sliding Mode Controller with Disturbance Observer for Hypersonic Vehicles
- Decoupling Trajectory Tracking for Gliding Reentry Vehicles