
Adaptive Backstepping Tracking Control of a 6-DOF Unmanned Helicopter
2015-08-11 11:57BinXianJianchuanGuoandYaoZhang
Bin Xian,Jianchuan Guo,and Yao Zhang
Adaptive Backstepping Tracking Control of a 6-DOF Unmanned Helicopter
Bin Xian,Jianchuan Guo,and Yao Zhang
—This paper presents an adaptive backstepping control design for a class of unmanned helicopters with parametric uncertainties.The control objective is to let the helicopter track some pre-defined position and yaw trajectories.In order to facilitate the control design,we divide the helicopter's dynamic model into three subsystems.The proposed controller combines the backstepping method with online parameter update laws to achieve the control objective.The global asymptotical stability (GAS)of the closed-loop system is proved by a Lyapunov based stability analysis.Numerical simulations demonstrate that the controller can achieve good tracking performance in the presence of parametric uncertainties.
Index Terms—Unmanned helicopter,adaptive backstepping control,trajectory tracking,parametric uncertainty.
I.INTRODUCTION
C OMPARED with the fixed-wing unmanned aerial vehicles(UAVs),unmanned helicopters have the characters of hovering,autonomous take-off and landing vertically and multi-attitude flight.They have a wide application prospectin the field of military and civilian applications.The unmanned helicopter is a special controlled object,which is a dynamic system of 6-degree-of-freedom(DOF),underactuated,multiinput multi-output(MIMO),strong coupling and nonlinear. Consequently,the development of sophisticated and reliable unmanned helicopter flight control system has recently become an attractive research topic in academic communities worldwide[1].
Nowadays,unmanned helicopter control methods include linear controller,nonlinear controller and intelligent controller.Traditional approaches to flight control and most initial attempts to achieve autonomous helicopter flight have been developed based on linear design techniques such as proportional-integral-derivative(PID)[2],linear quadratic regulator(LQR)[3],H∞[4]and gain scheduling[5].Linear control method is effective when the dynamic system state of an unmanned helicopter is near the equilibrium point.However, when the helicopter is away from the equilibrium point or aerobatic maneuvers are performed,the performance of the control system will deteriorate greatly.Therefore,in recently years there have been a growing number of papers using nonlinear control methods to deal with unmanned helicopterflight control.It is shown in[6]that approximated unmanned helicopter system with dynamic decoupling is full state linearizable by choosing positions and heading asoutputs. Nonlinear backstepping trajectory tracking control design for small scale helicopters is presented in[7].A two-time scale controller is presented in[8]by using adaptive backstepping technique to achieve the hover flight control of an unmanned helicopter.Robusttrajectory tracking controldesign for unmanned helicopters is introduced in[9−10].A position tracking controlsystem for a UAV using robustintegralof the signum of error(RISE)and neural network(NN)feedforward terms is developed in[11].In addition to the above two methods,intelligent control has also been widely used in the autonomous control of unmanned helicopters.The control methods based on model-free fuzzy and neural networks are reported in[12−13]respectively for their successful applications to autonomous fl ight control.
This paperpresents an adaptive backstepping controldesign for unmanned helicopters with parametric uncertainties.The proposed controller employs online parameter update laws to estimate unknown parameters associated with the helicopter's dynamics of mass and moment coefficients.When parametric uncertainties exist in the dynamic model,the proposed controller will be a significant improvement to the traditional exact model knowledge(EMK)control method as employed in[6−7].We use a simplified unmanned helicopter's nonlinear dynamic model for the flight control development.The main objective is to let the unmanned helicopter track a predefined position and heading reference trajectory.In order to facilitate the control design,we divide the helicopter model into three subsystems,which are the altitude subsystem,the yaw subsystem and the horizontal subsystem.Since there is no strong coupling between the three subsystems,we can design the controllers separately.The proposed design approach is obviously different from the two-level hierarchical control scheme reported in[8,11].Itis reasonable in thatthis approach is mathematically consistent with the intuitive flight notion. The global asymptotical stability(GAS)of the closed-loop error system is proved by a Lyapunov based stability analysis. Numerical simulations demonstrate that the proposed controller can achieve good tracking performance in the presence of parametric uncertainties.
This paper is organized as follows.In the next section, the nonlinear dynamic model of the unmanned helicopter is introduced.Sections IIIand IV are the main body of this paper, which presentthe adaptive backstepping controldesign and the stability analysis method.Simulation results and conclusion are presented in Sections V and VI.
II.DYNAMIC MODEL OF THE HELICOPTER
In order to develop the helicopter's equations of motion, first of all we should define two reference frames.The first one is the inertia frame defined as FI={OI,→xI,→yI,→zI}.The second is the body fixed reference frame defined as FB= {OB,→xB,→yB,→zB},where the center OBislocated atthe center of gravity(CG)of the unmanned helicopter.The direction of the inertia frame and the body frame unitary vectors can be seen in Fig.1.For the purpose of control,we consider a complete helicoptermodelas a rigid body with a force and moment generation process.The dynamic equations of the helicopter's rigid body can be derived using Newton-Eulerequations in the configuration space S E(3)=R3×S O(3)[6,9,14].There are four control inputs associated with helicopter piloting,which are defined as u=£TMTTa b⁄T.The former two components TMand TTare the magnitudes of the thrusts generated by the main and tail rotors.The latter two control commands are the fl apping angles a,b,which represent the tilts of the tip-path-plane(TPP)at the longitudinal and lateral axes,respectively.The four control inputs are also depicted in Fig.1.In the following,we willgive the unmanned helicopter's translationaland rotationaldynamics,respectively. More details can be found in[6−7,10].
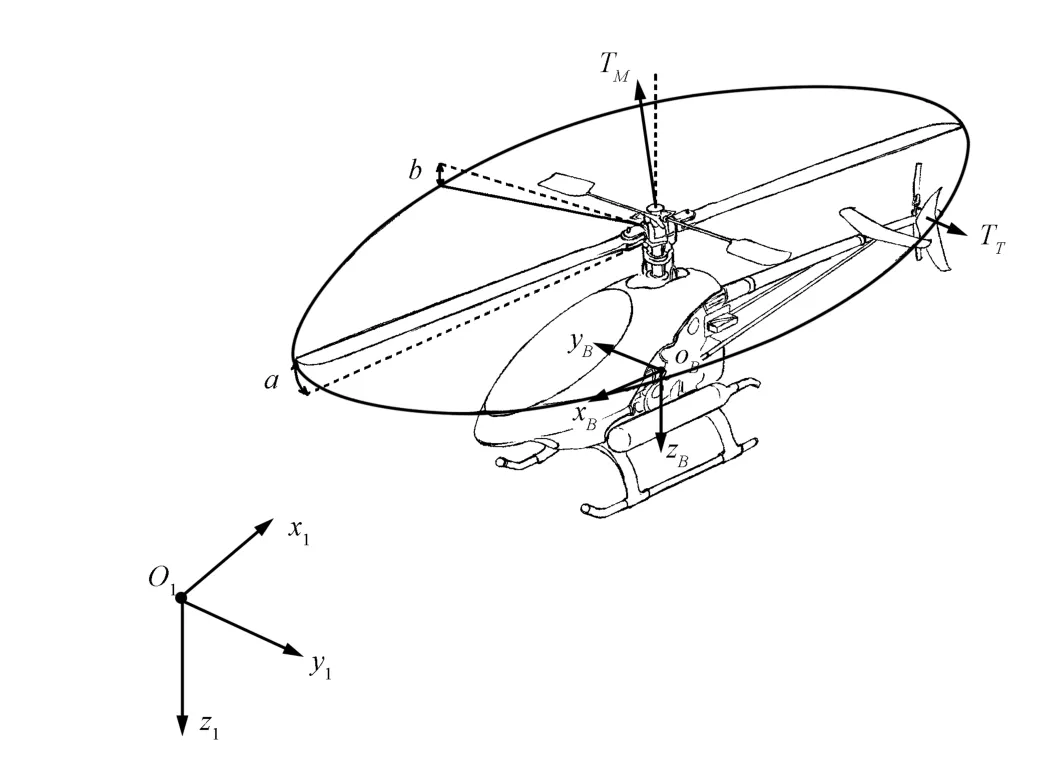
Fig.1. Coordinate systems for the helicopter.
A.Translational Dynamics
The kinematic and dynamic equations of unmanned helicopter's translational motion with respect to the inertial frame can be described as


Hereafter the abbreviations C·,S·and T·representthe trigonometric functions cos(·),sin(·)and tan(·),respectively.
B.Rotational Dynamics
The kinematic and dynamic equations of unmanned helicopter's rotational motion with respect to the body fixed framework can be described as


S¡ωB¢in(3)denotes a skew symmetric matrix,which is given by

J in(3)denotes the inertia matrix of the helicopter with respect to the body frame,which can be expressed as

vc=£b a TT⁄T,A(TM)∈R3×3represents an invertible matrix for TM,B(TM)∈R3represents a parameter vector for TM.
C.Control Objective
When the unmanned helicopteris in operation,load changes and other factors may cause the parametric uncertainties in the system dynamics.It will greatly affect the performance of conventional control method based on EMK.Thus the proposed controller combines the backstepping method with online parameter update laws to achieve the controlobjective. The main controlobjective is to design the four controlinputs u=£TMTTa b⁄Tin orderto asymptotically track the reference trajectories of xr(t),yr(t),zr(t)andψr(t)subject to model uncertainties of mass and moment coefficient.The components of xr(t)and yr(t)are required to be C4functions of time,zr(t)andψr(t)are required to be C2functions of time.
To deal with the subsequent control development,we make some assumptions as follows:
Assumption 2.TM>0 for t≥0.
The purpose of Assumption 1 is to assure the controlinput TMwhich will be designed in the following is non-singular. Obviously,this assumption is necessary to avoid singularities in angular velocity transfer matrix of(4).Similar assumption was applied in[7].The purpose of Assumption 2 is to assure the pseudo control rdwhich will be designed in the following is non-singular.Similar assumption was employed in[9].
III.FLIGHT CONTROL DESIGN
In order to achieve the control objective,the proposed controllerfollows adaptive backstepping design principles[15].For the purpose of improving the autonomous flightperformance, we employ adaptive backstepping technique to deal with the parametric uncertainties by using online parameter estimation laws.In this paper,we divide the helicopter's dynamic model into three subsystems,which are the altitude subsystem,yaw subsystem and horizontal subsystem.Since there is no strong coupling between these subsystems,the controller for each subsystem can be developed separately.
A.Altitude Subsystem
By elaborating(1),the vertical dynamics are described as

whereρijdenotes the element of jth row and ith column of the rotation matrix R.
Step 1.Let the altitude and vertical velocity tracking errors be defined as

where vIzddenotes the vertical velocity virtual control.By taking the time derivative of epz,the open-loop altitude tracking error dynamics can be obtained as follows:

Let the virtual control signal vIzdbe designed as

where k1∈ R is a positive,constant control gain.Then the closed-loop altitude tracking error dynamics will take the following form

Step 2.By taking the time derivative of evz,the open-loop vertical velocity tracking error dynamics can be written as follows:

On account of the mass uncertainty in the error dynamics,in this step we use the adaptive control law to estimate the unknown parameter on line.In order to facilitate the subsequent analysis,we make some changes to the corresponding terms of the right side of(12)as follows:

whereη1∈R represents the unknown mass of the helicopter. According to(13),we know that the unknown parameter satisfies the condition of linear parameterization(LP).Thus, the open-loop verticalvelocity tracking error dynamics can be revised into the following advantageous form

Here we design the general control input U as follows:

where k2∈R is a positive,constant control gain,ˆη1is the online estimation of unknown parameterη1.After combining (13)with(15),the real control input TMcan be derived as follows:

The adaptive updating law of unknown parameter can be designed as follows:

whereγ1∈R is a positive,constant adaptation gain.Substituting(15)into(14),we can derive the closed-loop vertical velocity tracking error dynamics as follows:

where˜η1= η1−ˆη1∈R denotes the unknown parameter estimation error.
In order to facilitate the subsequentsystem stability analysis, we define a Lyapunov function candidate,denoted by V1(t)∈R,as follows:

By taking the time derivative of(19)and making the appropriate substitutions from(11),(17)and(18),we derive the following expression

B.Yaw Subsystem
By elaborating(3),the yaw dynamics is described as

whereΨ3(Θ)is the third row of matrixΨ(Θ)defined in(4).
Step 3.Let the yaw angular and yaw angular velocity tracking error be defined as

whereωzdrepresents the yaw angular velocity virtual control. By taking the time derivative of eψ,we can derive the openloop yaw error dynamics as follows:
whereλψ∈R is a positive,constantcontrolgain.Substituting (24)into(23),we can getthe closed-loop yaw error dynamics as follows:

We define a Lyapunov function candidate for this subsystem,denoted by V2(t)∈R,as follows:

By take the time derivative of(26)and making the substitution from(25),we can derive the following equation:

C.Horizontal Subsystem
Since the lateral-longitudinaldynamics has strong coupling with the attitude dynamics,we focus ourattention on a cascade control structure constituted by an inner-loop controlling the attitude dynamics and a outer-loop governing the laterallongitudinal dynamics.In the following paragraphs,the proposed controller uses the adaptive backstepping design principles to deal with the horizontal subsystem with parametric uncertainties,which can be described in a parametric-purefeedback form[15].
The dynamics of the horizontalsubsystem,after elaborating (1)and(3),can be explicitly described as follows:


Step 4.Let the horizontal position and horizontal velocity tracking errors be defined as

where p1r=£xryr⁄T∈R2,v1drepresents the desired horizontal velocity.By taking the time derivative of ep1,we can derive the open-loop horizontal position tracking error dynamics as follows:

Letthe virtualcontrolinputforhorizontalvelocity be designed as follows:

where K3=diag(λ1,1,λ1,2)∈R2×2is a diagonal matrix of positive controlgains.Then the closed-loop horizontalvelocity tracking error dynamics will take the following form:

Step 5.By taking the time derivative of ev1,the open-loop horizontal velocity tracking error dynamics can be written as follows:

The corresponding term ofthe right-hand side ofthe dynamics equation(33),which includes the unknown parameter,can be linearly parameterized as

whereη2∈R represents the unknown mass of the helicopter. Thus,the error dynamics of(33)can be changed to

In this step,we take rdas the desired direction of the thrust vector,and define the orientation error as

Substituting(36)into(35),we can rewrite the open-loop horizontal velocity tracking error dynamics in the following form:

Here we design the orientation virtual control as follows:

where K4=diag(λ2,1,λ2,2)∈R2×2is a diagonal matrix of positive control gains,ˆη2is the online estimation of unknown parameterη2.The adaptive updating law ofunknown parameter can be designed as follows:

whereγ2∈R is a positive,constant adaptation gain.Substituting(38)into(37),we can derive the closed-loop horizontal velocity tracking error dynamics as:

where˜η2= η2−ˆη2∈R denotes the unknown parameter estimation error.
Step 6.By differentiating(36)with respectto time and substituting the orientation dynamics into the resulting equation, the open-loop orientation error dynamics can be written as follows:

In this step,we takeω1das the desired roll-pitch angular velocity vector,and define the roll-pitch angular velocity tracking error as:

Substituting(42)into(41),we can rewrite the open-loop orientation error dynamics in the following form

whereΠ0=£Π 02×1.Based on the form of the openloop dynamics of(43),the virtualcontrolinputω1dis designed as follows:

whereΛ1=diag(λ3,1,λ3,2)∈R2×2is a diagonal matrix of positive controlgains.Substituting(44)into(43)produces the closed-loop dynamics for er(t)as shown below

Step 7.Let the angular velocity tracking error be defined as follows:

Then the angular velocity tracking error dynamics will have the following form

On account of the inertia matrix uncertainty in the error dynamics,in this step we adopt adaptive control to estimate unknown parameters on line.In the same way,we make some changes to the corresponding terms of the right side of(47) as follows:


Here we design the general control inputτas follows:

whereΛ2=diag(λ4,1,λ4,2,λ4,3)∈ R3×3is a diagonal matrix of positive control gains,ˆΔ is the online estimation of unknown parametersΔ.Therefore,the choice of control input vcwill be

The adaptive updating law of unknown parameters can be designed as follows:

whereΓ3=diag(γ3,1,γ3,2,γ3,3)∈ R3×3is a diagonal matrix ofpositive adaptation gains.Substituting(51)into(50), we can derive the closed-loop angular velocity tracking error dynamics as

where˜Δ =Δ−ˆΔ ∈R3denotes the unknown parameters estimation error vector.
Similarly,we define a Lyapunov function candidate for this subsystem,denoted by V3(t)∈R,as follows:
By taking the time derivative of(55)and making the appropriate substitutions from(32),(39),(40),(45),(53)and(54), we derive the following expression:

IV.STABILITY ANALYSIS
Theorem 1.The control input TMof(16),vcof(52),the adaptive updating law ˆη1of(17),ˆη2of(39)andˆΔ of(53) can ensure the global asymptotic convergence of the position and yaw tracking errors as illustrated by

Proof.To prove the above result,we define a composite Lyapunov function candidate V(t)∈R as follows:

Taking the time derivative of(58),we can get the following inequality

whereλmin{·}denotes the minimum eigenvalue of a matrix.
According to the form of(59),we know that V(t)is either decreasing or constant.Since V(t)of(58)is a non-negative function,we can conclude that V(t)∈L∞.According to(58), we know that epz,evz,eψ,ep1,ev1,er,eω,˜η1,˜η2,˜Δ ∈ L∞. From(11),(17),(18),(25),(32),(39),(40),(45),(53),(54), we know that˙epz,˙evz,˙eψ,˙ep1,˙ev1,˙er,˙eω,˙ˆη1,˙ˆη2,˙ˆΔ ∈ L∞. Thus,we have illustrated that all signals in the adaptive backstepping controller and in the system remain bounded during the closed-loop operation.Furthermore,the form of (59)allows us to show that epz,evz,eψ,ep1,ev1,er,eω∈L2. With the above information,we can now invoke Barbalat's lemma[16]to achieve the result of(57).Form(16)and(52), we know that TM,vc∈L∞. □
V.SIMULATION RESULTS
This section presents the simulation results of the control algorithm.The helicopter model parameters are taken form [7].The desired position and yaw reference trajectories are

The initial states of the helicopter are set to 0.The initial values for parameterestimation are setasˆη1(0)=ˆη2(0)=8, ˆδ1(0)= ˆδ2(0)= ˆδ3(0)= 0.The control gains are chosen as k1= 0.9,k2= 1.5,K3= diag{0.4,0.4}, K4=diag{1,1},Λ1=diag{1,2},Λ2=diag{1,1,1}, λψ=1.The adaptation gains are selected asγ1=0.32, γ2=1,Γ3=diag{7,7,1 700}.The position and yaw tracking errors are illustrated in Fig.2.The four control inputs are provided in Fig.3.The parameter estimations can be seen in Fig.4.Itcan be seen thatthe satisfactory tracking performance is achieved in the presence of parametric uncertainties.

Fig.2. Position and yaw tracking errors.
VI.CONCLUSION
This paper has presented an adaptive backstepping control design forthe unmanned helicopterassociated with parametric uncertainties of helicopter's mass and moment coefficients.In order to facilitate the controldesign,we divide the helicopter's dynamic model into three subsystems,which are altitude subsystem,yaw subsystem and horizontal subsystem.Since there is no strong coupling between these subsystems,the controllerforeach subsystem can be developed separately.Theproposed controller combines the backstepping method with online parameter update laws to achieve the controlobjective. The GAS of the closed-loop system is rigorously proved by the Lyapunov based stability analysis.
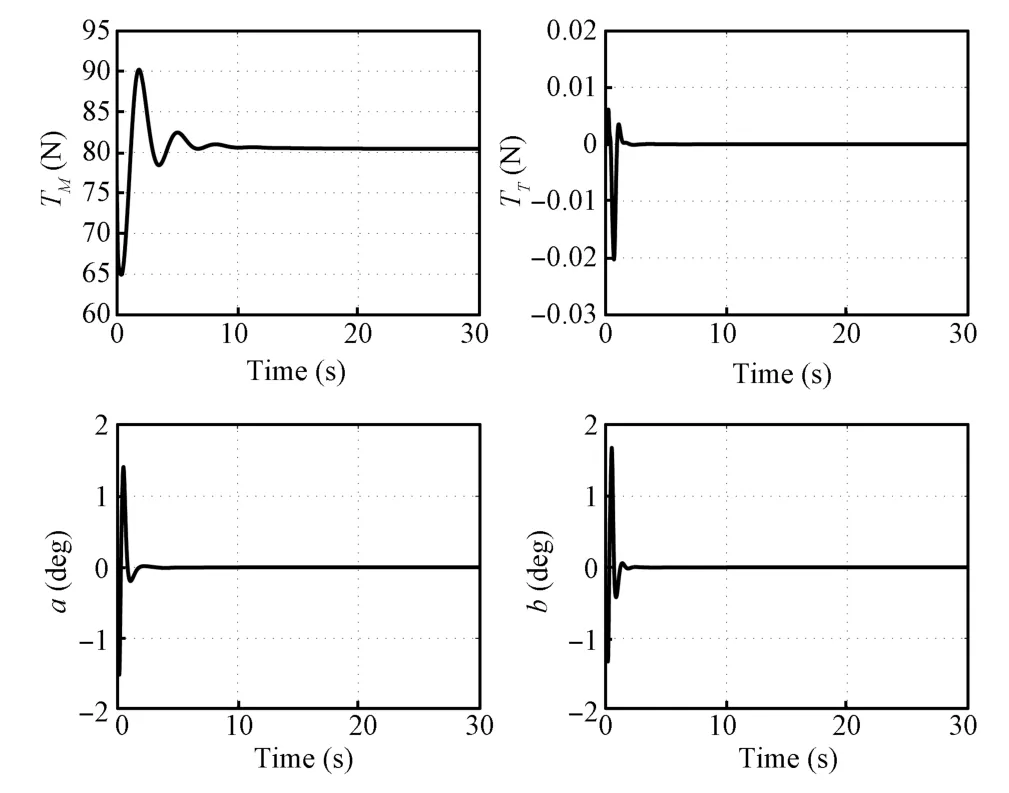
Fig.3.Control inputs of TM,TT,a and b.

Fig.4.Parameter estimations of mass and moment coefficients.
In this paper,we have not considered the parametric uncertainties associated with the input matrix of A(TM)and B(TM).In order to ensure the robust performance of the unmanned helicopter system,we should combine the adaptive controlmethod with robustcontrolmethod to achieve superior control performance in the future research.
REFERENCES
[1]Cai G W,Chen B M,Lee T H.Unmanned Rotorcraft Systems.London: Springer-Verlag,2011.1−5
[2]Shim D H,Kim H J,Sastry S.Control system design for rotorcraftbased unmanned aerialvehicles using time-domain system identification. In:Proceedings of the 2000 IEEE International Conference on Control Applications.Anchorage,USA:IEEE,2000.808−813
[3]Gavrilets V.Autonomous Aerobatic Maneuvering of Miniature Helicopters[Ph.D.dissertation],Massachusetts Institute of Technology, Boston,USA,2003.
[4]La Civita M,Papageorigious G,Messner W C,Kanade T.Design and flighttesting of a gain-scheduled H∞loop shaping controller for wideenvelope flight of a robotic helicopter.In:Proceedings of the 2003 American Control Conference.Denver,USA:IEEE,2003.4195−4200
[5]Takahashi M D,Schulein G,Whalley M.Flight control law design and development for an autonomous rotorcraft.In:Proceedings of the 64th American Helicopter Society International Annual Forum.Montreal, Canada:AHS International,Inc.,2008.1652−1671
[6]Koo T J,Sastry S.Output tracking control design of a helicopter model based on approximate linearization.In:Proceedings of the 37th IEEE Conference on Decision&Control.Tampa,USA:IEEE,1998. 3635−3640
[7]Raptis I A,Valavanis K P,Moreno W A.A novel nonlinear backstepping controller design for helicopters using the rotation matrix.IEEE Transactionson Control System Technology,2011,19(2):465−473
[8]Ahmed B,Pota H R.Flight control of a rotary wing UAV using adaptive backstepping.In:Proceedings of the 2009 IEEE International Conference on Control and Automation.Christchurch,New Zealand: IEEE,2009.1780−1785
[9]Isidori A,Marconi L,Serrani A.Robust nonlinear motion control of a helicopter.IEEE Transactions on Automatic Control,2003,48(3): 413−426
[10]Marconi L,Naldi R.Robust full degree-of-freedom tracking control of a helicopter.Automatica,2007,43(11):1909−1920
[11]Shin J H,Kim H J,Kim Y D,Dixon W E.Autonomous flight of the rotorcraft-based UAV using RISE feedback and NN feedforward terms.IEEE Transactions on Control System Technology,2012,20(5): 1392−1399
[12]Sugeno M,Hirano I,Nakamura S,Korsu S.Development of an intelligentunmanned helicopter.In:Proceedings ofthe 4th IEEE International Conference on Fuzzy Systems.Yokohama,Japan:IEEE,1995.33−34
[13]Johnson E N,Kannan S K.Adaptive trajectory control for autonomous helicopters.Journal of Guidance,Control,and Dynamics,2005,28(3): 524−538
[14]Lee T Y.Geometric tracking control of the attitude dynamics of a rigid body on SO(3).In:Proceedings of the 2011 American Control Conference.San Francisco,USA:IEEE,2011.1200−1205
[15]Kanellakopoulos I,Kokotovic P V,Morse A S.Systematic design of adaptive controllers for feedback lineatization systems.IEEE Transactionson AutomaticControl,1991,36(11):1241−1253
[16]Slotine J E,Li W P.Applied Nonlinear Control.Englewood Cliffs: Prentice Hall,1991.122−126

Bin Xian Ph.D.,professor at the School of Electrical Engineering and Automation,Tianjin University.His research interests include nonlinear control theory and application,unmanned aerial vehicles, mechatronic systems,and real-time embedded systems.Corresponding author of this paper.

Jianchuan Guo Ph.D.candidate at the School of Electrical Engineering and Automation,Tianjin University.His research interests include modeling and controlofunmanned helicopters,and embedded control system.

Yao Zhang Ph.D.candidate atthe Schoolof Electrical Engineering and Automation,Tianjin University.His research interests include nonlinear control for mechatronic systems.
t
October 10,2013;accepted July 18,2014.This work was supported by Natural Science Foundation of Tianjin(14JCZDJC31900). Recommended by Associate Editor Changyin Sun
:Bin Xian,Jianchuan Guo,Yao Zhang.Adaptive backstepping tracking control of a 6-DOF unmanned helicopter.IEEE/CAA Journal of Automatica Sinica,2015,2(1):19−24
Bin Xian,Jianchuan Guo,and Yao Zhang are with the Institute of Robotics and Autonomous System,Tianjin Key Laboratory of Process Measurement and Control,School of Electrical Engineering and Automation, Tianjin University,Tianjin 300072,China(e-mail:xbin@tju.edu.cn;e-mail: gjch@tju.edu.cn;zytju221@tju.edu.cn).
 IEEE/CAA Journal of Automatica Sinica2015年1期
IEEE/CAA Journal of Automatica Sinica2015年1期
- IEEE/CAA Journal of Automatica Sinica的其它文章
- Autonomous Landing of Small Unmanned Aerial Rotorcraft Based on Monocular Vision in GPS-denied Area
- Continuous Sliding Mode Controller with Disturbance Observer for Hypersonic Vehicles
- A Predator-prey Particle Swarm Optimization Approach to Multiple UCAV Air Combat Modeled by Dynamic Game Theory
- Guest Editorial for Special Issue on Autonomous Control of Unmanned Aerial Vehicles
- Finite-time Attitude Control:A Finite-time Passivity Approach
- Decoupling Trajectory Tracking for Gliding Reentry Vehicles