
基于Boost PFC的电动汽车充电机的设计与实现
2015-08-10 12:47全书海
湖北工业大学学报 2015年4期
张 宁,袁 博,全书海
(武汉理工大学自动化学院,湖北武汉430070)
随着电动汽车行业的快速发展,电动汽车相配套的充电机设备也将成为一个新兴的产业,其发展前景日新月异[1-2]。功率因数校正技术(Power Factor Correction,简称PFC)的主要目的是使输入端的电网电流正弦化并和输入电网电压同相位,且消除谐波[3]。在理想情况下,功率因素校正可以使电器设备的负载特性表现为纯电阻特性,其从电网吸收的电流仅为有功电流,这不仅将使损耗和成本降至最小,也减少了对其他设备的干扰[4-6]。交错并联系统不仅具有并联运行系统的所有优点,由于提高了输出电流纹波的频率,交错并联系统还能够降低对滤波电容以及磁性元件的要求,从而提高整个系统的功率密度[7-8]。本文综合考虑了PFC电路的工作特性、充电机的性能指标以及效率因素等性能要求,结合Boost PFC电路与Buck电路,为了进一步减小电压和电流纹波、减小电磁干扰、提高充电机的效率,采用了交错并联技术。
1 充电机主电路拓扑
在采用开关电源的传统的充电器电路拓扑中,有各种各样的变换器电路,但其基本类型实际只有正激式、反激式、推挽式、半桥式和全桥式这5种[9]。与传统的充电机单一的拓扑结构相比,本文设计的充电机主要由2部分构成:一部分是AC-DC部分,即有桥型的交错并联Boost PFC电路;另一部分是DC-DC部分,即交错并联的Buck电路。图1为充电机的拓扑结构图。
图1中二极管整流桥,电感L1、L2,MOS开关管Q1、Q2以及二极管D1、D2构成了交错并联的 Boost PFC 电路。MOS 开关管 Q3、Q4,二极管 D3、D4以及电感L3、L4构成了交错并联的Buck电路。C1和C2为滤波电容。
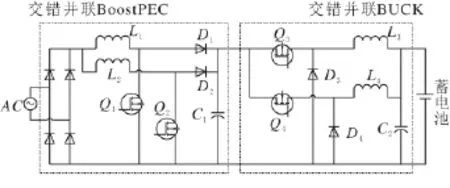
图1 充电机拓扑结构图
2 交错并联Boost PFC的设计
设计PFC电路是为了使输入端的的电网电流正弦化并和输入电网电压同相位,而且消除谐波,本文中Boost PFC的主要技术指标及参数:输入电压,220VAC±15%;输入频率,50Hz;输出电压,440VDC;开关频率,100 kHz;两相电感量,980 uH,985 uH;输出电容,840 uF。
2.1 交错并联Boost PFC的工作原理
本文中,交错并联Boost PFC主电路为两相交错并联(图2)。

图2 两相交错并联Boost PFC电路图
图中两个Boost变换器并联连接,目的是在控制上实现两个Boost PFC均匀分担输入电流,减小开关管的电流应力。同时,使两个高频PWM开关在相位上错开180°,实现高频电感电流的交错,减小了输入电流的高频纹波、输入滤波器的差模电感以及前级EMI滤波器的尺寸[10]。

图3 交错并联Boost PFC工作状态图
交错并联Boost PFC在电感电流连续模式下,电路可能出现四种工作状态(图3):(a)开关管Q1、Q2同时导通时,电感电流iL1、iL2增大,输出电容为负载提供能量;(b)开关管Q1开通,Q2关断,电感电流 iL1增大,iL2减小;(c)开关管 Q1、Q2同时关断,电感电流iL1、iL2均减小,输出电容储存能量;(d)开关管 Q2开通,Q1关断,电感电流 iL2增大,iL1减小。
当交流电压的绝对值增大时,电感电流波形见图4,t0到t1时刻,PFC电路工作在(a)状态,两相电感电流均增大;t1到t2时刻电路工作在(b)状态,电感电流iL1增大,iL2减小,且iL2下降趋势强于iL1上升趋势;t2到t3时刻,电路工作在(a)状态,两相电感电流均增大;t3到t4时刻电路工作在(b)状态,电感电流iL1增大,iL2减小,且iL2下降趋势强于iL1上升趋势。

图4 交流电压的绝对值增大时的电流波形
当交流电压的绝对值减小时,电感电流如图5所示,t0到t1时刻电路工作在(b)状态,电感电流iL1增大,iL2减小,且iL1上升趋势强于iL2下降趋势;t1到t2时刻,PFC电路工作在(c)状态,两相电感电流均减小;t2到t3时刻,电路工作在(b)状态,且iL1上升趋势强于iL2下降趋势;t3到t4时刻,电路工作在(c)状态,两相电感电流均减小。由上图可知两个电感电流相互叠加后,总体电流纹波减小。
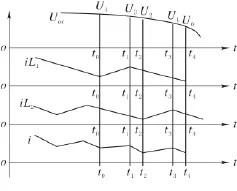
图5 交流电压的绝对值减小时的电流波形
2.2 PFC数字控制器的设计
平均电流控制是在峰值电流控制基础上发展起来的一种电流型控制方法,它们都是双环控制系统,即一个电压控制环和一个电流控制环。电压控制环使Boost电路输出的电压稳定,电流控制环使输入电流更接近正弦波[11]。
在交错并联Boost PFC电路中,为执行平均电流控制算法,需要输入4个信号,即交流输入电压Vac,电感电流 iL1、iL2和 PFC输出电压 Uo(图6)。Kf、Ks1、Ks2和Kd增益块替代了先前各自的电压和电流感测与调节电路。瞬时信号Vac、iL1、iL2和Uo通过各自的采样电路被检测,检测的信号经过模数转换送入到数字控制器中。数字化的PFC输出电压Uo与期望的PFC输出电压Vref相比较得到一个差分信号,然后将这个差分信号馈入到数字化的电压环路PI控制器Gvea。“B”为电压环路 PI控制器 Gvea的输出,其目的是维持PFC输出电压的稳定。“A”为取绝对值后的交流电压数字瞬时信号,它决定了电感电流的波形。“A”与“B”的乘积决定了内部电流环路的参考电流信号Iref。Iref与iL1、iL2的差值分别进入电流PI控制器Gca1、Gca2。电流PI控制器的输出最后经过PWM模块产生PWM占空比命令。

图6 数字控制的PFC控制环路框图
在一个交流周期中,开关管开通时,电感电流增大,关断时,电感电流减小。在一个开关周期中,当输入电压平均值的绝对值比上一个开关周期大时,电感电流在该开关周期中的平均值也呈增大趋势;当输入电压平均值的绝对值比上一开关周期小时,电感电流在该开关周期中的平均值也呈减小趋势,最后得到类似于正弦半波的波形,交流输入电流也呈现类似于正弦波的波形(图7)。

图7 交错并联PFC电压波形与电流波形
2.2.1 电流环路设计 由于交错并联Boost电路中每相电路结构基本相同,因此,电流环路控制器可分析其中一相。在输出电压完全跟踪电压给定且恒定不变的情况下,每相电感两端的电压在一个开关周期内的平均值

开关频率远大于输入电压频率的情况下,对式(1)施加小信号扰动

对式(2)进行拉式变换可得到电流环功率级传递函数
电流PI控制器传递函数

式中,Kp1为比例系数;Ki1为积分系数;Ti1为积分时间常数。
电流环路的开环传递函数

要保证系统稳定运行,电流环必须有足够的带宽是输入电流跟踪电流给定,要求电流环路PI控制器的“零点”配置应远小于电流环截止频率,满足系统的相角裕度不少于45°,“零点”可选为电流环截止频率1/10左右,即10 kHz。由

得
将电流环路PI控制器零点设置在1 kHz,得

因此
所以 Kp1=4.196,Ki1=26225。
2.2.2 电压环路设计 电压环的功率级传递函数
电压PI控制器的传递函数

电压环开环传递函数

为了抑制输出电压二次纹波对电压环的影响,电压环的开环截止频率取10 Hz,相角裕度为45°。由
得

将电压环路PI控制器零点设置在10 Hz,积分时间常数

因此
所以 Kp2=8.287,Ki2=517.938。
3 交错并联Buck电路的设计
3.1 交错并联Buck的工作原理
设计Buck电路是为了使充电机的输出能满足电动汽车电池的充电要求。本文中,交错并联Buck电路为两相交错并联,开关频率100 kHz,电感L3与L4的电感量分别为740 uH、741 uH,输出电压为336 VDC。输出电容为1500 uF。电路的工作状态见图8。
在电感电流连续模式下,交错并联Buck电路可能出现四种工作状态:a)Q3触发开通,D4续流,Q4截止,L3储存能量同时电流上升,C充电;b)Q3,Q4均触发开通,L3,L4储存能量同时电流上升,C充电;c)Q4触发开通,D3续流,Q3截止,L4储存能量同时电流上升,C 充电;d)Q3,Q4均截止,D3,D4续流,L3,L4的电流减小,C放电。
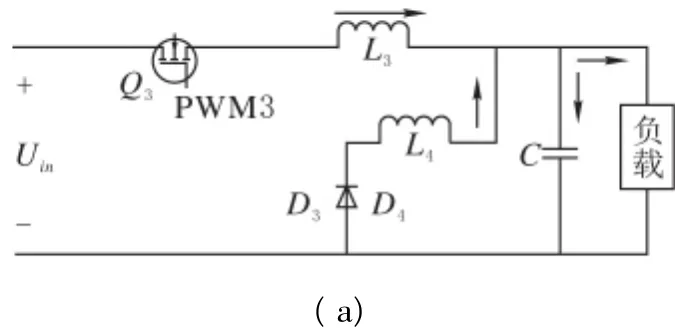

图8 交错并联Buck电路工作状态图
3.2 交错并联Buck数字控制器的设计
交错并联Buck电路的平均电流控制由2个环路构成,即一个电压外环和电流内环。为执行数字控制算法,需要4个输入信号,输入电压信号,两路电感电流信号和输出电压信号。在设计时,由于每相电感参数基本一致,因此环路的控制可单独分析其中一相。系统框图见图9。

图9 Buck电路的系统框图
在输出电压完全跟踪电压给定且恒定不变的情况下,一个开关周期内电感电压的平均值

在式(3)施加小信号扰动,并进行扰动分离,得

对式(4)进行拉氏变换,得到电流环功率级的传递函数
电压环功率级的传递函数为

电流环PI调节器与电压环PI调节器的传递函数分别为

式中,Kp3为比例系数;Ki3积分系数;Ti3为积分时间常数。

式中,Kp4为比例系数;Ki4为积分系数;Ti4为积分时间常数。
将电流环截止频率设置在10 kHz,即fci=10 kHz;零点设置在 1 kHz,即 Ti3=16 ×10-5。由式(5)、(7)得-5

所以Kp3=3.098,Ki3=19363,将电流环截止频率设置在10 Hz,即fci=10 Hz;零点设置在100 Hz,即Ti4=0.0016。
由式(6)、(8),
所以 Kp4=94.566,Ki4=59103.75。
4 仿真分析与实验结果
4.1 仿真分析
本文利用PSIM软件建立仿真电路,对前文所设计的电路及控制参数进行仿真分析,验证了电路设计的正确性。220 V单相交流电输入,PFC输出电压为440 V,直流输出电压为336 V,输出功率为3.6 kW,所带负载为固定功率负载。仿真结果见图10、图11。
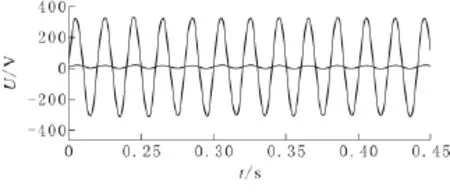
图10 输入电压与输入电流波形
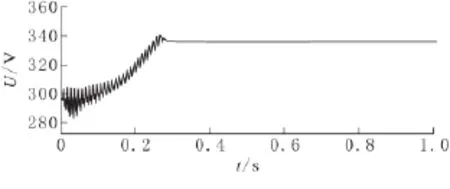
图11 输出电压波形
从仿真波形来看,输入电流在相位上跟踪了输入电压的波形,且保持了很好的正弦特性。输入的功率因素达到了0.9以上。输出电压稳定在336 V左右,体现了良好的稳定性。
4.2 实验结果
图12为输入电压波形与两相电感电流波形,从图中可以看出,两相电感电流波形均为正弦半波,在相位和幅度上基本保持一致,表明流过两相电感的电流大小基本相同,实现了两相均流;与输入电压波形相比较,电感电流波形能够很好地跟踪输入电压波形的相位,表明在交流输入端输入电流能够很好地跟踪输入电压的相位。
图13为输入电压波形与输入电流波形,从图中可以看出输入电流具有良好的正弦特性,且相位与输入电压的相位基本一致,输入电流的幅值约为每相电感电流幅值的两倍,在输出功率为2 kW时,其输入功率因素达到0.99。
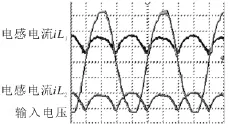
图12 输入电压波形与电感电流波形
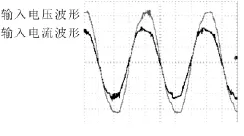
图13 输入电压波形与输入电流波形

表1 电路效率分析表
表1为实验电流在不同负载时的效率表。从表中可以看出,在轻载时,电路整体效率偏低,且随负载阻值的减小输出功率逐渐提升,在接近满载时输出效率保持稳定。
5 结论
针对交错并联的平均电流型Boost PFC电路与交错并联的Buck电路,分析了其数字化实现的方法和原理,并将其应用于电动汽车充电系统中,同时对该电路进行了仿真和实验验证。仿真和实验结果表明前述理论分析和建模是正确的,依据理论模型计算出的PI参数是正确的。交错并联的应用使得电流纹波减小,增大了电流纹波的频率,降低了系统对硬件电路的需求。整个系统达到了设计要求,输入功率因素达0.99,系统效率达0.92,证明了该数字系统的可行性与高效节能性。
[1] 周鹤良.中国电动汽车发展状况及建议[J].中国机电工业,2001(19):19-22.
[2]曹云平.电动车动力电源的发展现状[J].化工时刊,2001(10):13-16.
[3] Abraham I Pressman.开关电源设计[M].第三版.北京:电子工业出版社,2013:427-434.
[4] 朱士海.一种新型高性能功率因素校正整流电路[J].电工电能新技术,2003,22(02):68-71.
[5]王 虎.交错并联数字APFC的研究[J].电气自动化,2011,33(04):54-57.
[6]张明丹.单相功率因数校正的数字控制[D].重庆,重庆大学,2005.
[7] 王山山.交错并联Boost PFC变换器的研究[D].浙江:浙江大学,2010.
[8] 王 蕊.交错并联Buck变换器本质安全的研究[J].电力电子技术,2011,45(07):117-120.
[9]江友华.电动汽车智能充电器的设计与实现[J].电力电子技术.2012,46(02):38-40.
[10]Gitau M N.Modeling conducted EMI noise generation and propagation in boost converters[C].Puebla,IEEE,2000:353-358.
[11]赵 岩.一种带零电流软开关的交错并联Boost PFC电路的研制[D].广西大学,2012.
猜你喜欢
科教导刊·电子版(2022年5期)2022-03-19
水泥工程(2020年4期)2020-12-18
现代防御技术(2017年2期)2017-05-13
光学精密工程(2016年4期)2016-11-07
电子世界(2016年18期)2016-10-24
电测与仪表(2016年1期)2016-04-12
电测与仪表(2016年2期)2016-04-12
通信电源技术(2016年4期)2016-04-04
自动化博览(2014年9期)2014-02-28
现代防御技术(2014年6期)2014-02-28
