下承自行式移动模架过连续梁施工工艺研究
2015-08-03 08:47:28肖植可朱耀光
黑龙江交通科技 2015年7期
肖植可,朱耀光
(中铁八局昆明铁路建设有限公司)
1 下承自行式移动模架概述
下承自行式移动模架分为两种,第一种为PC 梁位于支架主梁之下的移动模架,第二种为模架主梁在PC 梁之上纵移的移动模架,采用的是第一种,其构成主要如下:主框架总成、墩旁托架、移位台车、前辅助支腿、中辅助支腿、后辅助支腿、外模系统、内模系统、附属设施、桥面走道及操作平台、液压系统、电气系统。
2 技术难点及工作原理
2.1 需解决的技术难点
(1)如何解决过连续梁时移动模架自身支撑受力问题
下承自行式移动模架操作时,自身重量在前辅助支腿、中辅助支腿、后辅助支腿、支撑托架直接相互转换,施工期间由前墩旁托架、后墩旁托架支撑,脱模时前、后墩旁托架承重油缸完全回收,此时主框架及模板的重量转换由前中后辅助腿支撑;利用纵移油缸顶推前、后墩旁托架前进至下一桥墩就位;前、后墩旁托架上的横移油缸顶推使前、后墩旁托架与桥墩就位后解除中辅助支腿、前辅助支腿支撑;后辅助支腿、后墩旁托架、前墩旁托架的油缸回收使移动模架主梁底部的轨道落放在支撑滑道上;而这相互转换需要通过导梁及主梁进行传导,在过连续梁时,因连续梁的两跨跨度远远大于2倍普通简支梁的跨度,也就是大于移动模架导梁加上主梁的长度,过时主梁和导梁无法像过普通简支梁那样就位在支撑托架上,也就无法实现这种转换,因此必须提供一个新的支点,确保过孔时移动模架自身的安全转换。
(2)如何解决过连续梁纵移动力驱动
下承自行式移动模架过孔时的动力驱动为固定在支撑托架上纵移油缸,透过设在主梁及导梁下底面的孔板顶推主梁和导梁纵向移动,而在过连续梁时,因连续梁的两跨跨度超过2 倍普通简支梁的跨度,也就是大于移动模架导梁加上主梁的长度,过时主梁和导梁无法像过普通简支梁那样就位在支撑托架上,也就无法利用支撑托架上纵移油缸产生纵移推力,此时,必须重新增加新的动力设备。
2.2 工作原理
(1)改造原理
通过对移动模架中辅助支腿长度及高度的改造,将过孔时的承载系统由原来的后辅助支腿+墩旁托架组合转换成后辅助支腿+中辅助支腿组合,同时在中辅助支腿下方增设C 梁走行机构,将纵移动力从原来墩旁托架上的纵移油缸提供转换由新增的中辅助支腿电机提供。
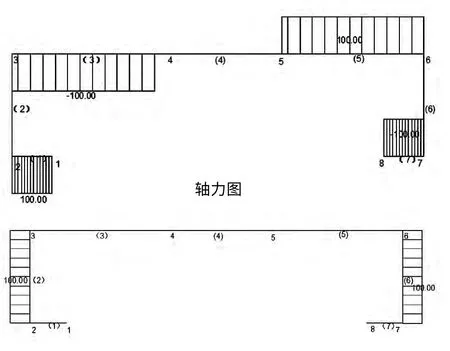
(2)改装后中辅助腿受力检算
①受力模型如下图

弯矩图

剪力图
②横梁加长段箱型截面参数:

横梁加长段箱型截面参数
截面面积:A=73 200 mm2,惯 性 矩:IX=3.58 ×1010mm4,IY=7.34 ×1010mm4,
截面系数:WX=3.979 × 107mm4,WY=1.835 ×1010mm4
正应力σ=弯矩/截面系数=M/WX=560 ×107/3.979×107=140.7 MPa <[σ]=170 MPa(满足要求)
剪应力τ=剪力/2x 截面高度×单侧截面厚度=Q/2h0h=100 ×104/2 ×1 760 ×10=28.4 MPa
③未加高段处截面计算

箱型截面参数
截面面积:A=49 200 mm2,惯性矩:IX=7.256 ×109mm4,IY=4.19 ×109mm4,
截面系数:WX=1.61 ×107mm4,WY=1.05 ×107mm4
未加高段处最大弯矩:Mmax=214t.m 剪力:Q=100 t
正应力σ=最大弯矩/截面系数=Mmax/WX=214 ×107/1.61 ×107=132.9 MPa <[σ]=170 MPa(满足要求)剪应力τ=剪力/2x 截面高度× 单侧截面厚度=Q/2h0δh=100 ×104/2 × 860 × 10=58.1(满足要求)
3 工艺流程
总个过连续梁工艺流程如下:移动模架现浇梁初张拉完成→主梁落回滑道→利用墩旁托架上的横移油缸横向开启主梁→后辅助支腿支撑千斤顶及其走行系统就位→安装中辅助支腿曲臂增长段→安装中走行C 梁走行机构→调整后辅助支腿竖向千斤顶使中、后辅走行系统落回走行轨道(此时整个移动模架自身重量由中、后辅助支腿承担,墩旁托架不在承担)→拆除导梁(此步骤主要考虑曲线半径较小的桥梁,非曲线段或者曲线半径较大时可以不拆除)→调整墩旁托架上的竖移油缸将主梁与墩旁托架脱离→解除对拉精轧螺纹钢筋并利用横向顶推油缸将墩旁托架与墩身分离→整体拆除前后墩旁托架移至下一孔简支梁墩柱位置并安装就位(此步骤主要是减轻移动模架自身重量,减少走行机构承担的重量,也可以将墩旁托架倒挂在主梁上,但必须对走行机构进行局部加强)→开启中辅助支腿上的电机驱动将移动模架纵向移至连续梁端头位置→将移动模架主梁落回墩旁托架上方并将其上纵移油缸与主梁连接到位→拆除中辅助支腿曲臂增长段及中走行C 梁走行机构→安装导梁并将前墩旁托架与导梁连接到位→利用前后墩旁托架上方纵移油缸透过设在主梁及导梁下底面的孔板顶推主梁和导梁纵向移动倒施工位→横向合拢再次形成施工平台。
4 控制要点
4.1 中辅助支腿曲臂增长段及C 梁走行机构安装
中辅助支腿曲臂增长段及C 梁走行机构安装是总个施工过程的关键步骤,总个安装过程必须严格按照厂家操作规程进行安装,采用螺栓的位置连接必须采用扭力扳手进行,采用焊接连接的位置严格控制焊缝的质量,系统走行前,必须对所有的电机进行检查,确保运转方向、运转速度达到统一才进行下一道工序的操作。
4.2 承载系统的转换
总个施工过程中,经过了两次承载系统的转换,第一次承载系统的转换由原来的后辅助支腿+墩旁托架组合转换成后辅助支腿+中辅助支腿组合,第二次重新将其转换回来,总个转换过程,通过设备自带的4 个竖向千斤顶完成,操作过程必须严格控制千斤顶的操作油泵,建议在千斤顶上增设智能系统,由电脑同步控制,如现场无法实现,则必须由专人指挥四个油泵的操作,使他们达到绝对的统一,避免因为操作失误出现偏压,导致移动模架倾覆或者损坏千斤顶及走行系统。
5 结 语
通过佛肇城际铁路桂丹立交特大桥下承自行式移动模架自行通过(30 m +45 m +30 m)现浇连续梁的工程实例,详细的介绍了下承自行式移动模架在通过连续梁时的需进行的改造及施工全过程,具有极强的可操作性,对类似工程有着积极的指导意义。
[1]黄成造,项贻强,张少锦.移动模架设计、施工与养护技术指南[M].人民交通出版社,2009.
[2]桥梁设计常用数据手册[M].人民交通出版社,2005.
猜你喜欢
机械工程师(2024年1期)2024-01-20 10:53:52
商用汽车(2024年2期)2024-01-01 00:00:00
中国核电(2021年3期)2021-08-13 08:57:00
建材发展导向(2021年13期)2021-07-28 07:14:46
辽宁师专学报(自然科学版)(2021年1期)2021-07-21 03:17:04
中国科技纵横(2020年5期)2020-06-29 08:01:48
凿岩机械气动工具(2017年3期)2017-11-22 07:21:56
中国科技纵横(2016年23期)2017-04-06 22:14:26
工业设计(2016年6期)2016-04-17 06:42:51
科技创新导报(2015年5期)2016-01-12 03:00:55