
粒子群算法的改进算法研究
2015-07-21 17:53魏晓艳
科技资讯 2015年16期
关键词:自适应
魏晓艳

摘 要: 粒子群优化算法(Particle Swarm Optimization,PSO)是一种高效、动态的优化算法,该算法比较容易实现,也无需调整太多的参数;然而算法后期收敛速度慢,最主要的是易陷入局部极值,为了改善这些缺点,学者们纷纷提出了许多改进的算法,并将其已经应用于科学和工程等多个领域。本文主要是在基本PSO的基础上进行改进,提出了一种新的改进算法—LPSO。最后通过仿真实验证实,改进后的算法在收敛速度和收敛精度上都得到了很大提高。
关键词:粒子群 自适应 早熟收敛 交叉操作
中图分类号: TP301.6 文献标识码:A 文章编号1672-3791(2015)06(a)-0000-00
Research on improved algorithm of particle swarm optimization
WEI Xiaoyan
(School of Engineering, Xi'an Siyuan University, Xian 710038,china)
Abstract: Basic PSO is an efficient and dynamic optimization algorithm, it is easy to achieve and don't need too much parameters adjustment; however, it has slow convergence, easily failing to local extreme values, in order to improve these disadvantages, some scholars have put forward a lot of improved PSO. In this paper, we introduce an improved PSO, and then prove it effective .
Key words: PSO; adaptation; Local convergence; crossover operation;
1 引言
在现实生活中,无论从事什么样的职业,都会遇到优化问题。随着科技的不断发展、世界的不断变化,早前一些静态的、传统的方法,如单纯形法、共轭梯度法、模式搜索法以及牛顿法等,已经不能够很好的处理一些复杂的问题,于是动态的、高效的粒子群算法(PSO)便成为了众多学者研究的热点【1】。
基本PSO算法虽然比较简单,实现相对容易,不需要调整太多的参数,同时算法的早期收敛速度也比较快;但算法后期会受到随机振荡现象的影响,导致算法搜索到全局最优解的时间比较长,减慢
了收敛速度;并且在一定程度上使其局部搜索能力表现较差,极易陷入局部最小值,精度降低,易发
散【2】。针对基本粒子群算法的收敛精度问题,本文提出了一种新的改进粒子群优化算法—LPSO。
2 改进PSO算法研究
2.1 基本PSO算法
随机初始一群粒子,每个粒子均不包括体积和质量信息,将每个粒子都看作为优化过程中的一个可行解,粒子的好坏通过一个事先设定好的适应度函数来进行确定。优化过程中,每个粒子都将在可行解空间中进行运动,由一个速度变量决定其方向和距离。通常情况下粒子将追随当前的最优粒子,并经过不断的迭代搜索最后得到全局最优解。在每一次迭代过程中,粒子都将会跟踪两个最优值:一个是粒子本身迄今为止找到的最优解,即局部最优解;另一个是整个粒子群体到目前为止找到的最优解,即全局最优解【3】。
假设一个由个粒子组成的粒子种群在维的
搜索空间中按照一定的速度进行飞行。粒子在时刻的状态属性设置如下:
位置:
其中为搜索空间的下限,为搜索空间的上限;
速度:
其中:为最小速度,为最大速度;
个体最优值位置:
全局最优值位置:
其中:,。
那么粒子在t+1时刻的位置可以通过下式来得到:
(1)
式中,、都为均匀分布在(0,1)区间的随机数;、是学习因子,一般取2。
基本的PSO算法尽管比较简单,实现也相对容易,并且不需要调整太多的参数,早期收敛速度快;但同时也存在其局限性,由于粒子在移动时没有选择性,即使下一个粒子位置的评价函数值较差,粒子还是利用逐个位置来代替当前位置,这样就使得粒子很容易跳出最优解附近的某一邻域,因此在一定程度上表现出较差的局部搜索能力,比较容易陷入局部最小值,降低了精度,也易发散【4】。鉴于基本粒子群算法还存在一些不足之处,本文提出了一种新的改进的粒子群算法,下面将对其做具体介绍。
2.2 粒子群算法的改进算法研究
本文所提出的改进的粒子群算法主要是在基本粒子群算法基础上,对以下几个方面做了改进:
1)惯性权重模型
由于惯性权重较大时,算法具有较强的全局搜索能力;较小时,则算法局部搜索能力较强。所以本文中采用线性模型,随着迭代次数的增加,将由初始的0.9线性递减至0.4,以达到期望的优化目的。权重函数由下式确定:
(2)
式中为最大惯性权重,一般取0.9,为最小惯性权重,一般取0.4。
2)学习因子模型
学习因子、表示粒子向个体最优值和全局最优值进化的随机加速权值。当、都等于0时,粒子会按照当前速度进行飞行,直到运动至边界处。当学习因子较小时,粒子将会在远离最优值区域内发生振荡现象;较大的学习因子则可以促使粒子快速向最优解区域内移动。所以本文中采用自适应模型,如下式所示:
(3)
式中为最大学习因子, 为最小学习因子,为最大迭代次数,t为当前迭代次数。
3)粒子位置更新方程的改进
基本PSO算法前期,精度较低,易发散。如果参数较大的话,在后期收敛速度会变慢,从而无法继续进行优化。在进化规划中,算法中若带有高斯变异和柯西变异算子时,算法都会取得较好的收敛效果,因此,本文中对个体最优解加入了高斯算子,每次找到一个个体最优值时,将在其周围利用高斯算子进行局部搜索。这样不仅可以提高算法前期的收敛精度,还可以改进算法后期的收敛速度,可以有效避免后期在最优解附近发生振荡。所以本文中的粒子位置通过下式来进行更新:
(4)
式中,是均值为0,方差为1的高斯变量,是个粒子中的最小适应函数值,即当前最优值,是尺度因子,通常取0.6。
4)早熟收敛的改进策略
PSO运行过程中,如果其中一个粒子发现一个当前最优位置,此时其他的粒子会快速向其聚集。如果该最优位置是个局部极值点,或者两个粒子均处于局部极值点,此时整个粒子种群将不可能在解空间内重新进行寻优,导致算法失去了搜索能力,陷入局部最优,这一现象就称为早熟收敛。本文对会与当前最优解重叠的粒子加入交叉操作过程,这样可以使该粒子状态重新更新,寻找新的搜索区域,从而跳出函数的局部极值点。首先给定一个阈值,如果其中一个粒子与当前最优粒子的位置距离小于之前设定的阈值,则对其进行交叉操作。具体的交叉公式如下:
(5)
式中 是粒子位置,为粒子速度,是介于[0,1]之间的一个随机数,为局部最优解。
3 仿真实验
1)粒子群算法性能比较仿真
为了验证改进粒子群算法的有效性,本文中选取标准的测试函数,分别利用基本粒子群算法和改进后的粒子群算法对函数进行优化,寻找适应度函数的最优解。
测试函数:Griewank函数
(6)
式(6)中的表示一个粒子,为粒子的每个分量,为每个粒子的维数【3】。
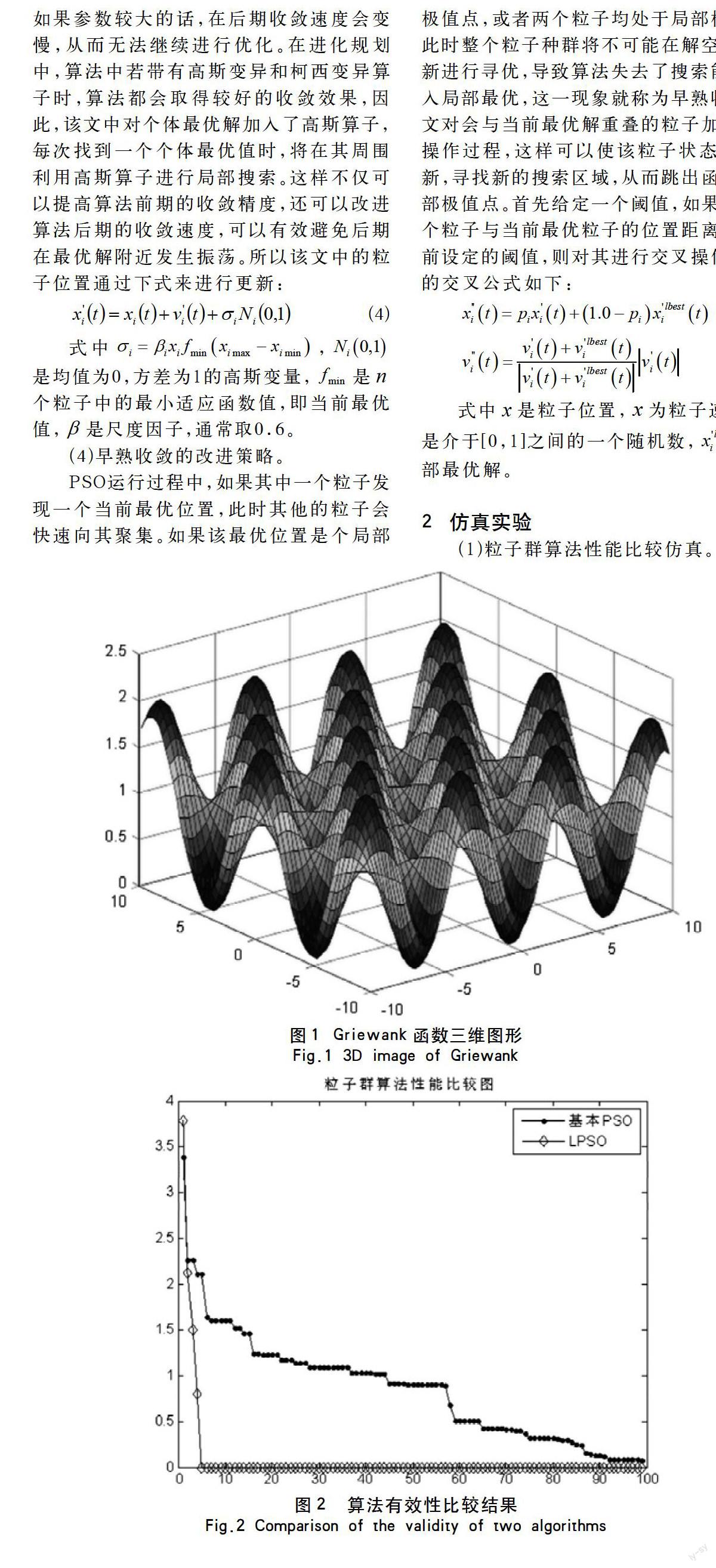
首先在 [-10,10] 的区间内均匀生成两组数,作为初始的粒子种群,数的个数为生成粒子的个数,每个粒子都是二维的,则该函数的三维图形如图1所示。由图可以看出:该函数存在多个局部极值点,但只存在唯一的全局最优点在(0,0)处。
图1 Griewank函数三维图形
Fig.1 3D image of Griewank
本文在进行仿真实验过程中的相关参数设置如下:学习因子,,粒子个数n=100,粒子维数D=10,粒子位置范围,最大迭代次数选取为100次,交叉操作过程中的阈值g取0.5,尺度因子取0.6。仿真结果如下,图中描述的是函数的最优适应值与迭代次数之间的关系。
图2 算法有效性比较结果
Fig.2 Comparison of the validity of two algorithms
由上述仿真结果可以看出,改进的粒子群算法(LPSO)较基本粒子群算法,不管是收敛精度还是循环迭代次数,都有所提高,验证了改进算法的有效性。
4 结论
本文在基本PSO的基础上,对参数的选择进行了调整,同时引入高斯算子及交叉操作过程。仿真结果证明,改进后的算法收敛效果较好。
参考文献
[1]. 张必兰. 改进的粒子群优化算法及应用研究[D].重庆大学,硕士学位论文, 2007.
[2]. 李丽,牛奔. 粒子群优化算法[M].北京:冶金工业出版社,2009.
[3]. 吴进华,吴华丽,周仕. 基于模拟退火的粒子群算法[J].仪器仪表学报,2008.
[4]. Yumao Li. Particle swarm optimization algorithm research and improvement [D]. Northwestern university master degree thesis,2009.
[5]. 任小波,杨忠秀. 一种动态扩散粒子群算法[D].宁夏工程学院,2010-01.
[6]. 刘逸. 粒子群优化算法的改进及应用研究[D]西安电子科技大学,博士学位论文, 2013.
猜你喜欢
计算机应用(2016年12期)2017-01-13
中国教育信息化·基础教育(2016年11期)2016-12-27
软件导刊(2016年11期)2016-12-22
科技视界(2016年26期)2016-12-17
科教导刊·电子版(2016年26期)2016-11-21
汽车科技(2016年5期)2016-11-14
中国新通信(2016年16期)2016-10-18
科教导刊·电子版(2016年21期)2016-08-23
电脑知识与技术(2016年15期)2016-07-04
电脑知识与技术(2016年13期)2016-06-29
