机载卫星通信伺服系统跟踪精度试飞方法
2015-07-09 05:19阮先丽
导航定位与授时 2015年4期
孟 超,阮先丽,肖 妮
(中国飞行试验研究院,西安 710089)
0 引言
卫星通信是现代通信的主要方式之一,它具有不受地理条件限制、频带宽、适合高质量的视频图像的实时传输等突出的优势,在军事应用中发挥举足轻重的作用。
为了实现宽频带多媒体的卫星通信,使用的频段是Ku频段,采用的天线是高增益天线,此种天线波束很窄,一般只有2°左右或更小。机载卫星通信设备属于“动中通”,跟地球站的“静中通”不同,载机在高速运动中,其位置、姿态、速度在不断迅速变化,引起其天线指向的角度迅速变化,而且其变化会大大超过天线的波束宽度,使天线增益大为下降,造成通信误码率增加,甚至通信中断。
伺服系统的任务是快速、准确、稳定、可靠地控制天线,使天线始终对准卫星,确保通信链路畅通。因此伺服系统的跟踪精度评估是机载卫星通信试飞的关键技术之一。
卫星通信系统在机载平台上的安装在我国处于起步阶段,其伺服系统的跟踪精度评估更是试飞中面临的全新问题。为了全面考核机载卫星通信伺服系统的跟踪精度,本文从卫星通信伺服系统的组成和原理出发,分析了影响伺服系统跟踪精度的主要因素,基于这些因素设计了试飞动作,并采用电平跌落法对跟踪精度进行了定量检测,达到了对机载卫星通信伺服系统跟踪精度进行试飞评估的目的。
1 组成及基本原理
机载卫星通信设备只是卫星通信系统的一个站点,一个基本的卫星通信系统至少包含两个卫通站点,通过卫星资源中继实现双向链路 (前向链路和返向链路)的互连互通。前向链路指从地面站发射信号经卫星转发到达机载站的信息传输链路,返向链路是指机载站发射信号经卫星转发至地面站的信息传输链路,如图1所示。

图1 卫星通信过程示意图Fig.1 Schematic diagram of satellite communication
机载卫星通信设备由以下几个分系统组成,即天馈分系统 (由天线座及天线馈源组成)、姿态测量分系统、跟踪接收机、伺服控制分系统及卫星通信信道设备,如图2所示。从图2中可以看出,当天线对准卫星时,天馈分系统和卫星通信信道设备 (包括收发信机、调制解调器及相应的终端设备)实现了卫星通信,但当载体运动时,天线必然偏离卫星,由跟踪接收机和伺服控制分系统控制天线转台转动,确保天线准确对准卫星,而姿态测量分系统则是用来测定由于载体运动引起天线转台的姿态角以及位置的变化,从而控制天线转台使天线始终保持对准卫星。
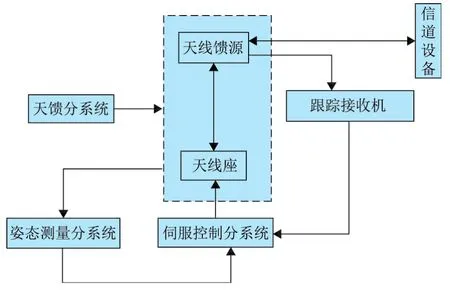
图2 机载卫星通信设备组成Fig.2 Composition of airborne satellite communication equipment
2 影响伺服系统跟踪精度的因素分析
2.1 天线安装误差及角度传感器误差
伺服系统跟踪误差由系统误差和随机误差组成,天线的安装误差会引起系统误差增大,从而导致伺服系统跟踪误差增大,最终可能导致天线无法正常对星,卫星通信中断。试飞中应关注天线安装的误差,应在试飞前对天线的安装角进行标校。
角度传感器用于测定天线的指向角度,由于其自身的误差,会影响卫星天线对星的准确性,该部分误差是伺服系统跟踪误差的随机分量。其误差大小由角度传感器的设备性能决定,是无法消除的。试飞中,通过地面静态测试的方法,对其精度进行测定,确保其在一定的误差范围内,具体指标由用户提出。
2.2 惯导不同组合状态引起指向误差
在卫星通信伺服跟踪系统中,惯导为其提供载机的实时位置 (经度、纬度及高度)和实时姿态 (方位、俯仰及横滚)等参数,用于解算天线座的转动角度,控制天线的指向。所以,惯导的精度及响应速度对整个天线系统指向精度的影响至关重要。而惯导在不同的组合状态以及纯惯性状态下的精度是存在较大差异的,因此,必须在不同的惯导状态下进行卫星通信功能的试飞。
试飞中,将惯导设置为不同状态,包括:全组合、INS+GPS、INS+多普勒和纯惯,地面通过记录信号载噪比、话音、数据和图像,验证在惯导不同组合状态下的卫星通信质量。试验结果见表1,不同惯导状态下的图像见图3~图6,可以看出,随着惯导精度的下降,天线指向精度下降,载噪比逐渐降低,话音和数据尚能正常通信,图像质量下降明显。
试飞结果表明,惯导的精度直接影响天线系统的指向精度,影响卫星通信的质量。
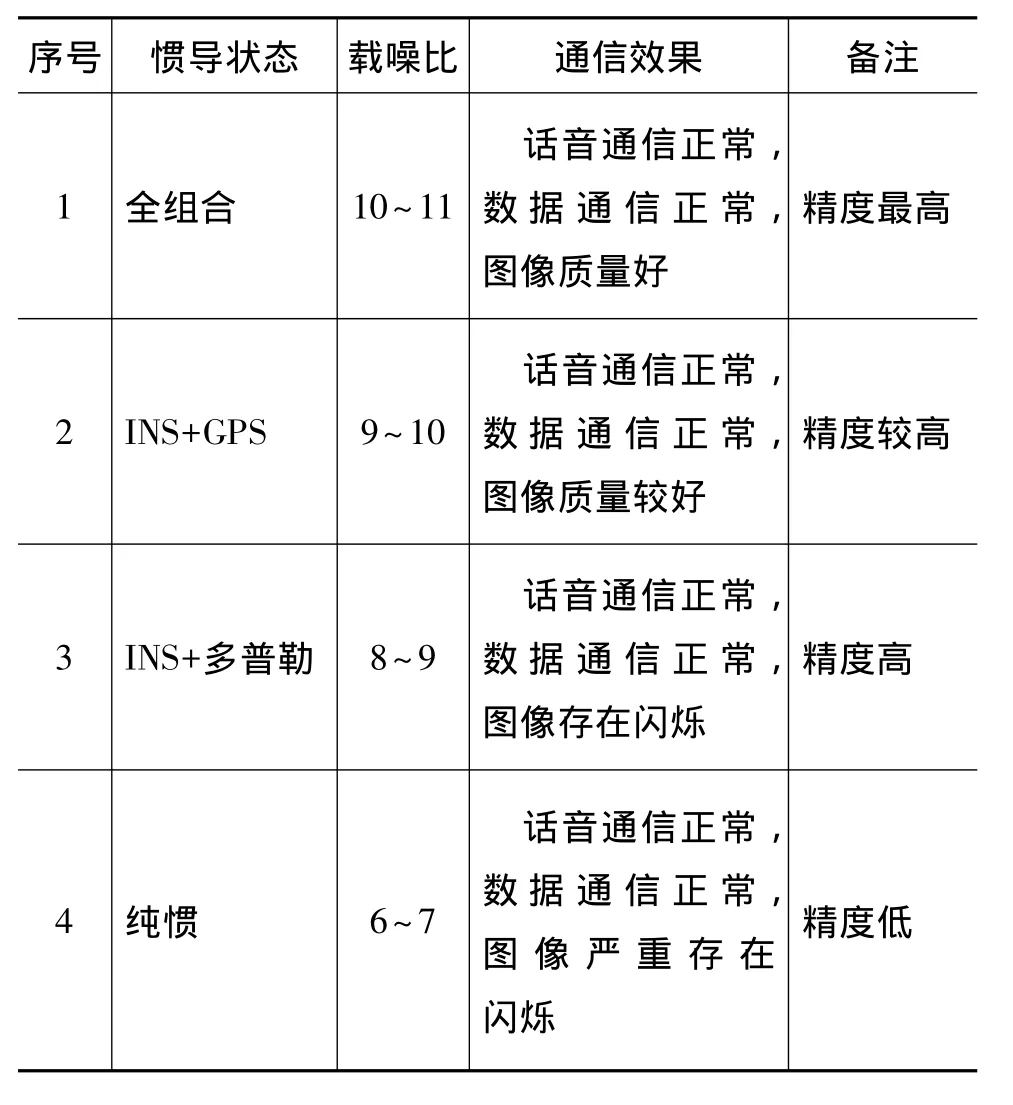
表1 惯导不同状态下卫星通信效果对比Tab.1 Satellite communication effects based on different Inertial navigation status

图3 惯导全组合状态时传输的图像Fig.3 Image of INS full composite state

图4 惯导GPS组合状态时传输的图像Fig.4 Image of INS+GPS state

图5 多普勒组合状态时传输的图像Fig.5 Image of INS+Doppler state

图6 纯惯20min后传输的图像Fig.6 Image of INS state after 20 minutes
2.3 载机运动引起的指向精度误差
载机运动和姿态也是引起指向精度误差的一个重要因素,载机的高速运动、大姿态机动都会引起天线的指向产生误差。试飞中,通过试飞动作的详细设计,达到充分验证的目的。
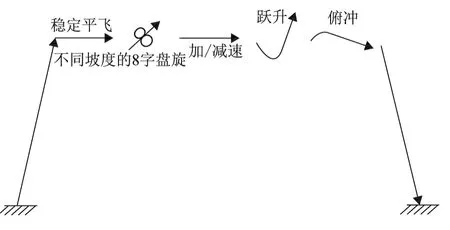
图7 飞行动作设计Fig.7 Flight movements design
试飞动作设计应包括以下要素:爬升、稳定平飞、直线加/减速飞行、不同坡度盘旋、跃升、俯冲、下降等,具体见图7。在平台的飞行包线范围内,检查最大速度、加/减速、最大横滚角、最大俯仰角、360°方位覆盖等条件下,卫星通信设备的语音、数据、图像等业务传输是否流畅、可靠,来表征指向误差是否满足使用要求。
3 伺服系统跟踪精度的定量检测方法
由于机载卫星通信设备天线系统处于不断地快速运动中,没有一个定量的、准确的测量方法,对卫星跟踪能力和跟踪精度的检测一直是一个问题。常规的检测方法是用眼睛观察传输图像质量的好坏 (是否出现“马赛克”)来判断。但这种方法的主观性太强,并且存在一定的局限。当接收机信号载噪比远大于门限电平时,图像质量变化不大,当载噪比低于门限电平时,图像消失,数据和话音对跟踪精度的变化不敏感,难以准确判断跟踪精度的好坏。
基于跟踪精度与天线增益的相关性,本文提出了采用电平跌落法对伺服系统的跟踪精度进行定量检测的方法。天线的增益与其偏离最大方向角度存在如式(1)的关系,因此,可以通过测量天线的增益来获得天线的跟踪精度。

式中,2θ0.5表示天线半功率波束宽度,Δθ表示天线跟踪误差角,G(θ0)为天线对准卫星时的增益值。
具体的测量方法如图8所示,在天线输入端加装信号电平采样记录装置,记录天线准确对准卫星所得到的最大信号电平 (电压)Umax,记录载机运动、天线进入自动跟踪状态接收到的信号电平Ui,计算归一化电平值Ei=Ui/Umax,天线的跟踪误差如式 (2)所示。

图8 信号场强采集记录装置示意图Fig.8 Schematic diagram of collecting and recording device

试验中常采用频谱分析仪作为信号电平指示装置,它的指示和输出均表示dBm。这时,上述精度计算公式需进行适当的调整。假定最大信号电平为Pmax,变化的信号电平为Pi,则信号电平跌落值ΔPi=Pi-Pmax,此时,天线跟踪精度的计算可表示为式 (3)

每50ms采样一次,分别在稳定平飞和大姿态飞行两种飞行剖面下进行,每种状态记录3组数据,每组记录5min,取其平均值作为天线的跟踪精度。

由于电平跌落的变化是一个随机变量,仅用平均值表示跟踪精度往往是不够的,需要统计出均方根值σ,计算其跟踪误差的均方根

某次试飞中,稳定平飞时的信号电平见图9,大姿态飞行时的信号电平见图10,稳定平飞时的跟踪精度要优于大姿态飞行时的跟踪精度。建议在使用电平跌落法对跟踪精度进行定量评估时,关注载机的运动状态,最好能给出载机在不同机动条件下的跟踪精度。

图9 稳定平飞的信号电平Fig.9 Signal of steady flight
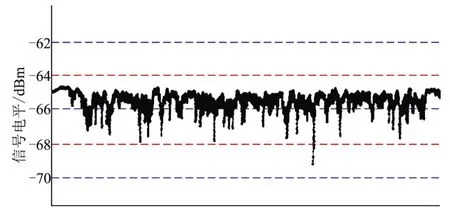
图10 大姿态飞行时的信号电平Fig.10 Signal of maneuvering flight
4 结束语
本文总结了实际型号试飞的经验,给出了天线安装误差、角度传感器误差、惯导不同组合状态误差、载机机动引起的误差等试飞中应关注的问题,并参考公安安全行业标准,提出了采用电平跌落法对伺服系统的跟踪精度进行定量检测。该试飞方法在试飞工程实践中得到了较好的应用,对后续卫星通信系统试飞具有很好的参考价值。
[1]吕海寰,蔡剑铭.卫星通信系统[M].北京:人民邮电出版社,2003.6.
[2]赵静,李效弟,罗志燕.电子支援设备测向精度试飞方法[J].飞行试验,2014,4:29-32.
[3]郭嘉俭.动中通卫星通信系统中的天线问题[J].数字通信世界,2011,10:66-71.
[4]GA/T528-2005,公安车载应急通信系统技术规范[S].北京:中国标准出版社,2005.4.
猜你喜欢
航天电子对抗(2022年4期)2022-10-24
建材发展导向(2022年18期)2022-09-22
北京航空航天大学学报(2022年6期)2022-07-02
舰船科学技术(2022年10期)2022-06-17
南京航空航天大学学报(2022年2期)2022-04-27
数字海洋与水下攻防(2020年5期)2021-01-04
北京航空航天大学学报(2018年1期)2018-04-20
北京航空航天大学学报(2016年4期)2016-02-27
火控雷达技术(2016年2期)2016-02-06
弹箭与制导学报(2015年1期)2015-03-11