基于双控制器切换的模糊PID励磁控制的仿真研究
2015-07-08 07:16:46宗超凡
电气传动自动化 2015年1期
宗超凡
(贵州大学电气工程学院,贵州贵阳550000)
基于双控制器切换的模糊PID励磁控制的仿真研究
宗超凡
(贵州大学电气工程学院,贵州贵阳550000)
摘要:针对电力系统的不断发展需求,传统PID控制的发电机励磁控制器存在动态和静态性能的不足,提出了模糊PID控制技术在励磁系统中的应用。经过比较发现,采用传统PID控制和模糊PID控制两者相互结合的双控制切换控制励磁系统更具优势。通过Matlab仿真,结果证明了双控制器切换控制励磁系统具有良好的控制性能。
关键词:传统PID;模糊PID;双控制器切换控制;励磁控制器;Matlab仿真
1 概述
同步发电机的励磁控制器,是同步发电机的重要组成部分,也是电力系统的重要组成部分。励磁控制器的控制效果直接反应到机端电压,从而影响电力系统的电压稳定。因此,研究同步发电机的励磁控制器的控制效果具有重要意义。
2 系统数学模型
同步发电机的数学模型具有多种模型,根据研究对象的不同,采取适当的数学模型,以突出研究对象的特点。忽略同步发电机内部动态特性,只对励磁系统的动态特性及控制策略进行研究,可以把同步发电机的励磁系统简化为一个一阶的单输入单输出系统(SISO)。如图1所示为同步发电机励磁系统图。
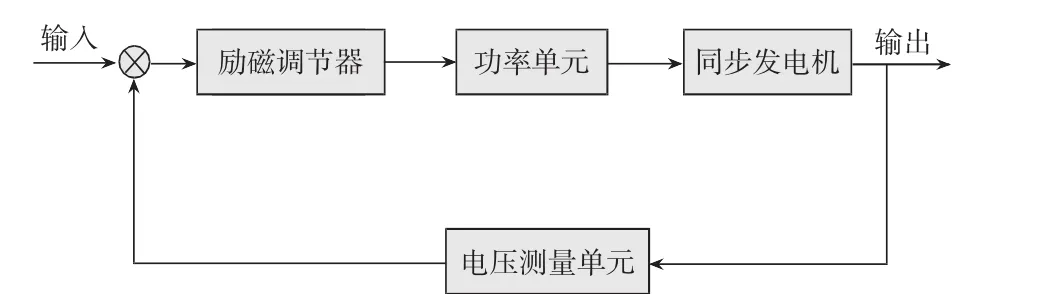
图1 同步发电机励磁系统图
2.1同步发电机的传递函数
同步发电机在运行时,三绕组在结构上完全对称,忽略励磁绕组的磁饱和线性和气隙的磁路的不良影响。因此,可以认为发电机的机端电压与励磁电压成一个正相关的关系,可以将同步发电机简化为一阶惯性环节,从而突出励磁动态特性和控制策略的研究。同步发电机的一阶惯性环节为:
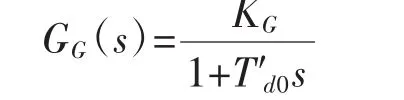
式中:KG为发电机的放大倍数,即发电机机端电压和励磁电压的比值;,为定子绕组开路时励磁绕组的时间常数。
2.2功率单元的传递函数
功率单元是由一组晶闸管电路构成的调压电路,交流电源通过整流电路时会产生换向电抗,换向电抗可阻止电流瞬时变化,因此,在触发控制信号和晶闸管输出之间存在滞后现象,功率单元的传递函数是一阶惯性环节:
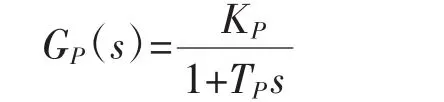
式中:Kp为输出功率的放大倍数;TP为功率单元的时间常数。
2.3电压测量单元的传递函数
电压测量单元是将发电机机端电压测量后反馈,与给定值进行比较,发电机机端电压值到数字控制器的输入,其中的整流滤波电路会产生一个滞后效应。因此,电压测量单元的传递函数为:
式中:KM为电压测量元件和发电机机端电压的比例系数;TM为测量回路的时间常数。
3 模糊PID励磁控制器设计
3.1模糊PID励磁控制器原理
模糊PID是将传统PID和智能控制中的模糊控制理论的优点相结合的一种更好的控制方式。其结构图如图2所示。
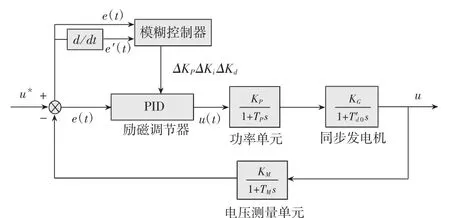
图2 模糊PID组成结构图
模糊控制器中有两个输入变量,一个是电压偏差e,另一个是电压偏差对时间的导数ec。选用这两个变量,e是为了表明机端电压和给定值的偏差;ec是为了表明目前电压偏差的变化率,这给模糊控制更加鲜明的条件判断,也更加符合模糊逻辑的思维。模糊控制器是由模糊化环节、知识库、推理决策和解模糊化环节构成。
模糊控制器经过解模糊化过程,向外输出变量dKp、dKi、dKd的参数给PID控制器,经PID控制器内部原有PID参数和dKp、dKi、dKd参数叠加后送给功率单元,功率单元经过PID参数给同步发电机提供相应的励磁电压。

3.2模糊PID控制逻辑
PID的参数Kp、Ki和Kd对系统的影响:Kp参数加快系统的动态响应速度;Ki参数消除系统的稳态误差;Kd参数预测误差变化趋势,提前修正。
(1)当(E<0,EC<0)时,这时励磁系统刚刚建立磁场,系统的动态响应要快,因此需要较大的Kp参数;当快接近给定值时,为减少超调,应减小积分作用,减小Ki参数。
(2)当(E>0, EC<0)时,系统输出值已超过给定值,向偏差增大的方向变化,在此时,控制作用应该尽力减小超调,应减小Kp参数,应减小积分作用,减小Ki参数。
(3)当(E>0, EC>0)时,系统出现大超调时,应保持Kd为较小值,使系统尽快稳定。误差开始减少,系统在控制作用下已呈现向给定值靠近的趋势,因此控制作用应逐渐减少,以免系统出现回调。
(4)而在系统进入稳定状态时,恢复调整初始时的PID参数。
3.3建立各个变量的论域以及隶属度函数
输入变量e的论域为[-1,1],ec论域为[-0.5,0.5],输出变量kp、ki、kd的论域为[-6,6]。各个输入输出变量的隶属度函数如图3-5所示,本文隶属度函数采用三角形模式。在Matlab命令窗口中输入fuzzy,调出模糊控制编辑器,在其内形成各个变量的隶属度函数和控制规则。
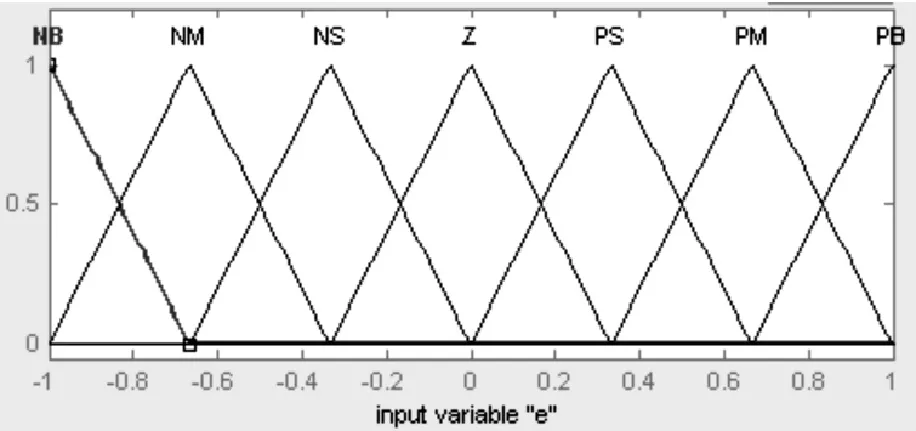
图3 输入变量e的隶属度函数图
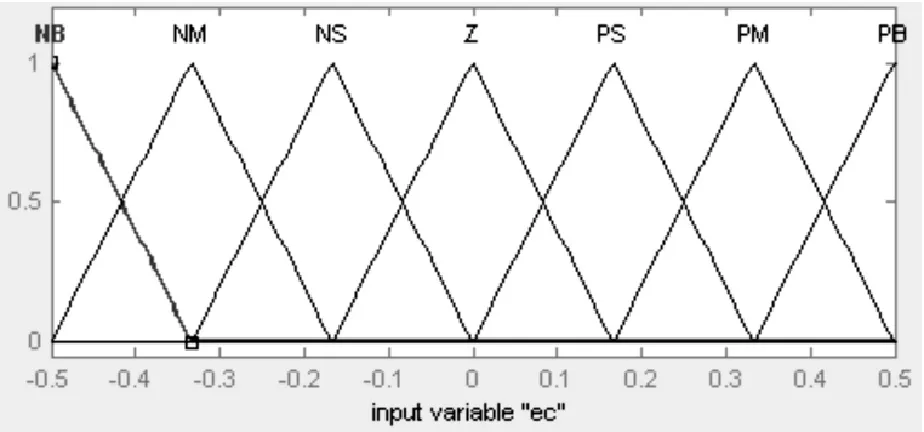
图4 输入变量ec的隶属度函数图
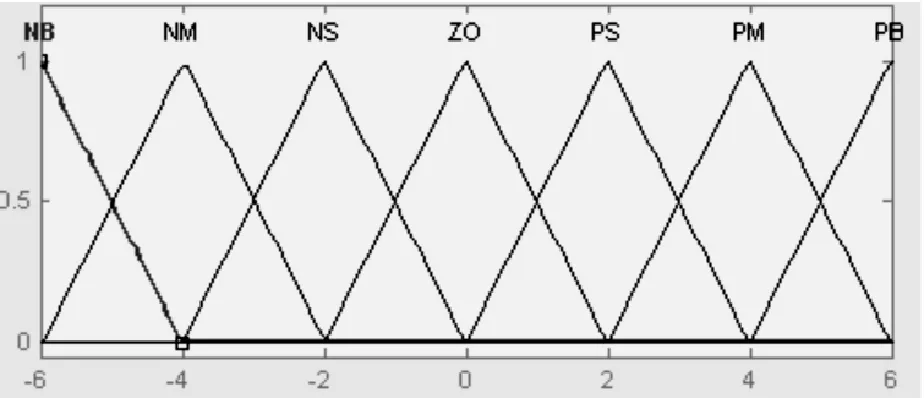
图5 输出变量kp、ki、kd的隶属度函数图
3.4建立模糊规则表
根据模糊PID控制逻辑建立模糊控制规则如表1所示。
将模糊控制规则在Matlab的fuzzy editor中用ifthen语句编写,选取解模糊方法采用重心法(centroid)。如图6所示为模糊规则编辑器。编辑好后,可以查看控制规则关系和控制变量空间关系图,如图7所示。
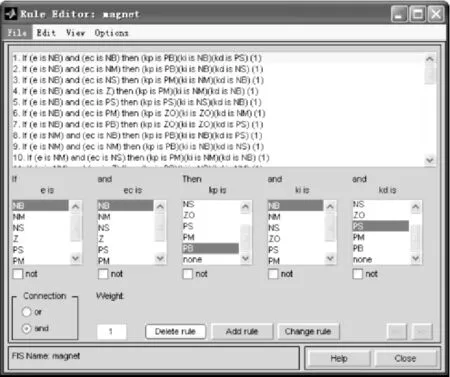
图6 模糊规则编辑器图
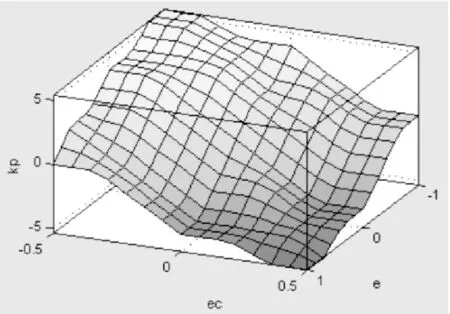
图7 kp与e和ec的空间关系图
4 PID、模糊PID以及切换控制的励磁控制器Matlab仿真
4.1励磁控制器Simulink模块搭建
在Simulink中构建三种励磁控制器的仿真模型,如图8所示。
其中,0s时给定阶跃信号值为1。根据试探法,所有控制器的PID参数均为Kp:100,Ki:3,Kd:15。同步发电机、功率单元和电压测量单元的传递函数参数如下。
同步发电机:KG=1,T′d0=6;
功率单元:KP=1,TP=0.3;
电压测量单元:KM=1,TM=0.02。
模糊模型多采用了一个模糊控制器模块,将模糊算法的文件fis导出到workspace中,以便模糊控制器能够读取。封装的PID的初始PID参数与传统PID参数相同,如图9所示。
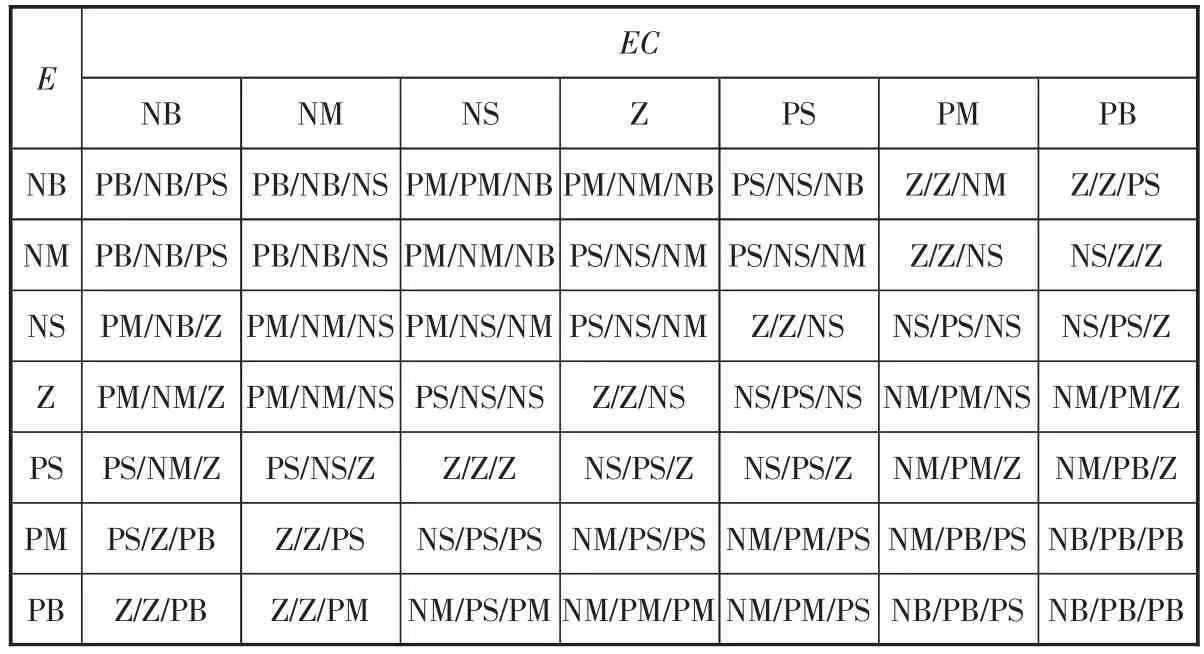
表1 模糊控制规则表
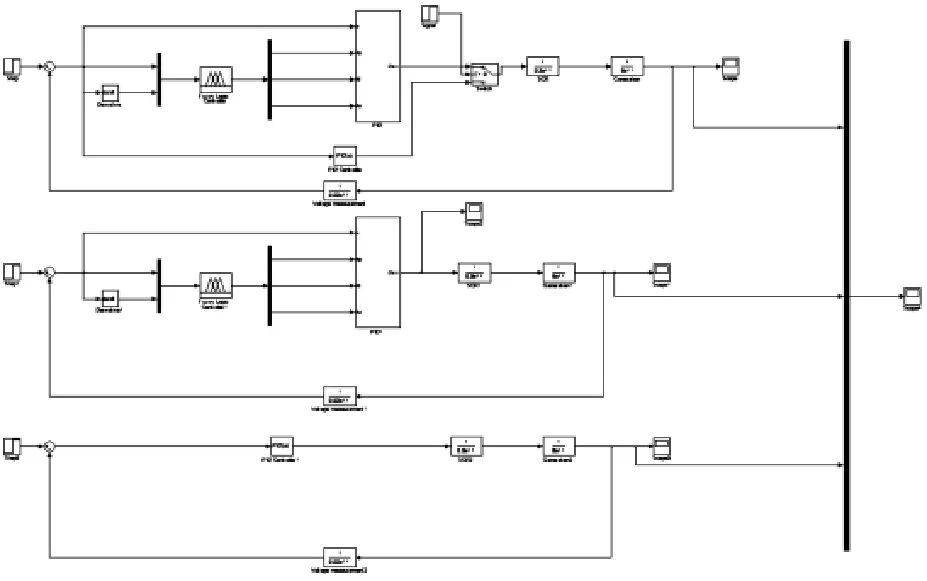
图8 三种励磁控制器的仿真模型
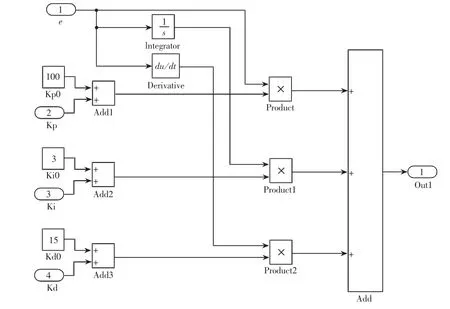
图9 封装PID的解封图
双控制器切换控制器是给开关一个控制信号,使开关在0-0.01s用传统PID控制,在0.01s后采用模糊PID控制励磁系统。
4.2仿真结果
将仿真参数配置设置为仿真时长为5s,仿真步长选为0de23tb。点击仿真按钮,如图10所示为仿真结果比较。
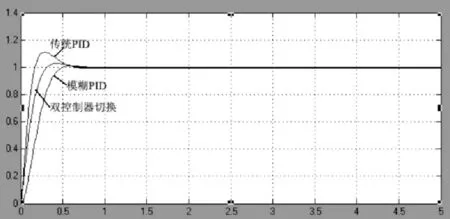
图10 双控制器切换控制、传统PID和模糊PID仿真结果比较
由图10可以看出,采用传统PID控制的励磁系统仿真曲线具有较大的超调量:11.1%,而采用模糊PID控制的励磁系统的仿真曲线能较平滑地进入控制目标值,其超调量为0.8%。传统PID具有较好的动态特性,其响应速度比模糊PID更快。传统PID控制的上升时间为0.17s,而模糊PID的上升时间为0.52s。
双控制器切换控制励磁系统的控制效果介于传统PID和模糊PID的控制效果之间。双控制器切换控制励磁系统相比较于模糊PID增加了动态响应速度,具有0.31s的上升时间。但是双控制器切换控制励磁系统比模糊PID控制的超调量大一些,具有2.8%的超调量。三者都具有较好的稳态精度。
跟踪在0.01s处控制器切换时的曲线情况,如图11所示。

图11 0.01s出控制器切换的仿真图
由图11可以看出,两个控制器切换是平滑切换,在0.01s出的左右导数的极限是相等的,因此认为是平滑切换。
5 结束语
本文将传统PID与模糊PID的优势相结合构成的双控制器切换控制的思路,具有更好的控制性能。
参考文献:
[1]金岫.基于模糊PID控制的同步发电机励磁控制系统仿真研究[J].继电器,2007,35(19):13-15.
[2]唐晓骏.同步发电机励磁控制系统的智能控制方法研究[D].天津:天津大学电气与自动化工程学院,2004.
[3]毕晔飞.电力系统励磁调节器控制研究[D].河北:燕山大学电气工程学院,2004.
[4]王德意,孙新志.同步发电机模糊PID励磁控制器仿真研究[J].水电自动化与大坝监测,2005,29(1):17-20.
[5]刘晓巍.模糊PID励磁控制器的仿真研究[J].电子技术,2006,1(17):160-162.
[6]杨永灯.基于遗传算法的同步发电机自调整模糊PID励磁控制器研究杨[J].大电机技术,2007,1(52):52-56.
[7]张立峰,金秀章,等.基于模糊自调整PID技术的励磁控制器研究[J].华北电力大学学报,2006,33(4):20-22.
[8]刘金琨.先进PID控制MATLAB仿真[M].北京:电子工业出版社,2006.
[9]张代峰.数字式励磁控制系统的研究与实现[D].长沙:湖南大学,2004.
中图分类号:TP273
文献标识码:A
文章编号:1005—7277(2015)01—0026—04
收稿日期:2014-06-24
Simulation and research of fuzzy-PID excitation control based on double controller switching
ZONG Chao-fan
(Electrical Engineering College,Guizhou University,Guizhou 550000,China)
Abstract:Aiming at the continuous development demands of power system,the generator excitation controller based on the traditional PID control exists some deficiencies of dynamic and static performance.The application of fuzzy PID control technology in the excitation system is presented.With the careful comparison of PID and fuzzy PID control,it is found that the double controller switch control excitation system combining with the traditional PID control and fuzzy PID control has more advantages.The Matlab simulation results show the perfect erformance of two-controller switching control of the excitation system.
Key words:traditional PID;fuzzy PID;double controller switching control;excitation controller;Matlab simulation
猜你喜欢
中国新通信(2017年3期)2017-03-11 09:33:02
现代情报(2016年11期)2016-12-21 23:33:46
科学与财富(2016年26期)2016-12-01 21:15:53
科技视界(2016年25期)2016-11-25 19:58:36
科技视界(2016年23期)2016-11-04 11:07:53
科技视界(2016年21期)2016-10-17 18:04:55
中国科技博览(2016年3期)2016-04-25 12:39:13
考试周刊(2016年11期)2016-03-17 05:33:40
科技视界(2016年5期)2016-02-22 20:10:30
现代电子技术(2015年11期)2015-07-28 12:55:19