两栖车辆水上快速性设计研究
2015-07-01 07:49郑翔玉房凌晖
兵器装备工程学报 2015年11期
郑翔玉,房凌晖,王 琛,吴 刚
(陆军军官学院,合肥 230031)
为了应对当前复杂的国内外形势,我国进行两栖作战的概率大幅度提高。两栖登陆作战阶段主要采用两栖车辆作为主战装备,因此对两栖车辆的战场生存能力有了更高的要求[1]。水上行驶的快速性是影响两栖车辆生存能力的重要因素,也就成为目前国内外两栖装备研究的热点领域[2-3]。
两栖车辆的突出优势在于:在水上和陆上行驶时都具有较高的机动性能、在水上行驶时不易被发现,同时能过快速通过水陆交界处。为了提高两栖车辆水上行驶的快速性,目前有很多种途径可以实现,本研究着重从减阻增速方面进行探讨和研究,为两栖车辆的设计和改进提供参考。
1 两栖车辆水上阻力分析
影响两栖车辆水上快速性的因素比较多,比如航行阻力、推进器效率和发动机输出功率等[4-10]。目前,提高两栖车辆机动性的研究主要集中在发动机技术上,通过提高发动机的功率来达到增速的目的。如果一味地增大发动机功率,就是使装甲装备的体积和质量不断增大,使武器系统的整体效能达到极限状态。根据试验测定,两栖车辆在水上以速度v 行驶时,功率P=f(v3),而阻力F=f(v2),因此本文通过减阻增速的途径来提高两栖车辆的水上快速性。
“减阻增速”技术是通过减小两栖车辆的航行阻力来提高其水上快速性。水上行驶速度是影响两栖车辆航行阻力的首要因素。航行阻力随航行速度的增加而快速增长。其次车型和附件。因为两栖车基于陆地行驶需要所具有的特定外形和行驶装置,极其严重地制约其水上航行速度的提高。两栖车辆为了兼顾水上和陆上行驶性能,致使与船舶的外形有较大的差异,不仅长度短、流线型差,而且突出部件较多,比如车轮、平衡肘和悬挂系统等行动装置。
参照船舶领域阻力分类方法和前人惯用的分类方法,两栖车辆在水中行驶的总阻力可以分为空气阻力、黏性阻力和兴波阻力3 大部分,其中黏性阻力包括形状阻力和摩擦阻力,根据统计资料表明:摩擦阻力所占比重很小,约占5% ~10%,形状阻力所占比重很大,约占80% ~70%,兴波阻力所占比重较大,约占15% ~20%。
因此“减阻”的主要任务是减小行动装置突出部位的阻力。对于轮式车辆来说,当车辆在水中行驶时,将车轮尽可能收起至水面以上,减小形体阻力; 当车辆驶入水陆交界处时,放下车轮,恢复车辆的陆地行驶功能。
2 两栖车辆车轮收放设计
设计车轮收放方案时应综合考虑车辆的陆上和水上行驶功能,尽可能减小对陆上行驶功能的影响,使车辆在水中能够平稳快捷地收起车轮,在陆上能够安全有效地行驶。
2.1 结构分析
两栖车辆车轮的收放是通过转动平衡肘来实现的。车轮收放方法有多种。从收放顺序上可以分为分阶段收放和平衡肘齐转同时收放。分阶段收放方案控制方案复杂,同时调平方案有利于车辆的整体稳定性、控制方便、结构简单。本设计选择了同时调平方案。如图1 所示,两栖车辆每侧的3 个平衡肘分别通过固定杆与杠杆联接在一起,这样只要通过电机带动一个平衡肘绕上轴转动,车辆一侧的平衡肘就能同时转动,实现车轮的收放。

图1 平衡肘连接示意图
平衡肘升降机构是以电机为动力源,通过平衡肘的旋转达到平衡肘的升降。在提升的过程中,不能影响到原有动力的传递,这样才可以实现在不中断动力的前提下,完成平衡肘的快速升降。动力输出时,由发动机经一级变速传递到变速箱,再经传动轴到平衡肘内,利用肘内动力传动,驱动车轮旋转。考虑到平衡肘上轴通过轴承座与车辆底盘固定,在设计该升降机构时,通过转动平衡肘上轴,就可以实现平衡肘的转动。平衡肘升降机构动力方式采用电机驱动,通过传动机构实现动力传动方式的转变,从而达到驱动升降机构,实现平衡肘升降的目的。平衡肘升降机构的分析示意图如图2所示。

图2 收放车轮机构的分析示意图
2.2 传动方式选择
由于电机的动力以旋转运动的方式输出,而平衡肘的升降也是通过旋转平衡肘来实现的。因此在设计中,通过中间加一传动机构就可实现动力的平稳传递。利用电机驱动来实现平衡肘转动的传动方式有很多种,如滚珠丝杠方式和蜗轮蜗杆方式等。在两栖车辆的设计中,要求升降机构完成动作后能够自锁。蜗轮蜗杆的传动方式具有传动比大、工作较平稳、噪声低、结构紧凑、可以自锁等优点,因此平衡肘升降的动力传递就采用蜗轮蜗杆机构。
2.3 收放机构设计
利用三维设计软件,完成平衡肘升降机构的设计。蜗轮与蜗轮结合盘固定成一体,平衡肘上轴与蜗轮结合盘采用花键连接,蜗轮的转动可以带动平衡肘的旋转,如图3 所示。
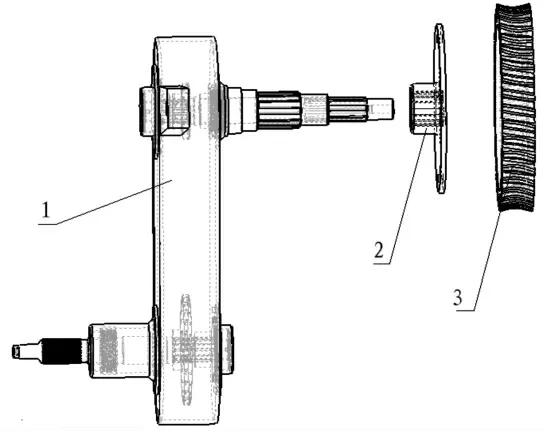
图3 平衡肘与蜗轮的装配示意图
对蜗轮蜗杆以及连接固定装置进行结构设计,选取合适的轴承,并组成装配体。图4 为蜗轮蜗杆装配后形成的装配结构示意图。

图4 蜗轮蜗杆机构结构示意图
平衡肘升降机构由电机、涡轮涡杆减速器、涡轮涡杆旋转装置组成,特点是:
1)动力传动在平衡肘内部进行,保证在车轮收放时不切断动力的传递。在水上航行时,可将车轮抬高到水面之上,减小车轮产生的水上阻力;
2)陆地行驶时,可在一定范围内实现车体距地高调整,提高车辆的越障能力;
3)车轮在任何高度位置具有可靠的机械自锁功能。
3 航行阻力数值模拟分析
采用数值模拟的方法对两栖车辆在车轮放下和车轮收起两种情况下的航行阻力进行计算,可以定量地分析车轮收起后的减阻效果。
3.1 计算网格的划分
为了便于仿真模型的计算,首先要对流场区域划分网格。为了提高计算速度,整个流场应当尽可能减少网格的数量,因此网格划分采用了非结构网格与结构网格(六面体)相混合的方案,内部为非结构网格,外部为结构网格。两栖车辆在航行过程中,车体周围水域的形状复杂,会出现兴波等现象,为了能较好地模拟出水面波面的形状,提高计算的准确度,应当在车体附近采用加密网格,远离车体的流域网格可以适当的稀疏。整个流场区域的网格划分如图5 所示。

图5 网格划分
3.2 模型选择和参数的确定
控制方程采用有限体积法离散,对流项使用二阶迎风格式离散,扩散项和源项使用中心差分格式离散; 离散后的方程组采用Gauss-Seidel 法结合代数多重网格法迭代计算;流体采用不可压缩流体,压力速度耦合采用SIMPLEC 法处理,两相问题采用流体体积函数法处理。
FLUENT 提供了分离式(segregated solver)和耦合式(coupled solver)两类求解器。coupled solver 由于在计算中耦合了流动能量方程,因此收敛速度很快,但是coupled solver所需内存大约是segregated solver 的1.5 到2 倍。考虑到现有的机器配置,也考虑到VOF 模型只能用segregated solver。
对于控制条件的设定(operation conditions),由于本文模拟的是有自由液面的情况,所以必须设定重力加速度,这样才能看到自由液面的变化。对于参考压力位置的设定是比较重要的,它设定的好坏影响到收敛速度,一般设定在边界处,本文选择的是控制域的上边界的中心处。在两栖车辆运动的过程中,由于速度较小,车体周围空气的密度变化很小,可近似为一常数,设定空气的密度是1.225 kg/m3。
对于边界条件的设定,由于在GAMBIT 中已经标记出具有不同边界条件类型的边界和区域,在FLUENT 中分别给予设置即可。
3.3 计算结果分析
针对两栖车辆在车轮放下和车轮收起两种不同车体结构下的航行阻力进行仿真,计算水上行驶速度节点分别为:1.8 km/h、3.6 km/h、5.4 km/h、7.2 km/h、9.0 km/h、10.8 km/h。
3.3.1 速度矢量分布及分析
两栖车辆以9.0 km/h 的速度航行时,车轮放下和车轮收起两种状态下的两栖车辆绕流场的速度分布差异较大。两栖车辆的吃水深用h 表示,距离水面h/2 处取一横剖面,剖面上的速度分布如图6 所示。

图6 剖面处的流场速度
图6表明,车辆处于车轮放下和车轮收起两种行驶状态下,在车轮周围的流场都产生了不规则的涡流,而车轮放下时车体周围的流场流动更加复杂。车体周围的涡流是由于负压的存在,使车体的尾部有较大尺度的涡流出现。而涡流的存在使该区域的压力骤降。在压差的作用下,便产生压差阻力。
车轮放下时,车轮对车体周围流场的影响更加明显,使车体周围出现很多不规则的涡流,流场更加复杂。车轮收起后,车轮对附近流域的影响降低,车体附近的涡流减少。
3.3.2 行驶阻力与航速的关系分析
车辆在车轮放下和车轮收起两种状态下,通过仿真,行驶阻力随航速的变化规律如图7 所示。

图7 水上行驶总阻力
图7表明,两栖车辆不管处于车辆放下还是车轮收起状态,行驶阻力都是随着速度的增加而增大。同时表明,车轮收起后,两栖车辆的行驶阻力较车辆放下有所减小,且随着速度的增加减阻效果更加明显。分析表明:车轮收起是两栖车辆“减阻增速”行之有效的方法。
4 结论
快速性是衡量两栖车辆战场生存能力的重要指标。为了减小两栖车辆的水上行驶阻力,本文对两栖车辆的车轮收放进行了设计研究,并通过数值模拟的方法对减阻效果进行分析,从研究结果可得出如下结论:
1)设计时采用数值模拟的方法代替部分实物试验,可以节省大量的人力、物力和财力;
2)对于过渡型车体,两栖车辆的水上行驶阻力随着速度的增加而增大;
3)车轮收放是两栖车辆“减阻增速”的有效方法。车轮收放的设计研究是对两栖车辆减阻技术的一项有益探索。
[1]盛振邦,刘应中.船舶原理[M].上海:上海交通大学出版社,2003.
[2]刘儒勋,王志峰.数值模拟方法和运动界面追踪[M].合肥:中国科学技术大学出版社,2001.
[3]李殿璞.船舶运动与建模[M].哈尔滨:哈尔滨工程大学出版社,1999.
[4]李万平.计算流体力学[M].武汉:华中科技大学出版社,2004.
[5]胡键.影响喷水推进器水动力性能的若干因素[J].哈尔滨工程大学学报,2008,29(1):11-15.
[6]居乃鵕.两栖车辆水动力学分析与仿真[M].北京:兵器工业出版社,2005.
[7]郑翔玉,余旭华.两栖车辆水上加速性能数值模拟研究[J].计算机仿真,2012,29(11):71-74.
[8]郑翔玉,贾小平.小型高速两栖车水上行驶阻力数值模拟[J].舰船科学技术,2008,30(3):139-144.
[9]杨楚泉.水陆两栖车辆原理与设计[M].北京:国防工业出版社,2003.
[10]袁涛,刘法明,刘云帼.集团军侦察装备生存能力分析[J].兵工自动化,2006,25(7):19-20.
猜你喜欢
城市轨道交通研究(2022年2期)2022-11-18
汽车实用技术(2022年19期)2022-10-19
科学与信息化(2021年23期)2021-09-16
汽车工程师(2021年7期)2021-08-05
汽车工艺师(2021年7期)2021-07-30
舰船科学技术(2016年1期)2016-02-27
专用汽车(2016年12期)2016-02-11
汽车实用技术(2015年8期)2015-12-26
速读·下旬(2015年12期)2015-10-21
专用汽车(2015年8期)2015-03-01