
基于光学基准法提高倾斜船台上惯性平台水平测量精度
2015-06-15 19:19贾立民杨盛林张世先
中国惯性技术学报 2015年6期
徐 凯,贾立民,张 群,张 波,李 莉,杨盛林,张世先
(1. 天津航海仪器研究所,天津 300131;2. 丹青科技公司,北京 100028)
基于光学基准法提高倾斜船台上惯性平台水平测量精度
徐 凯1,贾立民1,张 群1,张 波1,李 莉2,杨盛林1,张世先1
(1. 天津航海仪器研究所,天津 300131;2. 丹青科技公司,北京 100028)
惯性平台安装在舰船的过程中需要将惯性平台坐标系与舰船坐标系进行对准,也就是对惯性平台进行标校。当舰船在倾斜船台上进行建造时,由船台的倾斜角度造成水平测量仪器的测量误差对标校的结果有很大影响,尤其是在测量舰船横摇角时,会由于测量仪器的摆放带来误差。为了提高倾斜船台上惯性平台的水平测量精度,在电子水平仪上设置光学基准,并通过高精度自准直经纬仪(TM5100A)对放置在基准平板及惯性平台上的电子水平仪进行方位对齐,保证其测量方位的一致性。实测结果表明:电子水平仪方位的对齐误差为 2″,电子水平仪测量误差小于 0.1″(计算值),从而提高了惯性平台水平测量精度。
倾斜船台;水平测量误差;方位对齐;惯性平台
本刊于2013年第6期曾发表《倾斜船台对惯性平台水平测量的影响》,文中对由于测量仪器的摆放带来的误差进行了分析归纳。本文将对此种误差提出对应的解决方法,从而提高惯性平台水平测量精度。
1 倾斜船台对惯性平台水平测量的影响
1.1 倾斜船台及其引起水平测量误差的原因
倾斜船台也称纵向倾斜船台,是目前广泛采取的船台型式。船台的表面与水平成一倾角,成为船台坡度,这个坡度常用倾角的正切值即tanα表示,一般在1/18(约3.2°)~1/25(约2.29°)之间。船厂最多采用的坡度是1/20(约2.86°),这个坡度方便于船台定位中的测量和计算。船舶建成后,在滑道上依靠自身的质量即可滑行下水。适合于重力下水是纵向倾斜船台的最大优点。
在倾斜船台上,惯性平台的水平测量会由于倾斜船台的倾斜角度产生测量误差。测量误差主要是由于水平测试仪器在测量载体水平基准与设备水平基准面时,测试仪器在摆放方位上的偏差引起的,即两次测量不能严格的保证平行。
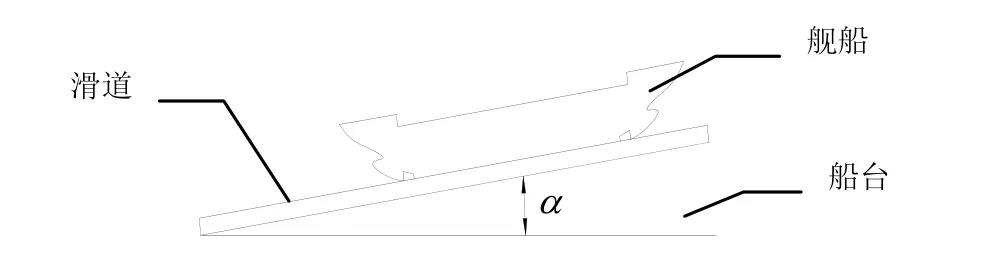
图1 倾斜船台Fig.1 Inclined ship-building berth
1.2 对惯性平台水平测量的影响
1.2.1 同一测量面的重复放置测量误差
对同一测量面进行水平测量时,重复测量会出现的误差如图2,如边长100 mm的水平仪产生0.1°的测量方位误差角,一端产生0.17 mm位移。在没有精确定位基准的情况下,采取靠目视瞄准基准平台的刻线或与设备水平基准面的边缘对齐进行放置水平仪时将很容易产生这样的误差。当在船台纵摇角为3°,舰船横摇角为5′的状态下,产生0.1°的测量方位误差角时,测量横摇角将引起18.8″的测量误差,这对于高精度的水平测量将无法允许。
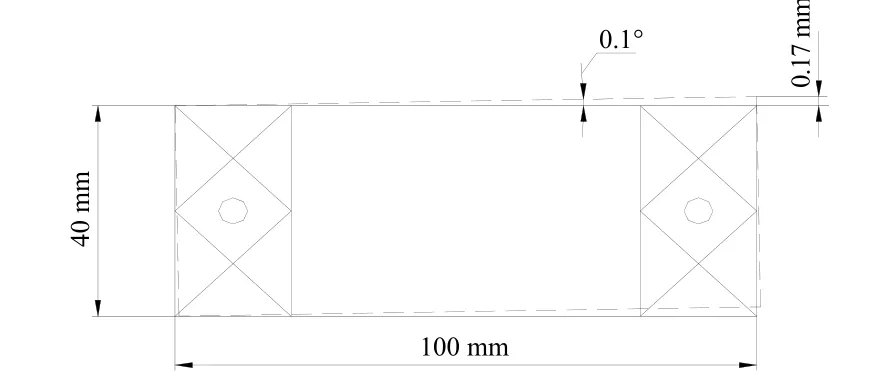
图2 测量误差Fig.2 Measurement errors
1.2.2 不同测量面的放置测量误差
对不同测量面(如惯性平台和水平基准之间)进行水平测量时,基本是靠目视瞄准基准平台刻线或与零件的边缘对齐来放置水平仪。但是,当测量基准平台与测量设备无法在方位上保持一致时,在 3°的倾斜船台上测量舰船横摇角时,将产生很大的测量误差。如果边长100 mm的水平仪在不同测量面时产生的0.87 mm放置误差,即产生0.5°的测量方位误差角,在测量横摇角时就会产生 94.2″的测量误差。所以,在 3°的倾斜船台上,同一设备的基准面测量时,由于重复放置的位置误差将引起较大的测量误差;另外,在惯性平台水平基准与载体主基准之间进行测量时,由于测量方位角无法保持一致将产生无法估算的测量误差。
表1给出了各种水平姿态下水平测量误差。

表1 水平测量误差对比Tab.1 Contrast on level measurement errors
2 提高倾斜船台上水平测量精度的方法
2.1 机械方法
机械方法就是在各个测量基准上设置机械定位基准(定位销或定位面),且各定位基准之间要先调整至平行。但是,此种方法会改变现有基准的结构形式,且在水平调整的时候,要时刻监测各基准之间的平行,操作复杂。因此,采用这种方法需在总体设计阶段提出设置机械定位基准的要求,不建议在定型设备上使用。
2.2 光学方法
光学方法就是在电子水平仪上设置光学基准,使其光学基准与电子水平仪的水平测量轴线平行,并保持固定。通过架设多台自准直经纬仪可以实现电子水平仪在不同水平基准上水平测量轴线的平行。
2.2.1 带光学基准的电子水平仪
带光学基准的电子水平仪如图3所示。
光学六面体与支架的基准边1靠紧,并通过胶粘的方式固定在支架上,支架放置在电子水平仪上,通过紧顶螺钉使支架的基准边2与电子水平仪基座靠紧。
由于支架上的基准边1与基准边2通过加工保证其平行,且电子水平仪的传感器固定于基座上并平行。因此,光学六面体上用于观测的四个反射面与电子水平仪的传感器的测量方位平行或垂直。
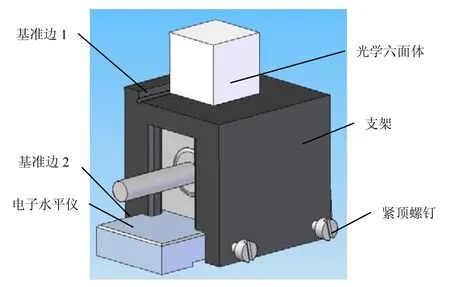
图3 带光学基准的电子水平仪Fig.3 Electronic level with optical benchmark
由于不同水平基准之间的水平测量是相对测量,即调整惯性平台的水平基准与载体水平基准对齐,因此,只要光学六面体的方位法线与电子水平仪的传感器的测量方位固定并保持平行或垂直即可。
2.2.2 实施过程
实施过程如图4所示。
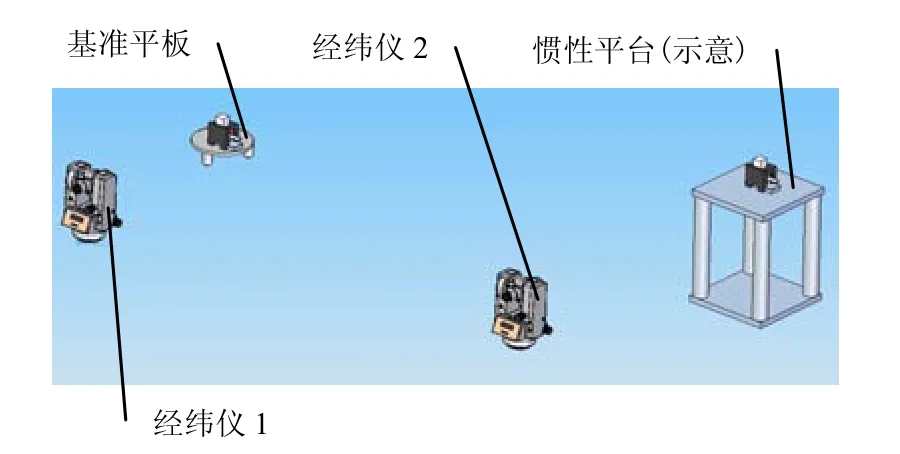
图4 实施过程Fig.4 Measurement process
实施过程如下:
a) 将带光学基准的电子水平仪放置在基准平板上与基准平板的艏艉经纬线对齐(以便再次放置时经纬仪进行对准),记下基准平板的纵倾角读数;
b) 架设经纬仪1并照准光学六面体,并记下初始方位读数;
c) 在惯性平台附近架设经纬仪 2,使两台经纬仪互瞄,并将经纬仪2的光轴旋转至与经纬仪1的初始方位平行;
d) 在惯性平台水平基准上放置带光学基准的电子水平仪,调整电子水平仪方位,被经纬仪2照准;
e) 调整惯性平台水平姿态使其与基准平板对齐;
f) 横倾角的调整同纵倾角;
g) 复测纵倾角,直至纵倾角与横倾角均满足要求。
2.2.3 误差分析
水平测量误差的主要原因是电子水平仪测量方位角无法保持一致。本方法通过高精度自准直经纬仪(TM5100A)进行电子水平仪测量方位的对齐,从而保证了水平测量精度。
电子水平仪测量方位的对齐误差由以下几方面组成:
u1:经纬仪1照准放置在基准平板的电子水平仪上的光学基准的照准误差,为1″;
u2:经纬仪1与经纬仪2互瞄的照准误差,为1″;
u3:经纬仪2与经纬仪1互瞄的照准误差,为1″;
u4:经纬仪2照准放置在惯性平台水平基准的电子水平仪上的光学基准的照准误差,为1″。
电子水平仪测量方位的对齐误差U为

根据式(1),可得U=2″。
当电子水平仪测量方位的对齐误差为2″时,根据文献[1]中的公式(5)(6)计算得,电子水平仪产生测量误差小于0.1″。
3 结 论
此方法的使用解决了惯性平台无法再在倾斜船台进行高精度水平调整的难题,应用光学的方法提高了水平测量精度。但是,由于操作过程较繁琐,使用仪器较多,不建议作为常规标校方法使用。
(References):
[1] 徐凯, 李琳, 孙洋. 倾斜船台对惯性平台水平测量的影响[J]. 中国惯性技术学报, 2013, 21(6): 845-848. Xu Kai, Li Lin, Sun Yang. Influence of inclined shipbuilding berth on horizontal measurement of inertial platform[J]. Journal of Chinese Inertial Technology, 2013, 21(6): 845-848.
[2] 徐凯, 马林, 张群. 某型惯性平台安装标校方法[J].中国惯性技术学报, 2008, 16(3): 287-290. Xu Kai, Ma Lin, Zhang Qun. Calibration method of an inertial platform[J]. Journal of Chinese Inertial Technology, 2008, 16(3): 287-290.
[3] 张磊, 李辉, 韩涛, 等. 舰船武器系统姿态基准坞内标校新方法[J]. 中国惯性技术学报, 2013, 21(2): 275-280. Zhang Lei, Li Hui, Han Tao, et al. New method of dock calibration for naval vessel weapon system attitude reference[J]. Journal of Chinese Inertial Technology, 2013, 21(2): 275-280.
[4] 孟士超, 刘伟, 徐凯. 惯性平台姿态在高精度摇摆台上的标校方法[J]. 中国惯性技术学报, 2009, 17(2): 250-252. Meng Shi-chao, Liu Wei, Xu Kai. Calibration method of inertial platform fixed on high precision turntable[J]. Journal of Chinese Inertial Technology, 2009, 17(2): 250-252.
[5] 胡佩达, 高钟毓, 张嵘. 基于三轴摇摆台的高精度姿态试验系统[J]. 中国惯性技术学报, 2013, 21(2): 271-274. Hu Pei-da, Gao Zhong-yu, Zhang Rong. High accuracy attitude testing system based on three-axis test table[J]. Journal of Chinese Inertial Technology, 2013, 21(2): 271-274.
[6] Zhang Lei, Wang An-guo. Vessel surface equipment attitude measurement based on conventional inertial reference system[J]. Advanced Material Research, 2012, 629: 878-883.
[7] Johnson G, Waid J, Primm M, et al. Ship attitude accuracy trade study for aircraft approach and landing operations[C]//IEEE Position Location and Navigation Symposium. 2012: 783-790.
[8] Gu Dong-qing, El-Sheimy N, Hassan T, et al. Coarse alignment for marine SINS using gravity in the inertial frame as a reference[C]//IEEE Position, Location and Navigation Symposium. 2008: 961-965.
[9] Shockley J, Zetterstrom S. 50 years of the central inertial and GPS test facility[J]. American Institute of Aeronautics and Astronautics, 2009: 1-32.
[10] Wang An-guo, Li Hui, Wang Yan, et al. A principle of astronomical three-dimensional position fixing based on single baseline radio interferometry[J]. Chinese Journal of Electronics, 2011, 20(1): 183-186.
[11] Yu Q, Jiang G, Fu S, et al. Fold-ray videometrics method for the deformation measurement of nonintervisible large structures[J]. Applied Optics, 2009, 48(24): 4683-4687.
Improving level measurement precision of inertial platform on inclined ship-berth based on optical benchmark
XU Kai1, JIA Li-min1, ZHANG Qun1, ZHANG Bo1, LI Li2, YANG Sheng-lin1, ZHANG Shi-xian1
(1. Tianjin Navigation Instruments Research Institute, Tianjin 300131, China; 2. Dantsin Technology Limited Company, Beijing 100028, China)
Inertial platform coordinate system needs to be aligned with ship coordinate system during installing an inertial platform into a ship, and this can be realized by calibrating the inertial platform. When a ship is built on an inclined berth, the measurement error of leveling instrument due to the tilt angle of ship-building berth has great influence on the calibration results. In particular, the improper placement of the leveling instrument would become an error source in the measurement of ship’s roll. To solve this problem, an optical benchmark is set on the electronic level gauges, then a high-precision auto-collimation theodolite, i.e. TM5100A, is used to implement azimuth alignments for these gauges on benchmark platform and inertial platform to ensure the consistency of the azimuth measurements. Experimental results indicate that the azimuth alignment error is 2″, and the measurement error of level measurement is less than 0.1″, showing that the level measurement precision of inertial platform is improved.
inclined ship-building berth; level measurement error; azimuth alignment; inertial platform; optical benchmark
U666.1
:A
2015-09-08;
:2015-11-28
国防科技预研重点项目(51309010101)
徐凯(1973—),男,高级工程师,主要研究方向惯性平台结构设计。E-mail: xk_707@sina.com
1005-6734(2015)06-0837-03
10.13695/j.cnki.12-1222/o3.2015.06.024
猜你喜欢
宇航计测技术(2022年2期)2022-06-01
中学生数理化·八年级物理人教版(2022年3期)2022-03-16
红领巾·萌芽(2022年3期)2022-03-13
中学生数理化·八年级物理人教版(2021年12期)2021-12-31
中学生数理化·八年级物理人教版(2021年3期)2021-07-22
百科探秘·航空航天(2016年9期)2016-12-01
探测与控制学报(2015年4期)2015-12-15
火炮发射与控制学报(2015年2期)2015-11-27
中学生数理化·八年级物理人教版(2014年1期)2015-01-09
雷达学报(2014年4期)2014-04-23
