
Indoor pedestrian navigation based on double-IMU framework
2015-06-15 19:19XUYuanCHENXiyuanLIQinghuaTANGJian
中国惯性技术学报 2015年6期
XU Yuan, CHEN Xi-yuan, LI Qing-hua, TANG Jian
(1. School of Electrical Engineering, University of Jinan, Jinan 250022, China; 2. School of Instrument Science and Engineering, Southeast University, Nanjing 210096, China; 3. Key Laboratory of Micro-Inertial Instrument and Advanced Navigation Technology Ministry of Education, China, Nanjing 210096, China)
Indoor pedestrian navigation based on double-IMU framework
XU Yuan1, CHEN Xi-yuan2,3, LI Qing-hua2,3, TANG Jian2,3
(1. School of Electrical Engineering, University of Jinan, Jinan 250022, China; 2. School of Instrument Science and Engineering, Southeast University, Nanjing 210096, China; 3. Key Laboratory of Micro-Inertial Instrument and Advanced Navigation Technology Ministry of Education, China, Nanjing 210096, China)
In order to realize low-cost indoor pedestrian navigation, a framework with two inertial measurement units (IMU) is proposed. In this framework, one IMU is fixed on the foot, and the other one is fixed on the shoulder. When pedestrian is at rest in the process of walking, the velocity error and angular velocity error from observation are used by Kalman filter to estimate the calculation error of foot-mounted IMU. Meanwhile, the yaw error observation is fulfilled by achieving the difference between the yaw measured from shoulder-mounted IMU and the one measured from foot-mounted IMU. In this architecture, the two-IMU framework is arranged in closed loop mode. Experimental results show that the proposed method can provide navigation information of pedestrians, and the position’s mean error is reduced by about 14.93% compared with that by the methods in open loop mode.
indoor pedestrian navigation; inertial navigation system; Kalman filter; foot-mounted IMU.
Nowadays, the Pedestrian Navigation (PN) in Global Positioning Systems (GPS) denied areas has received grate attention over the past few decades[1-2], especially in indoor environment. Although there are many beacon-based solutions have been investigated (Such as ultrasound, radio or vision)[3-5], the beacon-free solutions are preferable since they do not depend on a pre-installed infrastructure[6], and there are many attempts have been proposed. For example, Zhang J L et al. proposed shoe-mounted personal navigation system using MEMS inertial technology[7], Ali A et al. give the MEMS-based PN for GPS-denied areas in [8]. As one of the most widely used framework of PN, the foot-mounted Inertial Measurement Unit (IMU)-based framework (proposed by Foxlin E in [9]) employs Zero-velocity update (ZUPT) to reduce the drift error. In order to provide morerestrictions for IMU, there are many attempts have been proposed. For instance, Feng W et al. and Xie B et al. employ building layout for the yaw drift reduction[10-11], however, it requires that we should know the geographical features in advance. Jiménez A R et al. employ Zero Angular Rate Update (ZARU) Heuristic Heading Reduction (HDR) on the basis of ZUPT in [6], however, the foot-mounted magnetic sensors is poor in yaw calculation for PN due to its strong vibration during normal walking.
In this work, a two low-cost IMU-based framework for indoor pedestrian navigation is proposed. In this mode, one IMU is fixed on the foot, and the other one is fixed on the shoulder. When the person is in a stance phase, the Kalman filter (KF) is working with the observation value of velocity error and angular velocity error, meanwhile, the proposed framework is able to provide the yaw error with the shoulder-mounted IMU. Moreover, the proposed method employs closed loop-based framework. The remainder of the paper is organized as follows: Section 2 gives the principle of the two low-cost IMU-based indoor pedestrian navigation. The tests and discussion are illustrated in Section 3. Finally, the conclusions are given.
1. Principle of the two low-cost IMU-based indoor pedestrian navigation
1.1 Two low-cost IMU-based framework
The two IMU-based indoor pedestrian navigation framework is shown in Fig.1. In this work, two low cost IMU is used, one is fixed on the foot (called foot-mounted IMU), and the other is fixed on the shoulder (called shoulder-mounted IMU). The foot-mounted IMU is used to provide the position, velocity, and the attitude information, and the shoulder -mounted IMU is used to provide the yaw. In this mode, the accelerometer and gyroscope data are use to detect the phase of the person, when the person is in a stance phase, the Kalman filter (KF) is working. Since the velocity and the angular velocity should be zero when the person is in a stance phase, the velocity and the attitude calculated by the foot-mounted IMU is input to KF as the observation value of velocity error and angular velocity error. Moreover, the yaw measured from the shoulder-mounted IMU should be the same as the yaw measured from the foot-mounted IMU, thus, the difference between yaw measured from the foot-mounted IMU and that measured from the shoulder-mounted IMU is used as the observation value of yaw error. The KF is used for INS error estimation. Then, the INS solution is corrected by the error estimation. The coordinate frames used in this work is also shown in Fig.1, including the body frame (so called b-frame) and the navigation frame (so called n-frame).
1.2 Two low-cost IMU-based framework
The KF employs 15-element vector contains the errors in attitude, velocity, and position, the biases for accelerometer and gyroscope in n-frame. The state equation can be obtained as in Eq. (1),

is the acceleration in east, north, and downward respectively, Tis sampling period, ωkis the Gaussian white noise with zero mean, and its covariance matrix is Qk. The measurement equation for KF is shown in Eq. (2),



Fig.1 Two-IMU-based indoor pedestrian navigation framework
2 Tests and discussion
2.1 Indoor test environment
The test platform used in this work consists of two 9 DOF IMU. One is fixed on shone, and the other one is fixed on the shoulder. The IMU employs ADXL203, ADXRS620, and HMC5983 as accelerometer, gyroscope, and magnetometer respectively. Meanwhile, an encoder and an IMU are used to provide the reference trajectory. Here, the IMU (consists of MPU6050 and HMC5883) is used to provide the yaw, and encode is used for walking velocity measurement of the person. In this work, the data refresh rate of the computer is 50 Hz. The prototype of the test platform is shown in Fig.2.
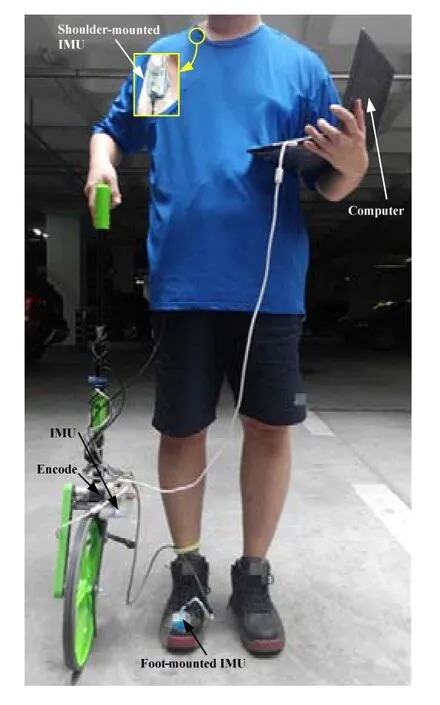
Fig.2 Prototype of the test platform
2.2 Performance in real indoor environments
In this section, the performance for the proposed navigation method will be discussed. In this work, the person walks along the reference path (show in Fig.3) from start point to end point, the path length is about 78m. The yaw measured from foot-mounted IMU and that value measured from shoulder-mounted IMU are shown in Fig. 3. It can be seen that from the figure, the yaw measured from foot-mounted IMU has strong vibration compared with that from shoulder-mounted IMU.
The closed loop method is used in this work, thus, we compare the performance between the open loop method and the proposed method. The trajectories of two strategies are shown in Fig.4. It can be seen that both the strategies are able to provide the trajectory of the person, and the proposed method is closer to the reference path. Fig.5 and Fig.6 show the east and the north position errors of two strategies. And Tab. 1 shows the comparison of two strategies in terms of position error, from thetable we can see the proposed method is more effective to reduce the position drift. The root-mean-square error (RMSE) of east position is 2.0852 m, and the RMSE of north position is 0.8236 m. Comparing with the open loop method, the proposed method reduces the mean RMSE of position by about 14.93%.

Fig.3 Yaw measured from foot-mounted IMU and shoulder-mounted IMU

Fig.4 Trajectories of the real test

Fig.5 East position error of two strategies

Fig.6 North position error of two strategies

Tab.1 Comparison on two strategies in terms of position errors
3 Conclusions
In this work, a two low-cost IMU-based framework for indoor pedestrian navigation is proposed. In this mode, one IMU is fixed on the foot, and the other one is fixed on the shoulder. When the person is in a stance phase, the KF is working, and the observation value of velocity error and angular velocity error are input to the KF, meanwhile, the proposed framework is able to provide the yaw error with the shoulder-mounted IMU. Moreover, the proposed method employs closed loop-based framework. The experimental results show that the proposed method is effective to reduce the mean error of the position by about 14.93% compared with the open loop-based method.
[1] Ojeda L, Borenstein J. Non-GPS navigation for security personnel and first responders[J]. Journal of Navigation, 2007, 60(3): 391-407.
[2] Zhang Z, Meng X. Use of an inertial/magnetic sensor module for pedestrian tracking during normal walking[J]. IEEE Transactions on Instrumentation and Measurement, 2015, 64(3): 776-783.
[3] Nguyen V H, Pyun J Y. Location detection and tracking of moving targets by a 2D IR-UWB radar system[J]. Sensors, 2015, 15(3): 6740-62.
[4] Xu Y, Chen X Y, Li Q H. Autonomous integrated navigation for indoor robots utilizing on-line iterated extended Rauch-Tung-Striebel smoothing[J]. Sensors, 2013, 13(12): 15937-15953.
[5] Girard G, Cooté S, Zlatanova S, et al. Indoor pedestrian navigation using foot-mounted IMU and portable ultrasound range sensors[J]. Sensors, 2011, 11(8): 7606-7624.
[6] Jiménez A R, Seco F, Prieto J C, et al. Indoor pedestrian navigation using an INS/EKF framework for yaw drift reduction and a foot-mounted IMU[J]. Institute of Electrical & Electronics Engineers, 2010: 135 - 143.
[7] 张金亮, 秦永元, 梅春波. 基于 MEMS惯性技术的鞋式个人导航系统[J]. 中国惯性技术学报, 2011, 19(3): 253-256. Zhang J L, Qin Y Y, Mei C B. Shoe-mounted personal navigation system based on MEMS inertial technology[J]. Journal of Chinese Inertial Technology, 2011, 19(3): 253-256.
[8] Ali A, El-Sheimy N. Low-cost MEMS-based pedestrian navigation technique for GPS-denied areas[J]. Journal of Sensors, 2013(2013): 1-10.
[9] Foxlin E. Pedestrian tracking with shoe-mounted inertial sensors[J]. IEEE Computer Graphics and Applications, 2005, 25(6): 38-46.
[10] Feng W, Zhao H, Zhao Q, et al. Integration of GPS and low cost INS for pedestrian navigation aided by building layout[J]. Chinese Journal of Aeronautics, 2013, 26(5): 1283-1289.
[11] 谢波, 江一夫, 严恭敏, 等. 个人导航融合建筑平面信息的粒子滤波方法[J]. 中国惯性技术学报, 2013, 21(1), 1-6. Xie B, Jiang Y F, Yan G M, et al. Novel particle filter approach for fusing building plane into pedestrian navigation[J]. Journal of Chinese Inertial Technology, 2013, 21(1): 1-6.
为了实现低成本的室内行人导航,提出了一种双惯性测量单元(IMU)框架。在这种模式下,一个IMU固定于足部,另一个IMU固定于肩部。当行人在行走过程中处于静止状态时,卡尔曼滤波器利用测量得到的速度和角速度误差对足部IMU的解算误差进行预估,与此同时,通过对足部IMU和肩部IMU测量得到的航向角做差完成对航向角误差的观测。在此基础上,双IMU框架结构采用了闭环模式。实验结果显示,采用该方法能够提供行人导航信息,平均位置误差与采用开环模式的方法相比降低了14.93%左右。
室内行人导航;惯性导航系统;卡尔曼滤波;足部惯性测量单元
TN967.3
A
2015-07-12;
:2015-09-18
国家自然科学基金资助项目(50975049,41204025,51375087);山东省自然科学基金项目(ZR2014FP010);济南大学博士基金项目(XBS1503)
徐元(1985—),男,讲师,博士,从事组合导航研究。E-mail: xy_abric@126.com
1005-6734(2015)06-0714-04
10.13695/j.cnki.12-1222/o3.2015.06.003
一种基于双IMU框架的室内个人导航方法
徐 元1,陈熙源2,3,李庆华2,3,唐 建2,3
(1. 济南大学 自动化与电气工程学院,济南 250022;2. 东南大学 仪器科学与工程学院,南京 210096;3. 东南大学 微惯性仪表与先进导航技术教育部重点实验室,南京 210096)
猜你喜欢
中国机械工程(2022年22期)2022-11-25
中国机械工程(2022年7期)2022-04-20
东南大学学报(医学版)(2022年1期)2022-03-17
东南大学学报(医学版)(2021年6期)2022-01-27
渤海大学学报(自然科学版)(2021年3期)2021-12-27
东南大学学报(医学版)(2021年5期)2021-11-06
东南大学学报(医学版)(2021年4期)2021-11-05
校园英语·上旬(2020年2期)2020-05-11
中国机械工程(2019年17期)2019-09-19
校园英语·中旬(2019年5期)2019-07-16
