基于电驱动技术的全方位移动平台
2015-06-15 19:11:36颜南明张豫南王双双
装甲兵工程学院学报 2015年3期
颜南明, 张豫南, 王双双, 张 健
(装甲兵工程学院控制工程系,北京 100072)
基于电驱动技术的全方位移动平台
颜南明, 张豫南, 王双双, 张 健
(装甲兵工程学院控制工程系,北京 100072)
基于4轮独立电驱动技术、网络控制技术和全方位轮技术,研究了一种在不改变自身姿态情况下实现全方位移动功能的运动平台,并着重阐述了全方位轮的结构、布局及其驱动控制技术。试验与应用结果表明:平台灵活的机动性能可解决狭小空间内的物资搬运以及快速、准确定位与对接问题。
全方位轮;电驱动;全方位移动平台
全方位移动指的是沿任意方向平动、任意半径转向以及二者之复合的运动模式。目前实现全方位移动主要有2种方式:1)通过机械设计,使传统的驱动轮具有足够的旋转角(大于90°)来实现全方位移动;2)通过对驱动轮进行特殊设计(设计成全方位轮),结合相应的独立驱动控制方法来实现全方位移动。方式1)多采用机械传动方式,为了获得大于90°的驱动轮摆角和原地转向功能,其机械设计复杂,成本高,因此在实际应用中并不多见;方式2)多采用电传动方式,结合驱动轮的特殊设计及相应的驱动控制策略,其扩展性强,因此应用领域越来越广泛。考虑到开发和应用成本以及技术发展趋势,目前的全方位移动平台多采用方式2),本文称之为电传动全方位移动平台,该平台的关键技术包括2个方面:一是驱动轮的设计,与普通的驱动轮不同,用于全方位移动技术的驱动轮结构比传统的驱动轮复杂得多,本文称之为全方位轮;二是驱动控制技术,要实现全方位移动,各全方位轮的驱动必须是独立驱动,通过对各个全方位轮旋转速度和方向的协调控制来实现平台的全方位移动。20世纪80年代至90年代初,美国海军、陆军就将这种电传动全方位移动技术应用于航空母舰、军舰上物资和弹药的运输及装卸[1],但关于全方位轮设计以及全方位移动平台控制技术方面的研究,目前还未见到相关报道。国内全方位移动技术的应用较少,主要用于小机器人移动控制,平台质量均较轻[2-3],而全方位移动技术在物资搬运等领域的应用还未见到相关报道。基于此,本文设计了1 t级基于4×4独立电驱动的全方位移动平台方案,并在平台原型的基础上验证了控制算法。
1 总体方案
全方位移动平台主要组成结构如图1所示,包括综合控制器、CAN总线系统、4个驱动电机及电机驱动器、减速器、全方位轮、动力电池组、各种传感器、操纵杆以及遥控系统等。该平台除了有人驾驶模式外,还可以通过遥控终端进行操控。工作时,由综合控制器接收来自操控者的指令信息;然后,通过CAN总线向4个电机驱动器发送速度指令,每个电机驱动器控制电机形成特定的旋转方向和速度;最后,通过减速器传递到每个全方位轮上。由于全方位轮在地面上形成的驱动力大小和方向与全方位轮的旋转速度大小和方向相关,因此通过控制4个全方位轮的速度大小和方向就可以控制整个平台总的驱动力大小和方向,从而实现全方位移动。

图1 全方位移动平台主要组成结构
2 全方位轮结构及布局
全方位轮是实现平台全方位移动的核心部件之一,因此要实现全方位移动,首先要设计全方位轮。全方位轮从基本结构上划分,主要包括麦克纳姆轮、双排全方位轮、单排全方位轮、连续切换轮、正交轮和球轮等[4-5]。全方位轮结构的选择不仅要考虑全方位轮的布局、承重能力、控制方式,还要考虑全方位轮制作成本和应用的可拓展性,笔者选择麦克纳姆轮结构作为全方位轮的结构,如图2(a)所示。
从图2(a)可以看出:麦克纳姆轮结构由一组自由旋转的辊轮和轮毂组成,考虑到各向运动的平衡性[6],辊子一般以45°角均匀安装在轮毂的周围。这种结构特点使轮子不仅可以沿着垂直于轮轴的方向运动,而且可以在轮轴的±45°范围内朝任意方向运动,如果平台的轴距和轮距相等,则可以实现平台横向和纵向相同的运动特性。设计这种全方位轮的关键在于:根据轮子的承重选择轮子的材料,确定轮子外圆半径、辊轮个数、辊轮长度、辊轮中间直径以及辊轮小端直径,以保证全方位轮的外圆侧面投影精确成圆[7-9]。
在实际设计和应用全方位移动平台时,还必须确定全方位轮的个数与实现全方位移动功能的关系。要实现稳定的全方位移动功能,一般而言,全方位轮数量≥3,应用中常见的是3轮和4轮平台。除了全方位轮数量上的区别,在轮子的布局上也有2种不同的方式,即向心式布局(如图2(b)所示)和纵向对称式布局(如图1所示),不同布局方式对应的控制方法也不同[10]。3轮平台中轮子的布局采用向心式布局;4轮平台因支撑稳定可靠、驱动力均衡,在实际应用中采用较多。因此,笔者采用4轮纵向对称式布局作为全方位移动平台的行走机构。

图2 麦克纳姆轮结构和向心式布局
3 全方位移动平台控制技术
要实现全方位移动功能,除了全方位轮以外,还需要配套的控制系统。通过分析全方位轮结构和运动特性,可知每个全方位轮具有3个运动自由度[6]:一是绕轮子轴线转动;二是沿辊子轴线垂线方向平动;三是绕轮子和地面的接触点转动。每个辊子也具有3个自由度:一是绕辊子轴线转动;二是绕轮子轴线转动;三是绕轮子和地面的接触点转动。当全方位轮以图1所示的方式固定在平台车体上时,每个全方位轮旋转时都会产生一个与车体纵向轴线成45°的牵引力,力的方向与全方位轮的旋转方向相关,力的大小和全方位轮的旋转速度大小有关。在控制系统的作用下,通过控制不同全方位轮的旋转速度大小和方向,就可以控制4个全方位轮产生的合力大小和方向,从而推动平台车体朝合力的方向运动,实现全方位移动。本文采用的全方位移动平台控制系统结构如图3所示。

图3 全方位移动平台控制系统结构
该控制系统结构分为上、下2层:上层为综合控制,由综合控制器对驾驶员指令信号进行采集、分解和计算;下层为单个全方位轮的电机驱动系统,电机输出轴通过减速器与全方位轮的轮毂相连,由电机控制器接收上层综合控制器发过来的电机转速和旋转方向指令,控制电机按指令要求运行。上层综合控制器的指令传到下层电机驱动系统通过CAN总线实现。
通过对全方位移动平台的动力学、运动学分析,上层综合控制器根据驾驶员操控指令按照式(1)所示的控制策略进行运算和分配平台4个驱动电机的转速和旋转方向。

(1)
式中:vx、vy、ωz分别为全方位移动平台横向速度、纵向速度和自身旋转角速度;R、l、w分别为全方位轮半径、全方位移动平台的轮距和轴距;ω1、ω2、ω3、ω4分别为全方位移动平台右前轮、左前轮、左后轮、右后轮的旋转角速度。
要实现全方位移动平台沿某一方向以一定的速度运动,因vx、vy、ωz为已知量,则控制系统只要控制4个全方位轮以ω1、ω2、ω3、ω4的角速度进行旋转即可,这里旋转速度包括方向。要实现全方位轮控制,也就是驱动电机速度大小和方向的控制,就需要对电机进行速度闭环控制,全方位移动平台采用异步电机为驱动电机,其控制结构和控制策略如图4所示。

图4 驱动电机控制结构和控制策略

φs=∫(Δω*+ωr)dt。
式中:Tr=Lr/Rr,为转子电路的时间常数。
4 试验与应用
根据以上方案设计,笔者课题组研制了全方位移动平台样机,如图5所示,该平台及驱动电机参数如表1所示。

图5 全方位移动平台样机
利用该样机对平台的全方位移动功能进行试验验证,试验时路面环境为坚硬平坦的沥青路面,利用运动控制软件完成对平台期望运动的设置,通过对陀螺仪(ADIS16355)的数据滤波得到样机的姿态角速度,通过对加速度计(ADIS16355)的数据滤波并积分得到样机的横、纵向速度,将试验结果经无线串口通信模块(FC-211AP)发送至PC机并进行保存。

表1 全方位移动平台及驱动电机参数
图6、7分别为平台横向运动期望速度vx=0.1sin(πt/10)和纵向运动期望速度vy=0.1sin(πt/10)与实际速度的试验对比曲线,每项试验做3组,对各组试验数据进行均值处理后得到平台的速度数据。图8为平台中心转向试验时的平台角速度变化曲线,期望角速度为ωz=2°/s。由以上试验结果可以看出:所研制的平台能够很好地实现预期的全方位移动功能。
通过对平台的拓展设计,该种全方位移动平台技术得到了很好的实际应用,图9为部分实际应用产品,分别为全方位移动叉车和升高机。

图6 平台横向运动期望速度与实际速度试验对比曲线

图7 平台纵向运动期望速度与实际速度试验对比曲线
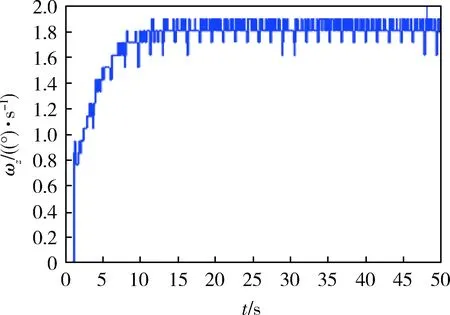
图8 平台中心转向试验时的平台角速度变化曲线

图9 全方位移动平台实际应用产品
5 结论
本文研究成果在全方位移动平台技术领域打破了国内仅限于小机器人的研究现状,达到了国外相关领域的技术水平。通过拓展研究,形成了一系列的应用平台,不仅可以满足陆军船艇和通用装备保障搬运的要求,也可应用于军舰、洞库等狭窄空间的物资和弹药的运输、装卸上;在物资运输、搬运、航天、挂装、定位、无人地面车辆、侦察和维修等平台上,也同样具有重要的意义。
本文研究的全方位移动平台是基于轮式载体,这对地面条件和全方位轮的设计提出了较高的要求,由于全方位轮自身的结构特点,导致轮式全方位移动平台高速运行时会产生振动,影响平台的平稳性。下一步将进行履带式全方位移动平台研究,以弥补这些不足,并将大大提升平台的越野性能。
[1] McGowen H. Navy Omni-Directional Vehicle (ODV) Development: Where the Rubber Meets the Deck [J]. Naval Engineers Journal, 2000, 112(4): 217-228.
[2] 夏国庆. Mecanum轮全向移动机器人研制[D].南京: 东南大学,2010.
[3] 石维亮,王兴松,贾茜. 基于Mecanum轮的全向移动机器人的研制[J].机械工程师, 2007(9):18-21.
[4] Campion G, Bastin G, D’Andrea-Novel B. Structural Properties and Classification of Kinematic and Dynamic Models of Wheeled Mobile Robots [J]. IEEE Transactions on Robotics and Automation,1996, 12(1):47-62.
[5] 王双双. 全方位移动平台运动仿真与控制研究[D].北京:装甲兵工程学院, 2012.
[6] 赵冬斌,易建强,邓旭玥. 全方位移动机器人结构和运动分析[J]. 机器人, 2003, 25(5):394-398.
[7] 贾巨民,刘宝波,许爱芬,等. 螺旋式滚轮设计原理[J]. 机械科学与技术, 2001, 20(1):17-19.
[8] 吕伟文. 全方位轮移动机构的结构设计[J]. 机械与电子, 2006(12):63-65.
[9] 王一治, 常德功. Mecanum轮全方位运动系统的约束条件及奇异位形[J]. 上海大学学报:自然科学版, 2009, 15(2):181-185.
[10] 冷春涛, 曹其新. 四轮全方位移动机器人各向相异性研究[J].智能系统学报, 2007, 2(3):45-51.
(责任编辑:尚彩娟)
An Omni-directional Mobile Platform Based on Electric Drive Technology
YAN Nan-ming, ZHANG Yu-nan, WANG Shuang-shuang, ZHANG Jian
(Department of Control Engineering, Academy of Armored Force Engineering, Beijing 100072, China)
Based on four-wheel independent electric drive technology, network control technology and omni-directional wheel technology, a mobile platform which can realize omni-directional mobile function without changing its attitude is designed, and the construction, layout and drive control technology of omni-drerection wheel are also expounded. Experiment and application results show that the omni-directional mobile function of the platform can solve the problems of material handling in limited space, and fast, accurate positioning and docking.
omni-directional wheel; electric drive; omni-directional mobile platform
1672-1497(2015)03-0081-04
2015-01-28
军队科研计划项目
颜南明(1975-),男,讲师,博士。
TJ81+0.323
A
10.3969/j.issn.1672-1497.2015.03.016
猜你喜欢
汽车实用技术(2022年7期)2022-04-20 11:45:04
汽车实用技术(2022年5期)2022-04-02 09:36:40
汽车实用技术(2022年5期)2022-04-02 09:36:20
小学科学(学生版)(2021年7期)2021-07-28 06:44:34
装备制造技术(2020年9期)2021-01-26 00:15:08
房地产导刊(2020年11期)2020-12-28 01:32:30
中国新技术新产品(2020年4期)2020-05-05 15:49:48
幼儿园(2020年22期)2020-03-29 02:17:54
中学语文(2019年31期)2019-12-05 04:54:10
铁道通信信号(2019年4期)2019-10-10 03:42:56