
基于LabVIEW的单片式晶片自动化电镀设备通信系统
2015-06-12 01:58明志发桂志刚王博文
机械制造 2015年3期
□ 明志发 □ 郭 帅 □ 桂志刚 □ 王博文
1.上海市智能制造及机器人重点实验室 上海 200072
2.上海新阳半导体材料有限公司 上海 200073
随着科学技术的突飞猛进,半导体制造技术面临日新月异的变化。半导体晶片电镀,就是在硅晶片、砷化镓晶片等衬底的金属层上进行金属的电化学沉积。与微电子制造中其它电子电镀相比,半导体晶片电镀在种类、功能、精度、质量以及电镀方法上均有所不同,技术要求非常高,随着半导体行业的快速发展,对晶片电镀设备的要求越来越高。另外,晶片电镀设备涉及的硬件模块非常多,自动化程度要求高,控制系统应具备较高的安全性和稳定性。由于整个控制系统比较复杂,本系统使用LabVIEW软件为每个工序设计了独立的控制模块,每个模块都可以实现单独作业,极大地提高了设备的稳定性和可维护性。LabVIEW是由美国NI公司开发的,它作为当今最完善、影响力最大的一种图形化编程语言,拥有丰富的工具包,极大地提高了编程者的效率[1-4]。LabVIEW现行的串口通信方式主要有2种:RS232和RS485。LabVIEW现行的网络通信方式有4种:①使用TCP、UDP等传输协议编程;②使用DataSocket技术进行网络通信;③现场实时发布测控程序的网页,异地采用浏览器进行监控;④采用无需协议的远程桌面控制。这些通信方式能使计算机之间和本地不同VI之间的通信得以轻松实现[5]。
1 设备的组成
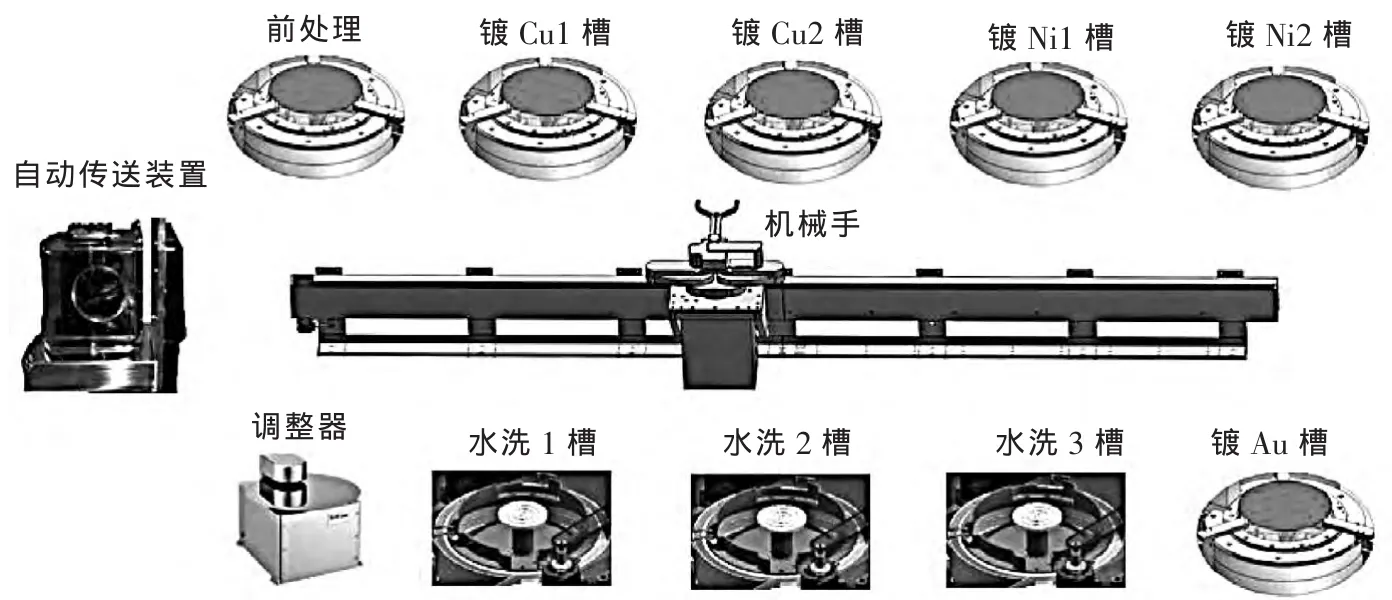
▲图1 设备外观及布局图
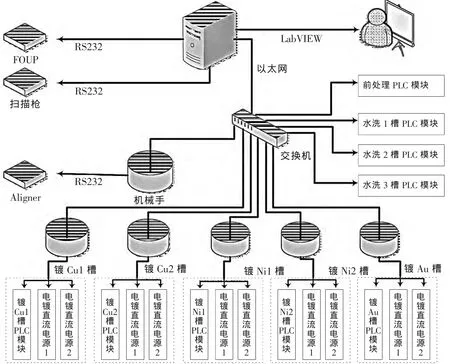
▲图2 晶片电镀设备控制系统图
本设备适用于半导体前道芯片铜互连电镀(Damascene)的工艺流程,包括 E-coating、EDPR、各式清洗等前后处理工序以及化学镀、电镀工序,可根据生产、工艺需要量身定制适用于4~12in(1in=24.5 mm)晶片。设备可实现手动、半自动、全自动控制模式,外观及布局如图1所示,主要包括晶片传送机械手、自动传送装置、调整器、前处理、2个镀Cu槽、2个镀Ni槽、1个镀Au槽、3个水洗槽。自动传送装置用于半导体制造过程中硅晶片的自动传送。采用了安全密封装置,不仅能防止该产品自身产生尘粒,还能够防止晶片出入之际产生的尘粒。前处理是为了提高晶片电镀质量所做的相应处理,在每次完成一次电镀工序后,都会进行一次水洗工序。本设备一共加入了3个水洗槽,大大提高了生产效率,降低了成本。整个加工流程是:晶片传送机械手将晶片从自动传送装置中取出,经过调整器工序,传送到前处理槽,再根据所设定的工艺配方,进行相应的电镀工艺,每完成一次电镀工序,都会经过一次水洗工序,晶片所有工序完成后,将晶片放入自动传送装置中。
系统的通信主要包括:自动传送装置模块、机械手和电镀槽(欧姆龙PLC和电镀直流电源)模块3个部分。上位机使用研华工控机,内部增加多串口卡及千兆以太网卡。图2所示为本设备控制系统图,除了调整器以外,每个槽位都有独立的PLC控制模块,且每个镀槽都可以单独对晶片进行电镀,通过设置不同的工艺参数,可以满足不同的产品需求。
2 基于LabVIVE的串口与自动传送装置之间的通信
自动传送装置用于半导体制造过程中硅晶片的自动传送,能读取晶片信息,包括晶片数量、重片或倾斜等信息,其通信方式采用的是RS232C。在通信过程中,上位机采用被动接收方式接收数据,为保证接收数据的正确性,采用数据帧的方式进行通信。LabVIEW软件通过串口配置节点,设置串口通信的波特率、数据位数、校验方式、停比位等参数,参数设置好后,利用读串口节点读取串口缓冲区的数据,程序中设置每70 ms从串口中读取数据,根据不同的数据作出相应的处理,并将手动和自动模式命令分开处理,防止数据产生冲突而被忽略,整个程序结束时,利用关闭串口节点函数,将占用的串口资源释放掉[6]。
自动传送装置的协议格式见表1,它的所有命令都由ASCLL字符组成。ACK中,串口通信发出的指令格式Command是具体的命令内容,[LF]是命令结束标志。Data/Event是自动传送装置响应的数据,具体有晶片信息、状态等数据,包括错误代码(ERR:xxx+[LF])等。如果由于外部条件使自动传送装置的状态改变,自动传送装置会响应Event数据,也仅仅是在发送字符ASCLL过程中发生,而其它条件下不会接受到它 的 响 应 。 例 如 :CFG_SLOTS 17+[LF], 其 中CFG_SLOTS是设置槽位命令,17是设置的槽位数,[LF]是结束标志。在完成命令后,自动传送装置响应的信息是0+[LF]。在通信过程中,如果发生错误,自动传送装置就会反馈C+Error code+[LF],如果自动传送装置的状态发生改变,就反馈C+state code+[LF]。
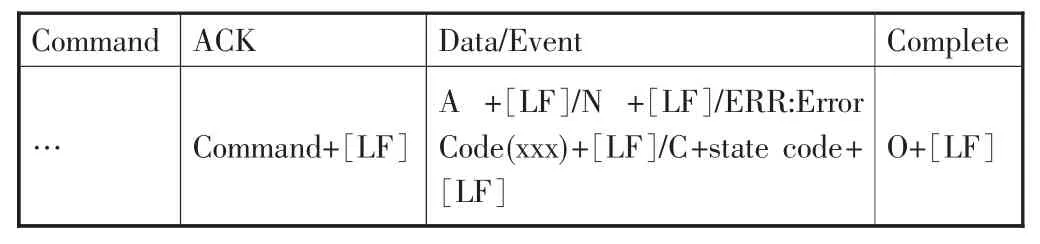
表1 自动传送装置协议格式

表2 机械手协议格式

表3 FINS指令格式

表4 FINS响应格式
3 基于LabVIEW的以太网与机械手的通信
机械手为韩国生产的水平传输机械手,具有高效、快速、平稳等特点。通信方式采用以太网,协议格式见表2。LabVIEW内部集成的TCP/IP协议模块,可以快速实现LabVIEW与机械手之间的以太网通信。TCP协议提供了可靠的网络连接,其整个过程为:首先服务器端通过主机名或者IP地址与端口建立侦听,等待客户端连接,然后客户端根据主机的IP地址和端口号发出连接请求,等到服务器和客户端建立连接后,通过读写函数与 TCP 数据进行通信[7]。
表2中,机械手的Command主要包括位置、参数、移动等指令。ACK是以太网通信发出的指令格式,由“-”开头,中间是具体的通信命令,最后是命令结束标志。Data/NAK是机械手响应的数据,具体有速度、位置等数据, 包括错误代码 (ERR:xxx[CR][LF])等。Complete是在命令完成后机械手响应的信息,格式由“>”开头,中间是具体的通信命令,最后是命令结束标志, 例如: 命令格式为 “-PUTINTO/T 2,3,1[CR][LF]”,表示通过上手臂将晶片旋转 180°后放到镀Cu1 槽中,其中“PUTINTO”表示放晶片,“/T”表示将晶片旋转180°,“2”(开始已定义好的参数)表示镀Cu1槽,“3”表示自动传送装置中第三个槽位的晶片,“1”表示用机械手的上手臂,“[CR][LF]”是结束标志。 在完成命令后,机械手响应的信息是“>PUTINTO/T 2,3,1[CR][LF]”。
4 基于LabVIEW的以太网与镀槽模块通信
电镀槽共有3种不同的槽位,槽位内部除了存储不同的电镀液以及进行相应的电镀生产外,其它硬件电器设备一致,因此控制模块的PLC及电气元件都使用相同的型号。本文仅介绍镀槽中的镀Cu1槽,在镀Cu1槽的控制模块中,主要由欧姆龙PLC模块和电镀直流电源与上位机进行通信。
每个镀槽都有独立的PLC控制模块,欧姆龙PLC是基于LabVIEW的以太网来进行通信的,其通信是基于FINS/TCP方式。FINS帧分为FINS指令帧和FINS响应帧两种形式,指令帧在发送FINS指令时使用,响应帧则在接收到FINS指令后对其返回响应时使用,它们都是由一个FINS报文 (存储传输控制信息)、一个FINS指令域(存储一个FINS指令)以及一个FINS参数/数据域(存储指令参数和发送/响应数据)所组成。响应帧的FINS指令域内容与所接收到的FINS指令域相同。
表3是FINS指令格式,表4是FINS响应格式,ICF为信息控制域,用于标明指令和响应;RSV为系统保留;CGT为网关允许数据目;DNA为目的网纲号;DA1为目的节点号;DA2为目的单元号;SNA为源网络号;SA1为源网节点;SA2为源单元号;SID为服务和响应的标识号,可任意设置,指令各响应对应相同;MRC和SRC分别为FINS指令的主指令和从指令;参数/数据域,用于标明所操作的数据地址、范围等,在表4中MRES和SRES构成响应码,用来检测数据错误信息[8]。
欧姆龙PLC的以太网通信通过发送FINS指令实现,上位机发送FINS指令,可以直接读取或写入PLC相应的数据,PLC部分无需编写接收和发送程序。本系统采用LabVIEW的TCP/IP实现通信,上位机向PLC发送FINS指令,读取PLC的内存区域数据。

▲图3 操作界面的主要界面
电镀直流电源使用美国艾德科斯公司产品,是单输出直流功率开关电源,配有RS232/USB/GPIB/以太网通信接口,本系统采用以太网与上位机进行通信。以太网通信基本原理是一样的,在电镀直流电源控制过程中,只需对电流进行设置,通信指令比较简单,整个设备的主要操作界面如图3所示。
5 结束语
整个通信系统中,各工序模块都有独立的通信系统,通过上位机协调各模块之间的通信,彼此独立编写的通信系统模块,确定各模块之间的数据交换安全可靠,同时也很好地处理了整个系统的人机交互,数据采集,数据监控和状态显示。本系统自动化程度高,减轻劳动强度,减少人为操作的失误,每个动作结合紧凑,极大地提高了晶片电镀的安全性和稳定性。
[1] 张伟锋,曹颖杰,李永红.圆片级电镀技术探讨[C].2010中国电子制造技术论坛,成都,2010.
[2] 段晋胜,魏红军,胡子卿.晶圆精密电镀中的垂直剪切镀设备的研制[J].电子工艺技术,2013,34(3).
[3] 刘子玉,蔡坚,王谦,等.硅晶圆上窄节距互连铜凸点[J].清华大学学报,2014,54(1).
[4] Richar Hollman.双面电镀在先进封装中应用的可行性研究[J].电子工业专用设备,2012,206(17).
[5] 刘龙启,李银.基于LabVIEW的以太网数据监听与通信[J].国外电子测量技术,2012,31(7).
[6] 吕向锋,高洪林,马亮.基于LabVIEW串口通信的研究[J].国外电子测量技术,2009,28(12).
[7] 陈树学,刘萱.LabVIEW宝典[M]北京:电子工业出版社,2013.
[8] 戴斌,朱建平,袁焱.基于FINS协议的OMRON PLC与上位机以太网通信的实现[J].电子技术,2009,9(14).
猜你喜欢
表面工程与再制造(2022年1期)2022-05-25
测控技术(2018年8期)2018-11-25
制造技术与机床(2017年4期)2017-06-22
电镀与环保(2016年3期)2017-01-20
通信电源技术(2016年1期)2016-04-16
电子世界(2016年22期)2016-03-12
超硬材料工程(2016年1期)2016-02-28
电镀与环保(2015年6期)2015-03-11
机电信息(2015年3期)2015-02-27
振动、测试与诊断(2014年1期)2014-03-01
