小型四旋翼飞行器设计仿真
2015-06-12 12:04:02李闻先
长春工业大学学报 2015年6期
尤 元, 杨 苏, 李闻先
(1.长春工业大学 电气与电子工程学院,吉林 长春 130012;2.中国科学院长春光学精密机械与物理研究所,吉林 长春 130033)
0 引 言
随着航空航天技术的不断发展,微小型无人机凭借在自然灾害应急指挥、生产安全环境大范围监测以及军事侦察与训练等领域的广泛应用,成为全世界航空航天领域的重要研究方向之一。近年来四旋翼飞行器由于其结构简单、制作成本低、垂直起降、环境适应性强等优点在军用及民用领域应用越来越广泛。其主要应用领域可分为四大部分:自然灾害发生现场,可用于灾情观测与搜救;面积过大或环境复杂导致人员难以到达生产、勘探现场的监测;大规模群体性事件的跟踪与实时拍摄;军事侦察与军事设施安全监管[1]。
世界上第一架四旋翼飞行器是一架载人飞机,被 命 名 为Gyroplane-1,是 在1907年 由Breguet兄弟设计并完成制作的。它只能通过控制油门进行垂直起降,技术上相对落后。它的机身重量为578kg,旋翼直径为8.1m,能够达到的最大飞行高度只有1.5m[2]。进入21世纪,随着半导体技术、机械制造技术、MEMS传感器及嵌入式控制等相关学科的迅猛发展,欧美一些国家在小型及超小型无人飞行器方面取得了卓越的进展。其中比较有代表性的有:美国的MIT、斯坦福大学,法国贡比涅技术大学,日本的千叶大学等,商业团队有德国Microdrone,Ascending Technology及美国的Draganfly等[3-5]。
文中采用ATMEL公司的单片机ATMEGA168为控制核心控制无刷直流电机,并通过采用高度计、加速度计、陀螺仪等传感器来测量飞行器的姿态信息,最后通过滑模控制算法完成了对飞行器飞行控制的仿真与控制功能。
1 四旋翼飞行器控制系统的硬件设计
依据飞行器的技术指标与应用领域,在元器件选型、软硬件、模型预算法等方面进行综合设计,设计过程中充分考虑了飞行器的实用性、可靠性、可操作性、可维护性及可扩充性。飞行器控制系统组成如图1所示。
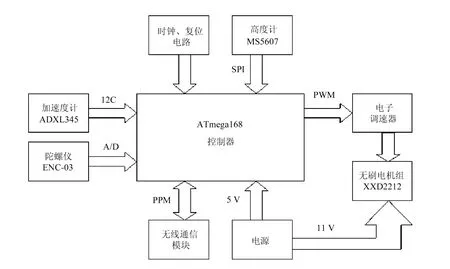
图1 飞行器控制系统组成框图
本系统包括中央处理器MCU、电源模块、传感器模块、通讯模块和机体等。
中央处理器作为系统的核心部件,需进行大量的数据处理和逻辑运算,并且需要具有足够的外部接口。多数直流无刷电机的额定工作转速均大于10 000r/min,即旋转周期小于6ms,那么要求飞控系统完成姿态检测及各种控制算法运算的时间间隔应远小于6ms。文中选用的是ATMEL公司的ATMEGA168单片机,其硬件乘法器运算只需两个时钟周期且指令执行速度为20Mips,也就是说绝大多数指令均可在一个50ns的单周期内执行完毕,因此,该单片机适用于数字信号处理与复杂算法的快速运算领域[6]。
作为测量控制单元核心的ATMEGA168单片机的主要作用是完成飞行姿态信息的采集、分析与处理;控制算法运算;整机时序的运行;地面指挥系统的通讯控制以及PWM脉冲对驱动电路的控制。此外,该控制核心可以进行5种休眠模式(省电模式、空闲模式、ADC噪声抑制模式、掉电模式、待机模式)以及极低的功耗(正常模式:在32kHz,1.8V时,工作电流15μA,在1MHz,1.8V时,工作电流250μA,掉电模式时,当工作电压1.8V时,工作电流仅0.1μA),因其硬件资源丰富,使得外围结构设计变得简单,从而能够很好满足系统的低功耗要求。
四旋翼飞行器的设计重点是姿态控制[7],文中采用惯性测量方法进行姿态控制,通过惯性测量单元(IMU)进行有效的位置姿态信息采集。陀螺仪与加速度计协同工作对机体三个轴向的角速度与加速度信息进行精密采集,机体姿态的精准定位减小了误差的影响。飞行高度测量的原理是通过相对大气压差来确定飞行器的飞行高度,因此选用精确的压力传感器可完成测量目的。本设计中系统选用瑞士Intersema公司的MS5607-B作为高度测量装置,以日本村田ENC-03陀螺仪和ADI公司的ADXL345加速度计进行角速度测量[3]。
四旋翼飞行器具有如下功能要求:①调速系统快速、平稳;②基于最小转矩提供精确速度控制的先进算法及快速处理能力;③控制器具有产生多路高频、高分辨率PWM的能力;④具有由同一控制器完成姿态检测、电机控制和与地面通信的能力;⑤能有效减少元器件数、简化线路板布局和降低潜在故障点,以便以简约形式实现系统方案[8]。最终设计电路图与方案如图2所示。
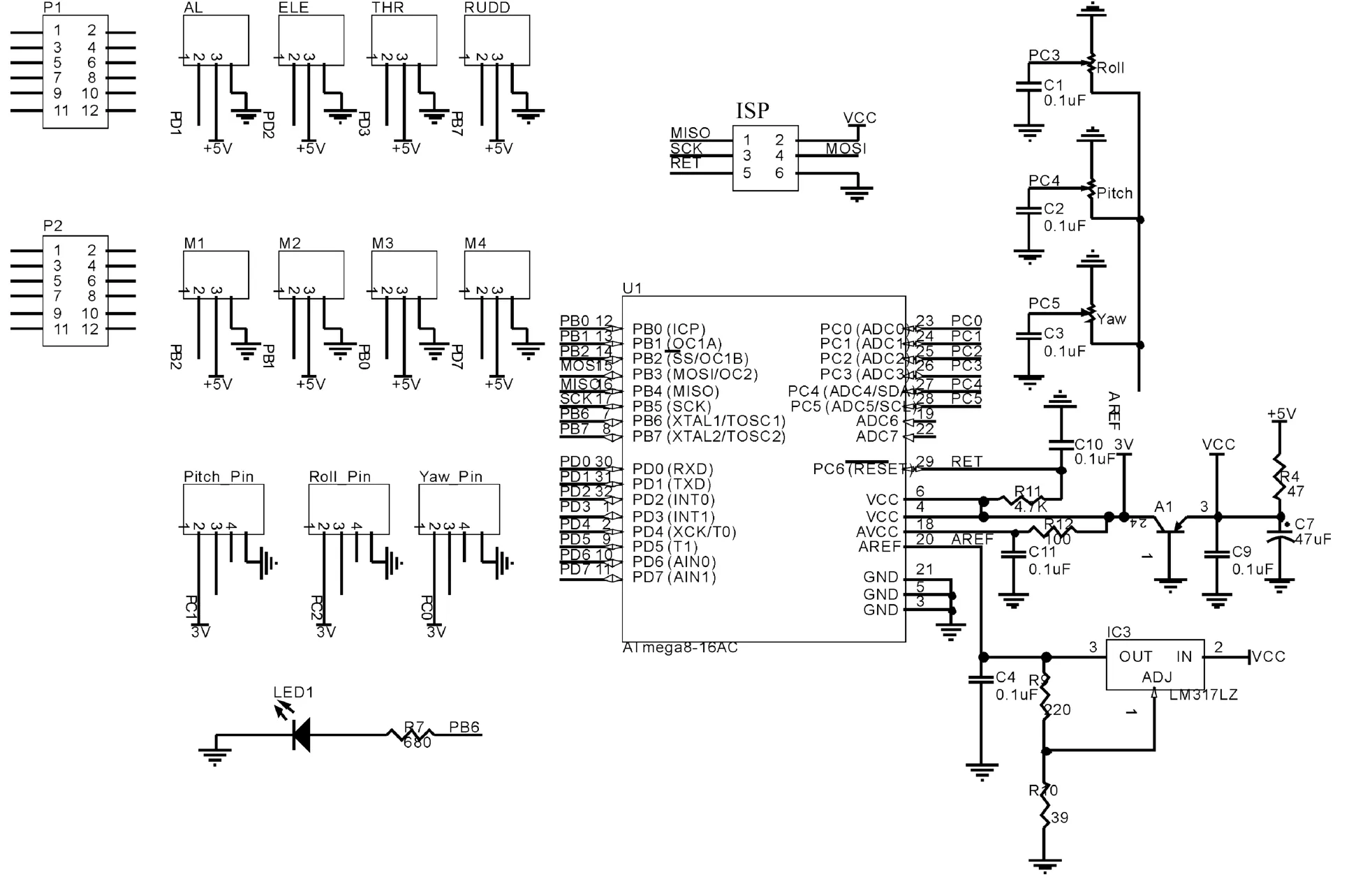
图2 四旋翼飞行器实物及控制板原理图
2 飞行器动力模型
本系统可视为具有十字固定交叉结构,并具有4个独立电机驱动螺旋桨的刚性系统,系统的输入变量为4个螺旋桨的转速,输出变量为飞行器的位置(x,y,z)与飞行器的姿态角(φ,θ,Ψ)。
四旋翼飞行器简化模型如图3所示。
建模的基本思想是建立地面坐标系下刚体位移变量(x,y,z)与姿态角变量(φ,θ,Ψ)的牛顿第二定律方程和角动量定理方程[3]。
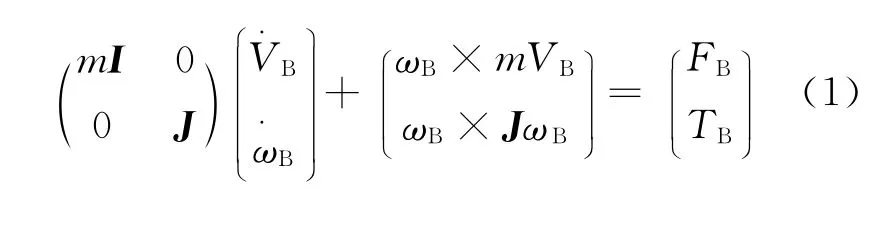

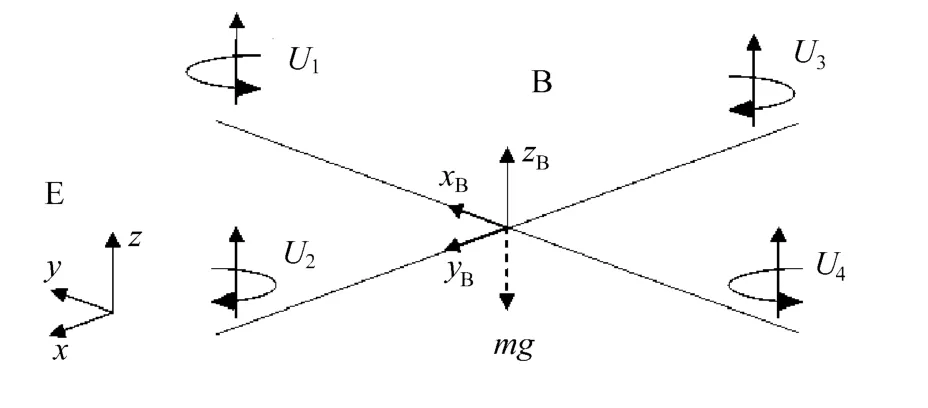
图3 四旋翼飞行器简化模型

式中:FB——机体受力,FB∈R3;
TB——机体转动力矩,TB∈R3;
VB——机体的线速度,VB∈R3;
ωB——机体角速度,ωB∈R3;
J——机体的转动惯性矩阵,J∈R3;
I——单位矩阵,I∈R3。
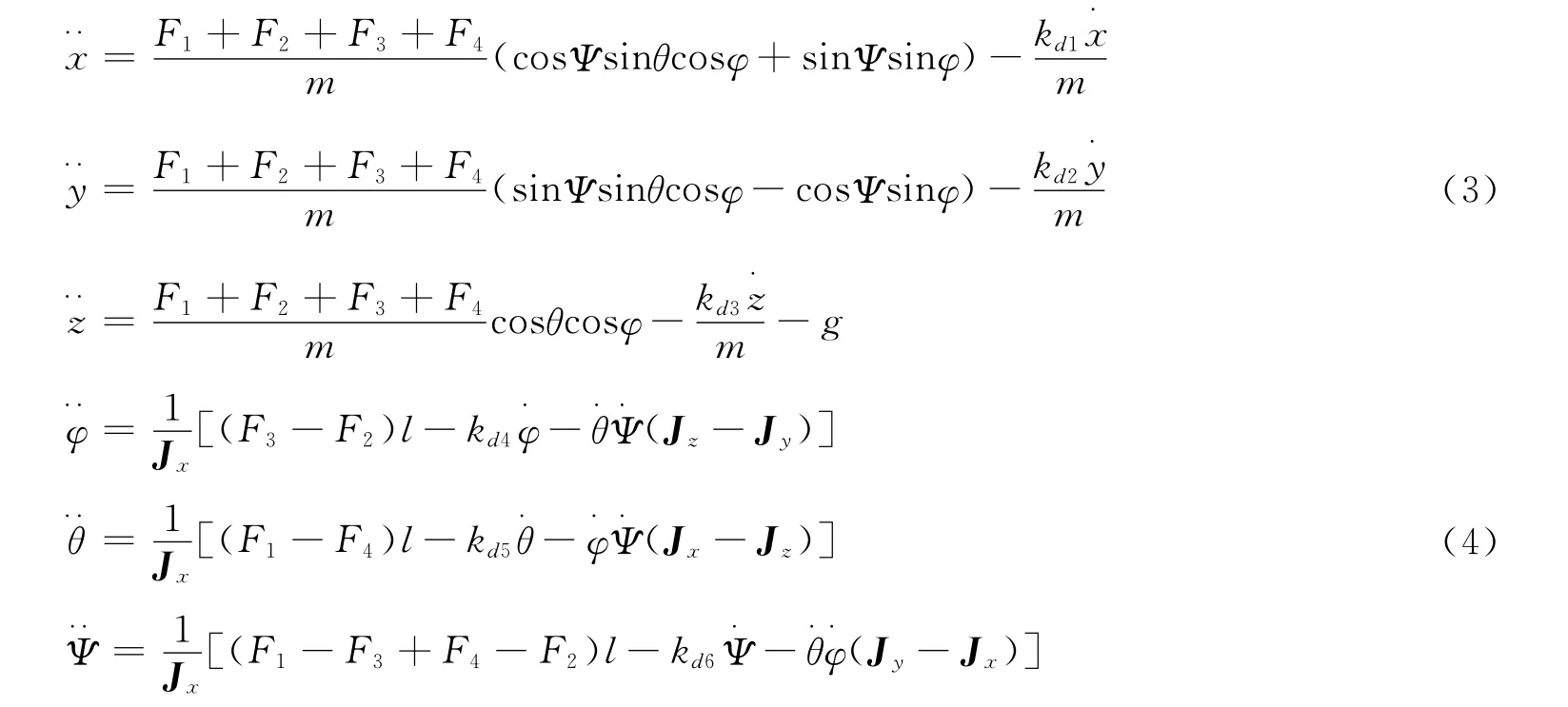
通过积分推导式(1)、式(2),可得飞行器的导航方程和扭矩方程[3]:
3 滑模控制器设计
滑模控制器是一种非线性控制,所谓非线性控制,即不连续地进行控制,滑模控制在控制过程中进行自身结构的变化。该控制算法响应速度快、物理实现简单、系统鲁棒性好,对扰动不敏感。系统在控制过程中,进入滑模面移动且满足匹配条件,控制目标的运动轨迹稳定。不会受到参数变化及各种扰动的影响。文中设计的控制系统针对四旋翼无人机的动力及结构特性,采用SMC控制方法进行飞行器的姿态与高度控制。滑模控制器保证了李雅普诺夫稳定性,同时也保证了动力学特性的要求以及非线性[9-10]。
四旋翼飞行器动力模型的状态方程由飞行器动力模型的推导结果得出。

式中:Jx,Jy,Jz——分别为四旋翼无人机对x,y,z轴的转动惯量。

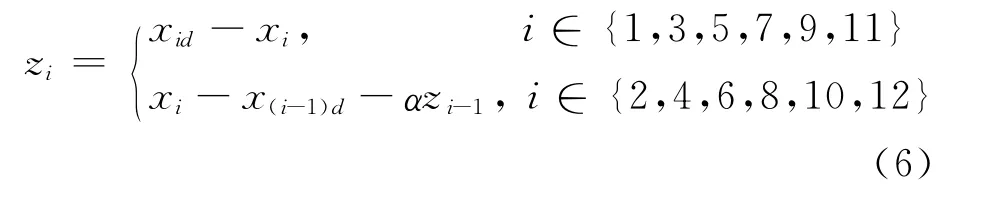
首先,定义误差变量
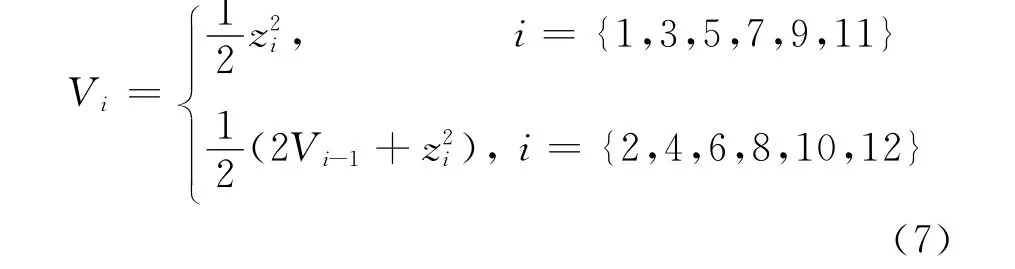
选取李雅普诺夫函数:
以高度z控制为例,选取滑模面为:

其李雅普诺夫函数为:
根据滑动模态的到达条件可知:

按趋近律的方法来设计推导控制变量,那么设滑模面的趋近律为指数趋近律。

式中:ε,k——均为大于零的正数。

整理可得:

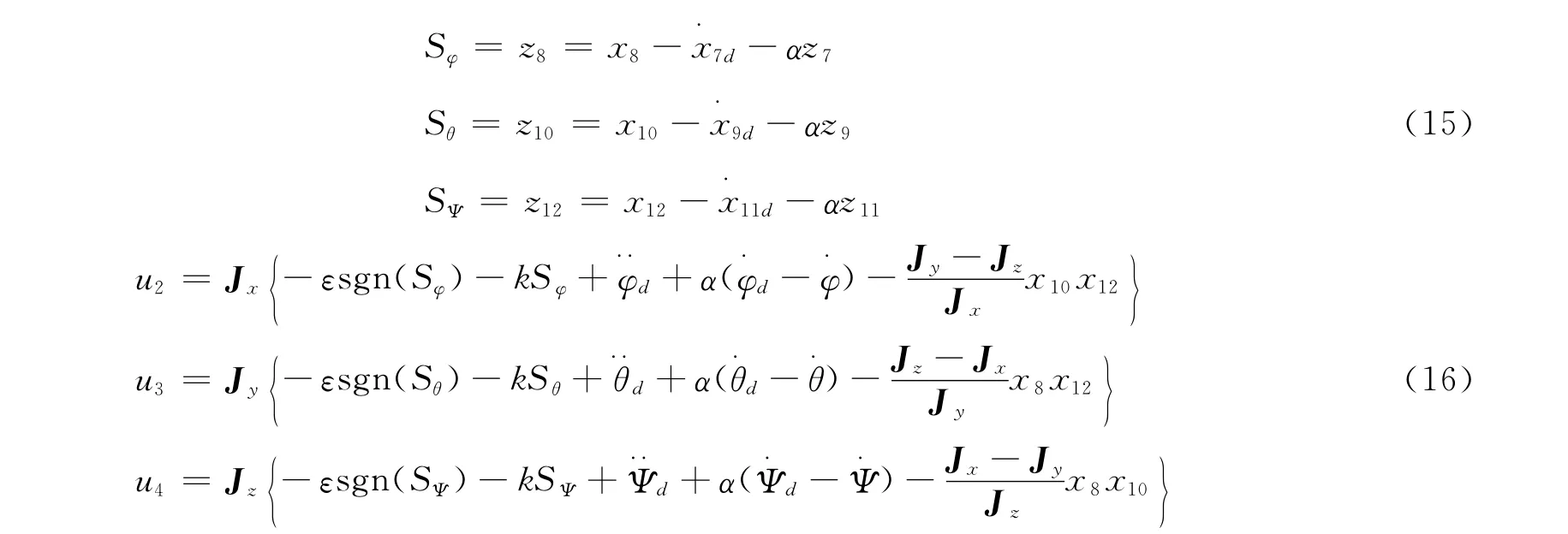
同理可得俯仰、横滚、偏航控制的控制律如下:
4 控制器Matlab/Simulink实现与仿真结果分析
4.1 滑模控制系统Simulink设计
控制器的Simulink方框图如图4所示。
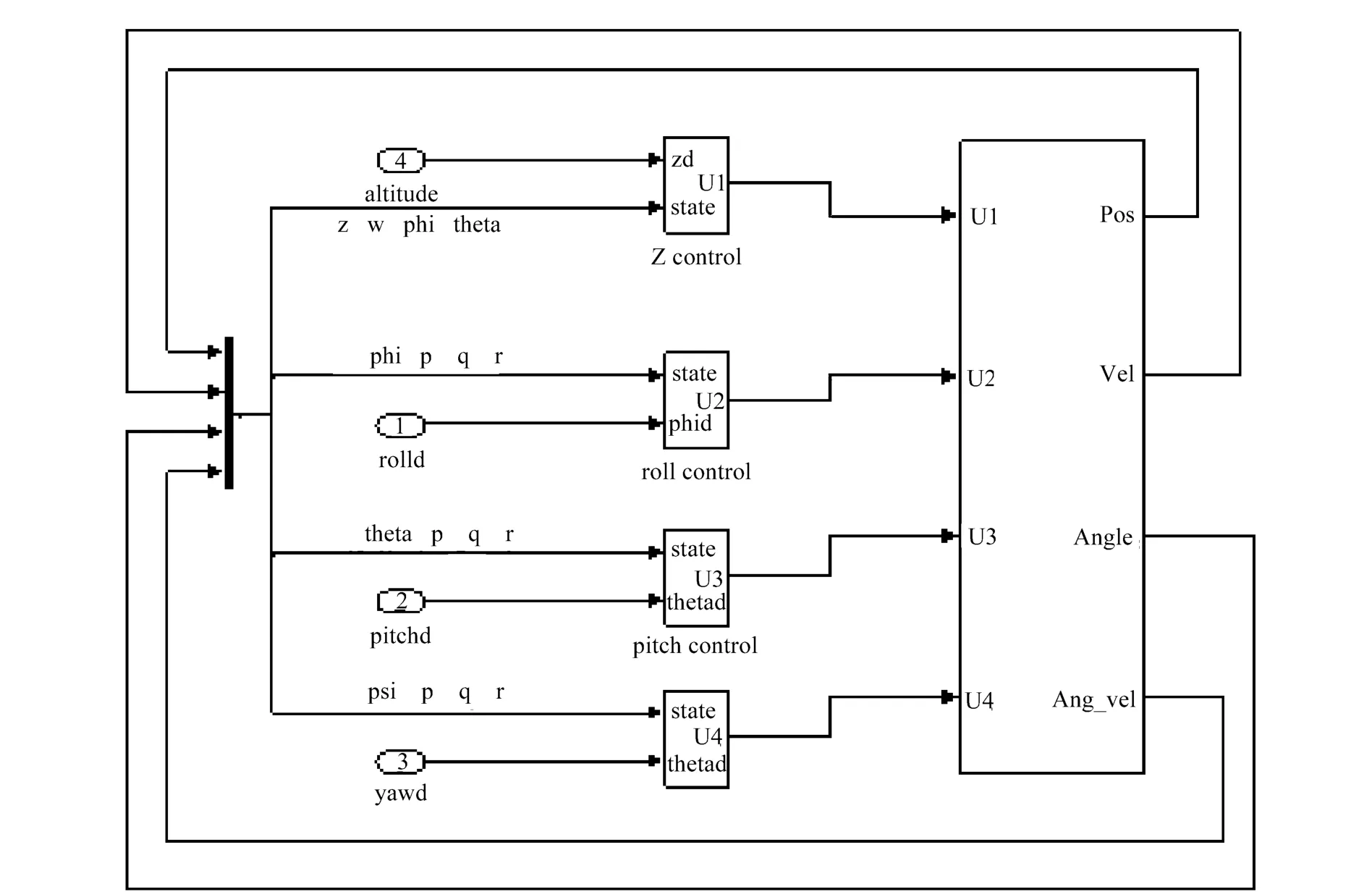
图4 滑模控制器的总体设计
其基本思想是首先设计参考模型的理想姿态变化轨迹,根据上述滑模控制规则,使系统的状态变量与理想状态变量的偏差控制在切换面之内,达到快速跟踪控制的目的。
根据上述理论推导结果,搭建的仿真系统如图5所示。
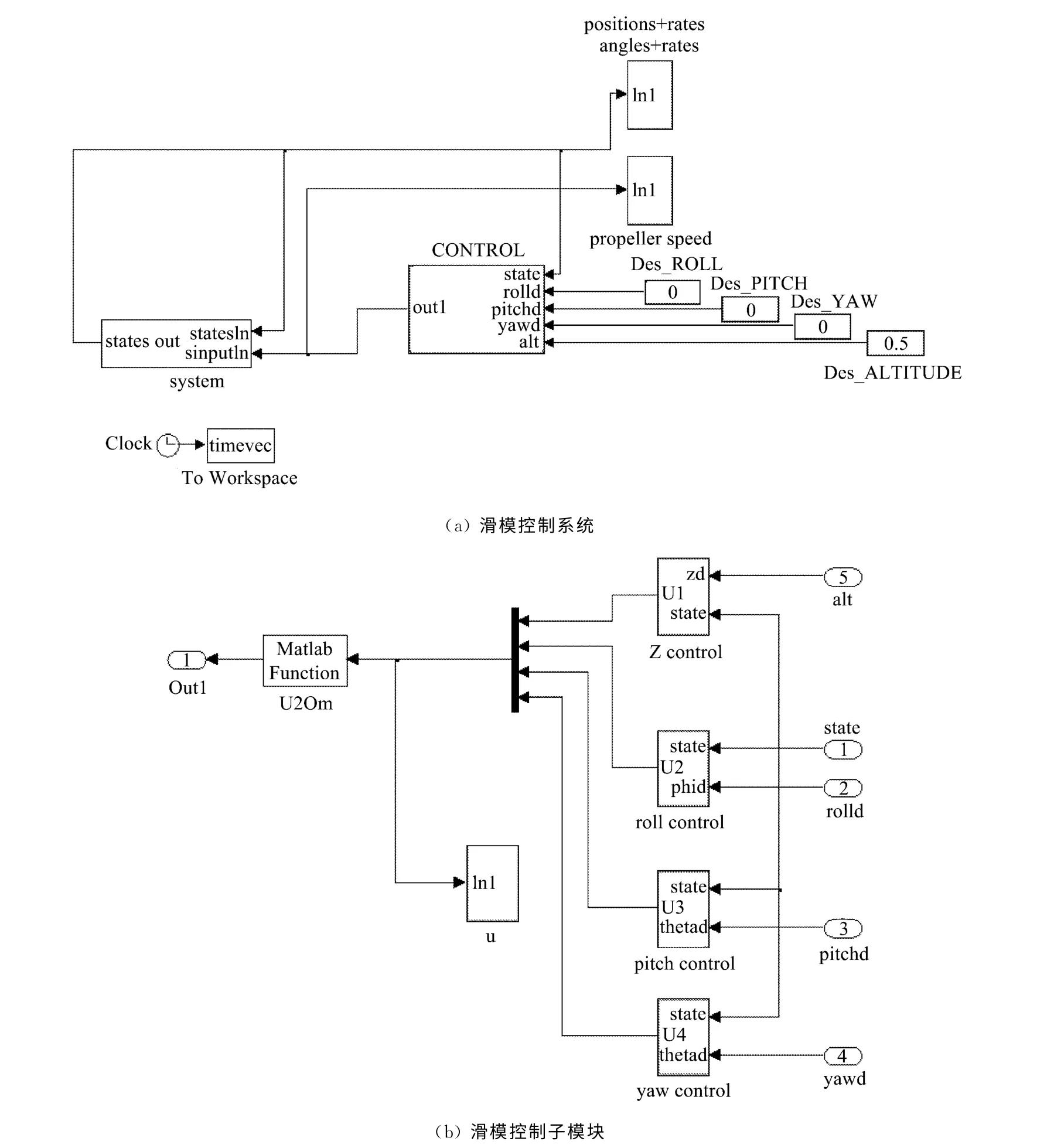
图5 滑模控制系统的Simulink实现与滑模控制子模块
系统的输入变量为期望的控制高度与控制姿态,控制子模块主要功能是实现滑模控制的主要算法,控制模块的输出作为系统动态模型的输入进行迭代计算,最终达到控制目的。
整个控制系统的核心部分为滑模控制子系统,其主要包括横滚角φ控制模块、俯仰角θ控制模块、偏航角Ψ控制模块以及高度z控制模块4部分组成,它通过计算飞行器的实时反馈状态变量和飞行器输入制定控制值来计算控制律,从而实现飞行器的制定高度与姿态飞行。
4.2 飞行仿真结果分析
整个四旋翼飞行器参数见表1。

表1 飞行器模型参数
系统高度z的初始值为0m,姿态角初始值为(0.5,0.5,0.5)(rad),控制目标为飞行器悬停(0,0,0)(rad),悬停高度为0.5m,分别采用PID控制和滑模控制系统仿真得到系统的状态变量响应曲线如图6和图7所示。
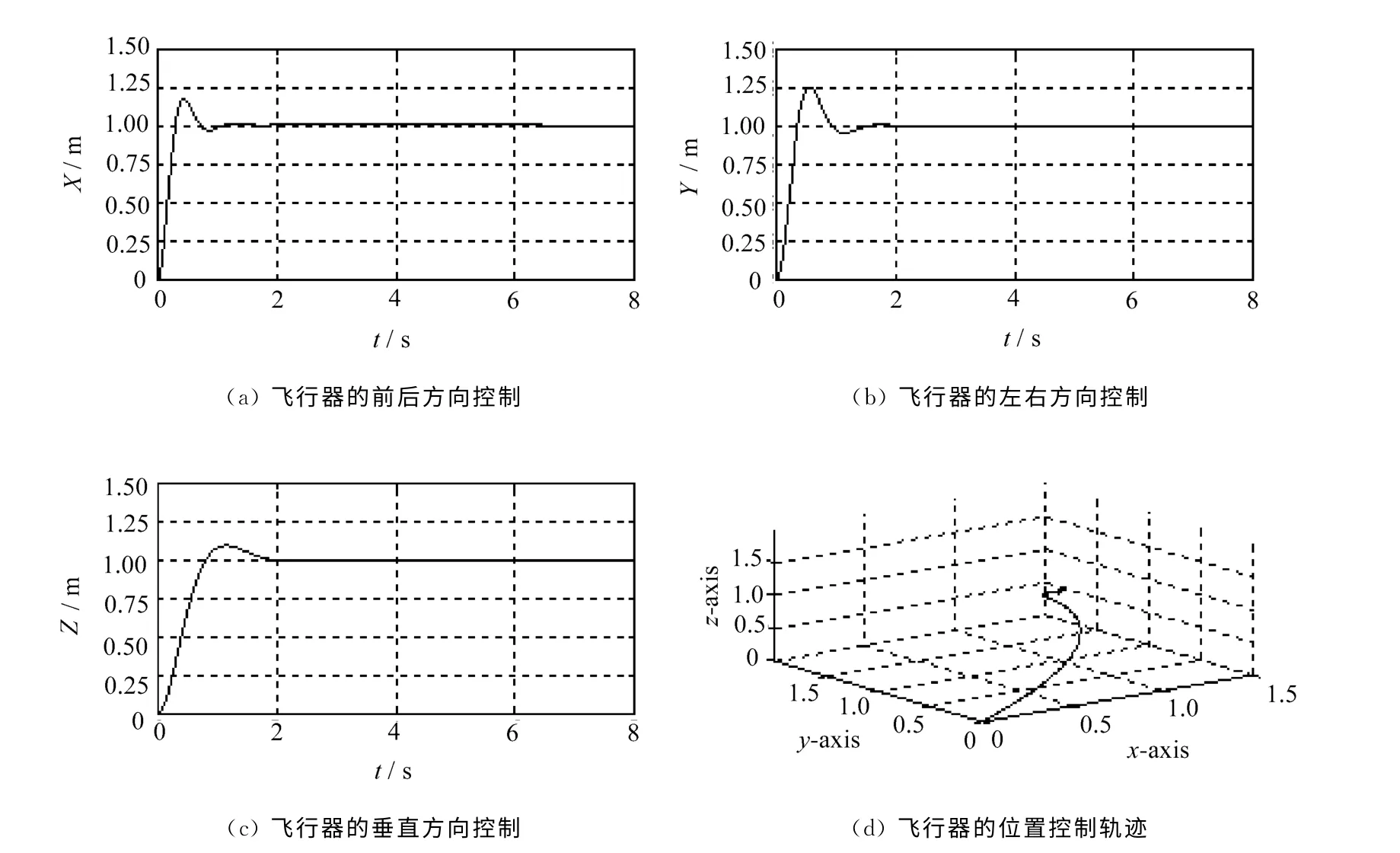
图6 PID控制仿真结果
图7 滑模控制器控制仿真结果
由图中响应时间可知,滑模控制器比PID控制器效果更优,其响应时间是1.6s,并且滑模控制过程平稳过渡。而在PID控制中存在一定的超调和震荡,这是由于滑模控制器迅速进入滑模面,从而达到滑动模态。因此,可达到图7(d)的效果。
在仿真中,设定初始值为:系统高度为0,姿态角(0.5,0.5,0.5)(rad);控制量设定为:高度0.5m,悬停姿态角(0,0,0)(rad)。真实环境中存在的风力等干扰因素,因此要求飞行器具有一定的鲁棒性,为验证滑模控制算法的鲁棒性,在仿真过程中的各方向上加入一定幅度的随机力矩(τφ=τθ=τΨ=20),仿真结果如图8所示。
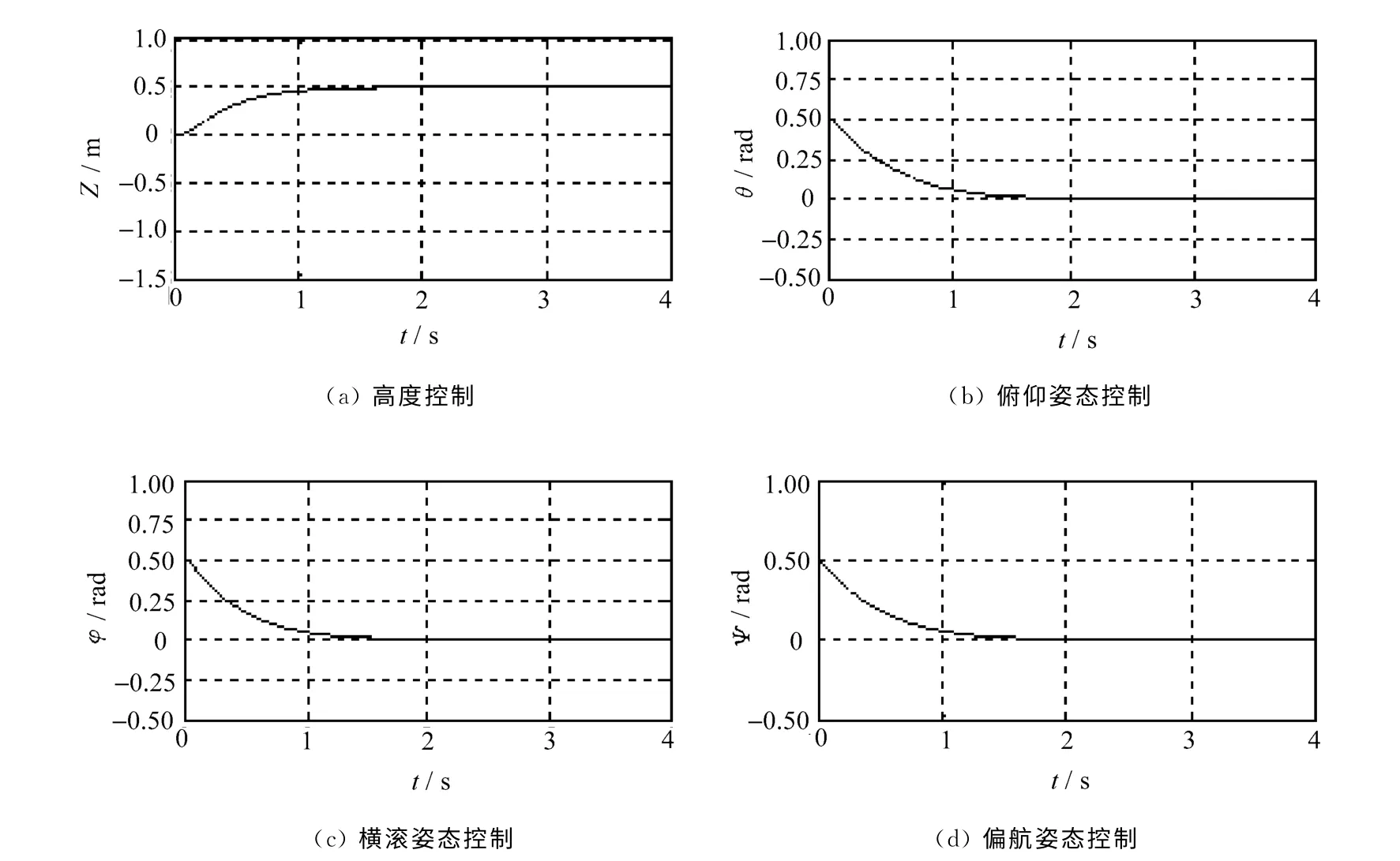
图8 高度与姿态的滑模控制响应曲线
结果表明,该算法具备一定的抗干扰能力。
5 结 语
研究并设计了一款小型四旋翼飞行器,该飞行器系统以ATMEGA168单片机为控制核心,陀螺仪、加速度计和气压计作为惯性与高度测量装置,完成姿态检测、电机控制和与地面通信等功能。同时,针对6自由度欠驱动四旋翼飞行系统模型的控制问题建立了系统驱动模型,并采用滑模变结构控制算法进行控制。Matlab/Simulink模型的分析结果表明,该控制算法具有控制响应时间短、控制飞行平稳、强鲁棒性等特点,能很好地完成飞行器的控制任务。
[1] 郭杨,翁新武.基于AVR单片机的UAV飞行控制系统[J].长春工业大学学报:自然科学版,2013,34(2):228-235.
[2] Alexandros Soumelidis.Control of an experimental mini quad-rotor UAV[C]//IEEE 16th Mediterranean Conference on Control and Automation Congress Centre.2008:1252-1257.
[3] 尹立鹏,陈娟,王虎.加速度计应用[J].长春工业大学学报:自然科学版,2010,31(1):23-27.
[4] 尤元,四旋翼飞行器控制技术研究及其微功耗设计[D].长春:吉林大学通信学院,2013.
[5] 周德新,马腾达.四旋翼无人机飞控系统仿真平台研究[J].计算机测量与控制,2014,22(2):424-246.
[6] 刘峰,吕强,王国胜,等.四轴飞行器姿态控制系统设计[J].计算机测量与控制,2011,19(3):583-585,616.
[7] Minbc,Choch,Choikm,et al.Development of a micro quad rotor UAV for monitoring an Indoor envirment[J].Advances in Robotics,2009,5744:262-271.
[8] Atheer L Salih.Flight PID controller design for a UAV quadrotor[J].Scientific Research and Essays,2010,5(23):3660-3667.
[9] Atheer L,Salih M Moghavvemi.Modelling and PID Controller Design for a Quadrotor Unmanned Air Vehicle[C]//Automation Quality and Testing Robotics(AQTR),2010IEEE International Conference,2010:1-5.
[10] Jun Li,Yuntang Li.Dynamic Analysis and PID Control for a Quadrotor[C]//2011IEEE International Conference on Mechatronics and Automation.Bejing:[s.n.],2011:573-578.
猜你喜欢
北京航空航天大学学报(2021年9期)2021-11-02 08:24:16
军民两用技术与产品(2021年9期)2021-03-09 05:45:28
电子制作(2019年9期)2019-05-30 09:41:48
中国惯性技术学报(2019年6期)2019-03-04 09:50:06
测控技术(2018年4期)2018-11-25 09:47:26
测控技术(2018年3期)2018-11-25 09:45:40
制造技术与机床(2017年6期)2018-01-19 02:41:07
北京航空航天大学学报(2016年8期)2016-11-16 01:51:09
电源技术(2015年9期)2015-06-05 09:36:06
组合机床与自动化加工技术(2014年12期)2014-03-01 02:22:54