基于死区补偿的PMSM无传感器矢量控制方法
2015-06-10 08:53:12杨立永翟飞陈智刚
电气传动 2015年12期
杨立永,翟飞,陈智刚
(北方工业大学电气与控制工程学院,北京100144)
永磁同步电机因其结构紧凑、性能可靠而被广泛应用在风力发电、电动汽车、船舶驱动等领域[1]。在永磁同步电机无速度传感器控制系统中,需要利用定子电压对磁链进行估计,如果直接利用SVPWM 算法中的给定电压作为定子电压,则由于死区的影响,可能导致电机实际转子位置和估计转子位置有所偏差,从而降低了电机低速区的控制性能[2]。本文介绍的方法是采用反电动势法对转子位置进行跟踪估算,利用检测得到的电压、电流和建立的相关数学模型对电机的给定电压进行死区补偿,使定子电压给定值和实际值相等。这样估计转子位置就能较好地跟踪实际转子位置。最后通过基于TMS320F28335 控制板的硬件实验平台对上述理论进行了实际验证。
1 逆变器电压建模及死区补偿
1.1 逆变器输出电压的数学模型
由于死区的影响使实际输出电压扭曲,而且转速越低死区的影响越严重,从而使估算出的角度出现严重偏差。
经分析可知,实际A 相相对于母线中点n 的电压为

式中:Vdc为电网不控整流后给逆变器的直流母线电压;Vce为功率器件管压降;Vd为续流二极管的管压降。
SA=1表示A相驱动脉冲为高电平,SA=0 表示驱动脉冲为低电平。因此实际VAn是随着开关状态Ts和电流方向变化时间Ta(SA=1 的作用时间)而变化的[3]。
因Vce和Vd是随着电流的上升而增加的,故将和sA=Ta/Ts,代入式(1)中有:

同理可得:

在三相桥式逆变器的电路中,n 为直流母线的电位中点,o 为电动机绕组的中性点。故A、B,C 3 点相对于电动机中性点o 的电压和电流方程为
将上式和式(2)~式(4)化简:


式中:Ton为功率器件的开通时间;Toff为功率器件的关断时间;Td为死区时间。Vce-Vd和母线电压Vdc相比很小而被忽略。
1.2 新型电压补偿算法
从式(6)可以看出要精确地实现对逆变器输出电压的估计,需要精确地判断相电流方向。本文采用了一种电流方向的间接判断方法。根据电流矢量和电压矢量的功率因数角来间接判断电流方向[4]。
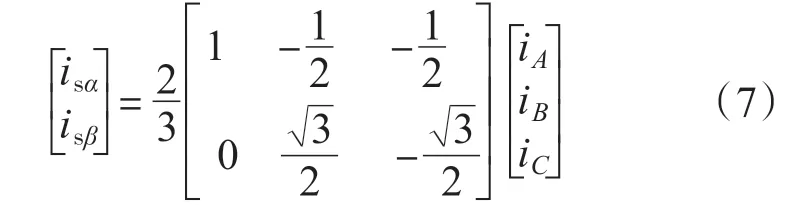
对逆变器输出的三相电流iA,iB,iC,进行Clark变换有
再将两相电流isα,isβ变换到以定子电压矢量为d轴的同步旋转坐标系上有:

其中 φ=arctan(usβ/usα)
式中:φ 为电压矢量和α 轴之间的夹角。
利用isd和isq可以得到电流矢量和电压矢量的夹角θ为

式中:θ 为功率因数角。
电压矢量和电流矢量之间的关系如图1 所示。在实际系统中,定子电压矢量的角度φ 是已知的,功率因数角θ 可以通过三相电流的瞬时值实时估计,根据图1所示,电流矢量和β 轴的夹角为:θi=φ-θ。
由电流矢量的角度θi就可以确定相应的三相电流的方向,进而确定需要补偿的偏差电压,θi和三相电流方向的关系如图2 所示。在图2中,由中心向外依次为A,B,C相电流的方向,+号表示电流方向为正,-号表示电流方向为负[4]。

图1 电压矢量和电流矢量的关系Fig.1 Relationship between voltage vector and current vector
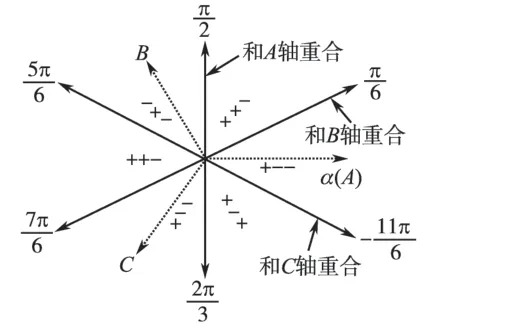
图2 θi 和三相电流方向的关系Fig.2 Relationship between θi and three-phase current direction
根据以上分析,文中采用的死区补偿的方法如下:
1)根据θi和图2判断A,B,C三相电流的方向;
3)利用计算出来的电压误差进行修正,根据式(6)可以得到α-β 轴电压的修正值公式为
α-β 轴的实际电压分别为

采用以上补偿方法后,消除了由于死区引起的电压误差,提高了低速时的磁链估计精度。
2 反电动势法PMSM的数学模型
永磁同步电机矢量控制系统中,常用的坐标系有两种:两相旋转坐标系(d-q 坐标系)和两相静止坐标系(α-β 坐标系)。要计算转子位置首先要得到定子磁链的值。定子磁链在α-β 坐标系上的电压模型是估计定子磁链的简单方法,是其他磁链估计方法的基础。此种估计方法,仅需要用到一个定子电阻参数,因此实现起来比较容易,同时具有较好的鲁棒性。
在α-β 坐标系上,定义感应电动势矢量为

定子磁链矢量和感应电动势矢量之间的关系为

对式(10)两边进行积分可得

把式(11)换算成α-β 坐标系分量的形式有

但由于在估算的过程中,纯积分环节可能造成电压模型的估计精度受电压和电流信号的直流分量、初始误差的影响,尤其在低频时,这种影响尤为严重。为了解决这个问题,引入低通滤波器来代替基本电压模型中的纯积分环节[4]。
根据式(12)可以得到基于低通滤波器实现的定子磁链估计器的表达式为

根据式(13)和图3可得永磁同步电机的转子位置θi和转速ωc分别为[5]

图3 PMSM中坐标系之间的关系Fig.3 The relationship between the coordinate system in PMSM
3 系统实验研究分析
本文建立了基于TMS320F28335 控制板的永磁同步电机无速度传感器矢量控制系统的硬件实验平台。控制系统的原理框图如图4所示。

图4 基于死区补偿的无传感器PMSM控制系统框图Fig.4 Sensorless control system of PMSM diagram based on dead zone compensation
为了验证这种控制方法的正确性,进行以下实验研究,PMSM采用登奇GK6061型号电机,额定功率为0.88 kW,定子电阻为2.875 Ω,定子电感为0.008 5 mH,额定转速为1 200 r/min,额定电压为160 V,额定电流为5.5 A,额定转矩为4.5 N·m,极对数为3。开通关断时间分别为ton=1 μs,toff=1 μs,开关管导通压降Vs=2 V,续流二极管导通管压降Vd=2.5 V,设定死区时间td=2.5 μs,开关频率为2.5 kHz。
图5a、图5b分别为实验状态下空载电机处于低速(50 r/min)情况死区补偿前后的转子位置波形图。图5a 中估计的转子位置有明显的偏差。图5b两波形基本无偏差。

图5 50 r/min时电机实际转子位置和估计转子位置对比Fig.5 Comparation between the actual rotor position and the estimated rotor position when motor 50 r/min
图6 为空载电机处于低速(50 r/min)情况下的死区补偿前后的定子电压usa波形图。图7a、图7b 分别为死区补偿前后永磁同步电机转速为50 r/min时突加负载的情况下估计转子位置和实际转子位置的对比以及相应的电流波形变化图。从图7 可以看出电机在突加负载的情况下,死区补偿前转子位置的估计值和实际值出现较大的相位偏差,而死区补偿后估计转子位置和实际转子位置几乎无偏差且电机能良好运行,系统的恢复时间约为200 ms,电流波形依然较好。
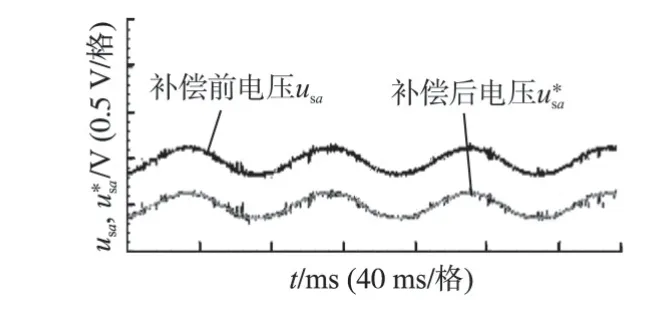
图6 50 r/min时电机死区补偿前后定子电压usa 波形对比Fig.6 Stator voltage usa waveform comparison before and after compensation when motor 50 r/min
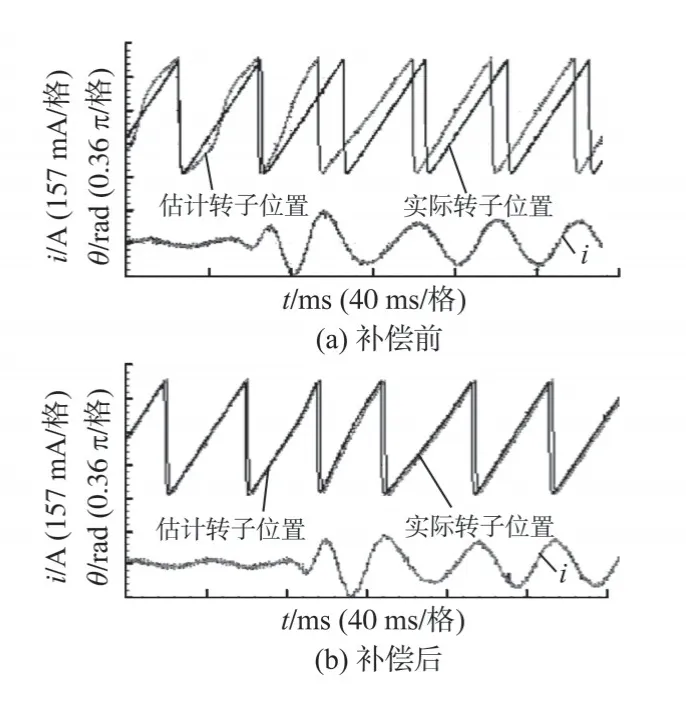
图7 电机带载50 r/min时转子位置和电流波形图Fig.7 Rotor position and current waveforms when the load motor 50 r/min
4 结论
本文对永磁电机控制系统中的逆变器输出电压进行建模,并基于该模型提出一种新型死区补偿方法,从而使利用反电动势法估算出来的电机转子位置更精确地跟踪实际转子位置。反电动势法虽然能够估算出电机的转子位置和转速,但估算准确性对电机参数和转速具有较强的依赖性,当系统受到死区影响后,转子位置估算值容易偏离实际位置而使得系统不稳定。运用死区补偿的算法能有效地提高PMSM 无速度传感器控制系统低速区域的精度和稳定性。
[1] Sergeant P,Dupre L.Losses in Sensorless Controlled Permanent Magnet Synchronous Machines[J].IEEE Transaction on Magnetics,2010,46(2):590-593.
[2] 李冉,龙雪涛,陈辉.基于锁相环的永磁同步电机无传感器控制[J].电气传动,2013,43(8):8-12.
[3] 杨立永,陈智刚,陈为奇.逆变器输出电压模型及新型死区补偿方法[J].电工技术学报,2012,27(1):183-185.
[4] 李正熙,杨立永.交直流调速系统[M].北京:电子工业出版社,2013.
[5] Hsieh G C,Hung J C.Phase-locked Loop Techniques:a Survey[J].IEEE Tansactions on Industrial Electronica,1996,43(6):605-619.
[6] 李亚斌,彭咏龙,李和明.自采样比例积分控制全数字锁相环的性能分析和实现[J].中国电机工程学报2005,25(18):64-69.
[7] Fabio Genduso,Rosario Miceli.Back-EMF Sensorless-control Algorithm for High-dynamic Performance PMSM[J].IEEE Tansarctions on Industrial Electronica,2010,57(6):2093-2096.
[8] Nobuyuki Matsui.Sensorless PM Brushless DC Motor Drivers[J].IEEE Trans.on IE,1996,43(2):300-308.
[9] Lin Kan,Zhu Z Q.Online Estimation of the Rotor Flux Linkage and Votage-source Inverter Nonlinearity in Permanent Magnet Synchronous Machine Drives[J].IEEE Transactions on Industrial Electronica,2014,29(1):419-421.
[10]牛威昆,许海平.直驱式永磁同步电机伺服系统死区补偿方法[J].控制与应用技术,2013,40(7):32-36.
猜你喜欢
防爆电机(2023年6期)2023-11-30 03:05:28
新型工业化(2021年8期)2021-10-23 10:27:10
电子与封装(2021年7期)2021-07-29 10:58:48
上海大中型电机(2021年2期)2021-07-21 03:01:32
工程数学学报(2020年6期)2021-01-09 02:44:40
防爆电机(2020年6期)2020-12-14 07:16:54
通信电源技术(2018年3期)2018-06-26 08:05:42
电气化铁道(2017年1期)2017-04-16 06:00:17
航空兵器(2016年5期)2016-12-10 17:14:13
电测与仪表(2014年21期)2014-04-04 12:32:08