
基于ACA-BFA算法的PMSM自适应模糊滑模控制
2015-06-10 08:53:04刘芳璇李益民崔晶王桂荣
电气传动 2015年11期
刘芳璇,李益民,崔晶,王桂荣
(1.西安铁路职业技术学院牵引动力系,陕西西安710014;2.中国计量学院机电工程学院,浙江杭州310018)
永磁同步电机(PMSM)的无速度传感器控制不仅有效避免了采用机械式传感器所带来的缺陷,如安装和连接故障问题,而且能够在高精度、高动态性能控制系统中准确估计电机转子的速度和位置。内埋式PMSM因其功率因数高、过载能力强而得到广泛应用,其无速度传感器矢量控制技术已成为研究的热点[1-3]。目前已经提出了很多估计其转速的方法,如文献[4]提出的卡尔曼滤波器法,文献[5-6]述及的模型参考自适应法等,以上两种估算方法较为复杂,尤其是在控制器的结构设计和参数调整方面存在一定困难。相比之下,采用旋转高频电压注入法提取转子位置及速度信息时,虽然要求电机具有较高的凸极率,但控制系统的一体化程度较高且结构设计较为灵活,易于调试且具备良好的鲁棒性。因此,旋转高频电压注入法得以广泛应用于无传感器PMSM矢量控制中[7]。
PMSM 在运行时其内部常包含非线性及时变负载扰动,常规的转子速度闭环PI控制器由于不能针对如上扰动在线调整而使被控对象的抗干扰特性和抗参数摄动能力不够理想,难以获得满意的过渡动态性能;相比之下,滑模控制器可以通过合理设计控制器结构消除外界干扰的影响,使系统具备克服参数摄动及外界扰动的能力[8-9]。因此,本文设计了一种自适应模糊微分积分滑模控制器,将其作为速度闭环的控制器,并采用蚁群-细菌觅食融合算法对滑模控制器的参数进行优化,同时基于旋转高频电压注入法的无速度传感器技术对PMSM 进行矢量控制。由实验结果可知基于ACA-BFA 的PMSM 无速度传感器自适应控制系统动态响应快速,抗负载扰动性能佳;转子速度和位置估计误差相对较小。
1 自适应模糊微分积分滑模控制器设计
PMSM在d-q坐标系下得数学模型如下:
定子电压方程:

定子磁链方程:

电磁转矩方程为

将式(2)代入得:

力矩平衡方程


选取积分滑模面为

根据到达滑模面的广义条件设计自适应微分积分控制器及控制律[10]分别如下式所示:

式中:e=x1-ω*;γ,ρ 均为正常数。
由式(6)~式(9)可得:

定义Lyapunov函数为

将自适应律式(9)带入得:

将式(8)带入得:

系统是渐进稳定的,即滑模的存在性和稳定性成立。
对控制变量u 设计模糊控制器,得:

2 自适应蚁群-细菌觅食优化算法
本文采用自适应蚁群-细菌觅食融合算法对自适应模糊微分积分滑模控制器参数进行优化。由蚁群算法生成初始解集,采用细菌觅食算法进行精确求解。自适应蚁群算法通过对蚁群个体移动、信息素自适应更新及轨迹平滑3 个算子的描述进行迭代寻优,对信息素更新算子采取自适应动态调整策略,可保证蚁群个体之间不会因移动步长过大或过小以致无法对整个解集进行充分寻优。步长较大,虽然可以在算法初期寻优过程中避免早熟,提高算法全局寻优能力,但是在算法后期会降低算法的寻优精度;步长较小,则会降低寻优速度但同时提高了求解精度。对此本文采用信息素挥发浓度自适应调节法[11],动态调整信息素浓度;且采用平滑算子,通过增加具有低强度信息素轨迹量的个体选择概率增进有效搜索,即有:

式中:Xi为第i 只蚂蚁的位置;Xext为信息素浓度最高蚂蚁个体的位置;dmax为信息素浓度最高的蚂蚁个体距其余所有蚂蚁个体距离的最大值;δ ∈(0,1);τi,分别为平滑前、后的信息素轨迹量。
对细菌觅食算法中的趋化(翻转与游动)算子进行修正,采取高斯变异,即在当前细菌个体Xi=( x1, x2,⋅⋅⋅,xm)加上一个服从高斯分布的随机扰动项,即

式中,N(0,1)服从均值为0,均方差为1 的高斯分布。
由式(8)可知,控制器参数c1,k 未知,这2 个参数的取值相互关联,影响系统的过渡过程动态特性。为得到较好的动态响应,本文采用自适应蚁群-细菌觅食算法对上述参数进行迭代寻优。为获取满意的动态特性,采用误差绝对值时间积分性能指标(ITAE)作为参数选择的目标函数,即:
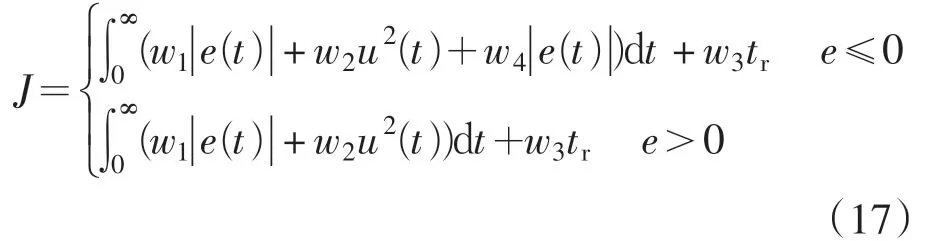
式中:w1,w2,w3,w4为各项加权值。
选取微分控制器参数η=0.35,积分滑模面参数c1∈[0,500],k ∈[0,100],经迭代100 次得优化后的参数为c1=437.165,k=77.291。取设计参数h=600。
3 实验结果及分析
对内埋式PMSM 无速度传感器系统采用旋转高频电压注入法结合ACA-BFA优化的自适应模糊微分积分滑模控制器进行实验研究。无速度传感器控制系统结构如图1所示。
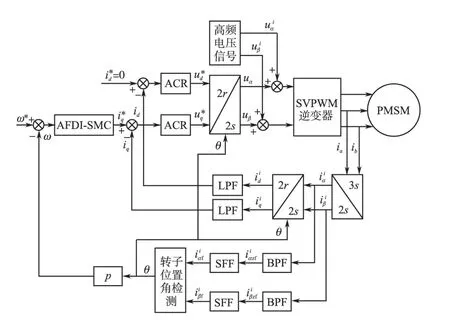
图1 无速度传感器AFDI-SMC系统结构图Fig.1 The system of speed sensor-less AFDI-SMC
采用id=0 矢量控制法,逆变器输出电压采用SVPWM 调制技术,所选内埋式PMSM 参数为:额定转速2 000 r/min,额定电流5.0 A,额定电压220 V,额定转矩4.0 N·m,定子各相电阻2.36 Ω,d轴电感0.004 8 H,q轴电感0.013 4 H,极对数2,转动惯量0.82×10-3kg·m2,永磁磁链0.107 3 Wb。选择逆变器开关频率为10 kHz,采样频率为20 kHz,高频电压频率为1 kHz,幅值为基波幅值的0.1倍。低通滤波器的通带和阻带截止频率分别设定为1 Hz和10 Hz;带通滤波器的通带上、下限截止频率分别为1 100 Hz和900 Hz;带阻滤波器的通带上、下限截止频率分别为1 980 Hz和 1 020 Hz。
为验证基于ACA-BFA融合算法优化并结合旋转高频电压注入法的自适应模糊微分积分滑模在PMSM无速度传感器控制中的理论有效性,分别进行PMSM高、低速加载状态转子速度及位置估计实验。图2、图3 分别为PMSM 在高速(2 000 r/min)、低速(50 r/min)运行时转子的速度和位置估计图。PMSM高速运行时加载15 N·m,低速运行时加载10 N·m。由图2b 可知,PMSM高速(2 000 r/min)运行时,转速误差在零值附近波动,最大转速降落为60 r/min,相对误差仅为3%。图2d中,转子位置误差存在尖峰现象,跳变产生的最大误差为10°(电角度)合5°(机械角度),稳定后最大误差为4°(电角度)合2°(机械角度)。
由图3b可知,PMSM低速(50 r/min)运行时,最大转速降落为8 r/min,相对误差增至16%,其主要原因在于PMSM 低速运行时反电势较小且不对称,次要原因在于AD转换、编码和滤波精度较低。图3d 中,转子位置误差仍存在尖峰现象,跳变产生的最大误差约为40°(电角度)合20°(机械角度),稳定后最大误差为5°(电角度)合2.5°(机械角度)。

图2 PMSM高速加载运行转速及电角度估计Fig.2 Estimated speed and position at loaded high speed of PMSM
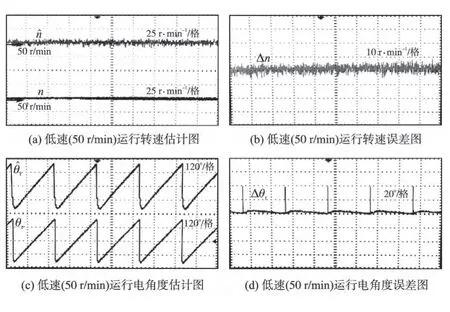
图3 PMSM低速加载运行转速及电角度估计Fig.3 Estimated speed and position at loaded low speed of PMSM
4 结论
本文结合蚁群-细菌觅食(ACA-BFA)融合算法设计了自适应模糊微分积分速度闭环滑模控制器,并采用基于旋转高频电压注入法的无速度传感器技术对PMSM 进行矢量控制。由实验结果知,PMSM 自适应模糊滑模控制系统在高、低速加载运行时响应快速且超调量小;转速降落及转子位置估计误差相对较小,有良好的动态特性和抗干扰特性;对于系统内部参数摄动及外部干扰等具有良好的自适应性及鲁棒性。
[1] Dutta R,Rahman M F.Design and Analysis of an Interior Permanent Magnet Machine with Very wide Constant Power Operation Range[J].IEEE Transactions on Energy Conversion,2008,23(1):25-33.
[2] Reigosa D D,Garcia P,Lorenz R D,et al.Measurement and Adaptive Decoupling of Cross-saturation Effects and Secondary Saliencies in Sensorless Controlled IPM Synchronous Machine[J].IEEE Transactions on Industry Applications,2008,44(6):1758-1767.
[3] 尚喆,赵荣祥,窦汝振.基于自适应滑模观测器的永磁同步电机无位置传感器控制研究[J].中国电机工程学报,2007,27(3):23-27.
[4] 刘英培,万健如,梁鹏飞.基于扩展卡尔曼滤波器和空间电压矢量调制的永磁同步电机直接转矩控制[J].中国电机工程学报,2009,29(27):67-74.
[5] 王庆龙,张崇巍,张兴.基于变结构模型参考自适应系统的永磁同步电机转速辨识[J].中国电机工程学报,2008,28(9):71-75.
[6] 赵信杰,李锐华,胡波,等.无速度传感器的永磁同步电机滑模控制[J].电机与控制应用,2012,39(1):22-25.
[7] 秦峰,贺益康,刘毅,等.两种高频信号注入法的无传感器运行研究[J].中国电机工程学报,2005,25(5):116-121.
[8] Chi Song,Zhang Zheng,Xu Longya.Sliding-mode Sensorless Control of Direct-drive PM Synchronous Motors for Washing Machine Applications[J].IEEE Transactions on Industry Applications,2009,45(2):582-590.
[9] 汪海波,周波,方斯琛.永磁同步电机调速系统的滑模控制[J].电工技术学报,2009,24(9):71-76.
[10]管成.非线性系统的滑模自适应控制及其在电液控制系统中的应用[D].杭州:浙江大学,2005.
[11]彭沛夫.遗传融合的自适应蚁群算法最优PID 控制研究[D].长沙:湖南大学,2005.
猜你喜欢
上海大中型电机(2021年2期)2021-07-21 03:01:32
防爆电机(2020年6期)2020-12-14 07:16:54
中国惯性技术学报(2019年6期)2019-03-04 09:50:06
测控技术(2018年4期)2018-11-25 09:47:26
测控技术(2018年3期)2018-11-25 09:45:40
筑路机械与施工机械化(2014年4期)2014-03-01 02:59:05
组合机床与自动化加工技术(2014年12期)2014-03-01 02:22:54
自动化博览(2014年9期)2014-02-28 22:33:17
自动化博览(2014年4期)2014-02-28 22:31:15
汽车电器(2014年8期)2014-02-28 12:14:29
