
基于驾驶员意图识别的液力机械式自动变速器换挡规律优化
2015-06-09 12:33吴光强
机械与电子 2015年8期
程 敏,吴光强,2,祝 胜
(1.同济大学汽车学院上海 201804;2.东京大学生产技术研究所,日本东京 153-8505)
基于驾驶员意图识别的液力机械式自动变速器换挡规律优化
程 敏1,吴光强1,2,祝 胜1
(1.同济大学汽车学院上海 201804;2.东京大学生产技术研究所,日本东京 153-8505)
0 引言
换档规律是指挡位随控制参数变化的规律。它关系到动力传动系统各总成与整车最优性能的发挥,直接影响换挡品质乃至车辆的动力性、燃油经济性、通过性及环境适应能力等[1]。换挡规律应结合驾驶员意图以及道路状况进行合理的修正[2],有助于消除频繁升降挡现象,提高燃油经济性。因此,只有准确辨识出驾驶员的当前意图,才能选择合适的换挡规律进行切换。
目前,国内外学者提出很多驾驶员意图识别的方法,参考文献[3]采用模糊控制和神经网络的方法,在优秀驾驶员操作辨识基础上建立基于经验的换挡规律,改善了车辆的性能;基于Bayes决策论的隐式马尔可夫模型(Hmm)具有处理时间序列数据的特性,且可以产生优异的分类性能[4],目前广泛应用于驾驶员意图识别[5-7]。
1 驾驶员意图分析
根据驾驶员的驾驶经验和实验数据,在平直路面上驾驶员意图可以分为急加速、加速、保持、减速、急减速5类,简写为HA,A,M,D,RD,每一类对应着不同的驾驶员操作,主要通过油门踏板开度、油门踏板变化趋势和制动踏板开度来体现。设平直路面上的驾驶意图类型为Sn(n=1,2,3,4,5),相邻采样时间内驾驶意图状态会发生概率性转移或保持不变,驾驶观测值类型为om(m=1,2,3),Sn和om之间的映射关系以概率值表征,根据驾驶意图和驾驶观测值之间的关系,以节点和网络关联模式构成的模型如图1,图中a,b表示发生的概率,i,j(i,j=n,i≠j)表示驾驶员意图类型。
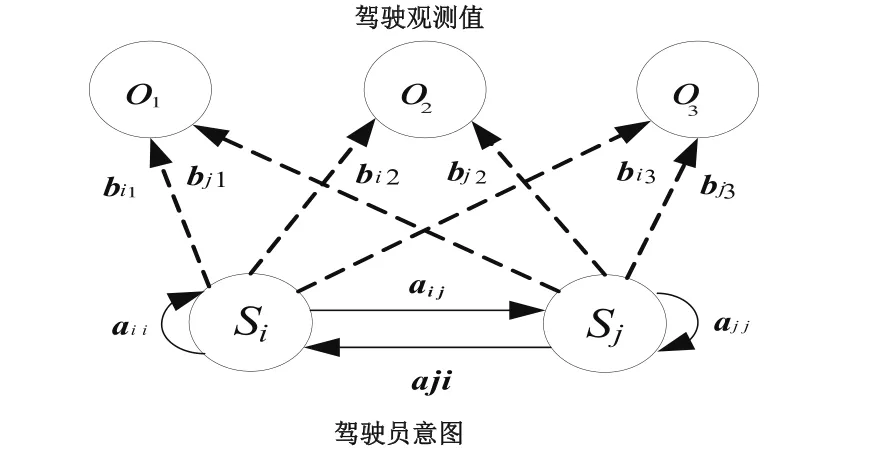
图1 驾驶意图与驾驶观测值关系模型
2 隐马尔可夫建模与验证
2.1 隐马尔可夫基本模型
隐马尔可夫模型Hmm(hidden Markov model)是一个双重随机过程[7],由此可见驾驶员意图和动作之间的联系与Hmm结构十分吻合。因此,采用Hmm构建驾驶员模型是可行的。
基于驾驶员每个动作即观测值采样的连续性,建立连续型隐马尔可夫模型,此处采用的Hmm模型参数可以描述为λ=[A,π,c,μ,U],设状态集合S={s1,s2,……,sn},则状态转移概率矩阵A={aij},aij=P(qi=Sj|qt-1=Si),初始状态概率分布π={πi},πi=P(q1=Si),观测值集合,o(t)={o1(t),o2(t),o3(t)},o1(t),o2(t),o3(t)分别表示油门踏板开度、油门踏板开度变化率、制动踏板开度,这里描述随机过程的高斯混合模型采用3个单高斯模型混合而成。观测值概率密度采用混合三维高斯概率密度函数,可以表示为:

cjk为状态sj的第k个单高斯模型加权系数,且;M为单高斯模型个数;N0(μjk,Ujk)为高斯密度函数;o为连续观测值向量;μjk和Ujk为第k个单高斯模型在状态sj下的期望向量和协方差矩阵,可由样本均值向量和协方差矩阵替代。
隐马尔可夫模型有3个基本问题:①评估问题;②解码问题;③学习问题。其中学习问题,即一个模型的训练过程,是首要解决的任务。通常采用Baum - Welch算法,对连续Hmm模型进行训练[8]。以下训练过程针对每一个驾驶员意图隐状态。
前向概率为:

对不同驾驶员意图进行学习与训练,直至式(4)的值收敛,得到由参数λ′=[A′,π′,c′,μ′,U′]确定的驾驶员意图模型。
2.3 模型验证
图2所示为Hmm模型辨识驾驶员意图的过程,按照指定步长依次将处理后的油门踏板开度α、油门踏板开度变化率˙α以及制动踏板开度β信号数据,输入到训练好的Hmm模型组λ′j=[A′j,π′j,c′j,μ′j,U′j],图中Sj表示某一驾驶意图的Hmm子模型,根据式(4)分别计算子模型的极大似然对数值,比较后选择最大者作为驾驶员当前的意图。

图2 Hmm辨识过程
为了验证连续型Hmm模型的准确性,采用一长段观测值数据如图3进行辨识,将数据分别导入训练好的5种Hmm子模型,计算其极大似然概率的对数值并比较,辨识的结果如图4所示。

图3 驾驶员操作数据

图4 辨识结果
由图4可得驾驶员意图是保持—急加速—保持—减速—保持。经过比较,按0.1 s截取驾驶员的操作数据可以提高辨识精度。对应单个驾驶员意图的多个样本连续测试,统计表明其测试精度。通过多次辨识的结果分析,辨识精度可达99.74。
随着我国国民经济的快速发展,城市人口的急剧增多,城市化的发展进程大大加快,为建筑行业的发展提供了前所未有的发展机会。建筑企业要重视建筑工程施工质量,做好建筑工程的结构设计,以提高自身的市场竞争力,增加建筑企业的经济效益与社会影响力。结构设计属于建筑工程极为关键的一个环节,严重影响建筑工程的整体质量,因此需以结构安全性、稳定性出发进行合理设计,并科学评估建筑工程的结构设计,以保障建筑工程的使用安全性与使用寿命。
3 基于驾驶员意图的换挡规律优化
3.1 基本换挡规律
基本换挡规律是在车辆处于平直良好路面上,发动机稳态运转的情况下进行的,包括最佳动力性换挡规律和最佳经济性换挡规律,以某5挡实验车辆参数为依据,通过换挡规律计算[11]以及车辆的实验得出换挡规律对比后采用组合型降挡规律,得到换挡规律如图5、图6所示。
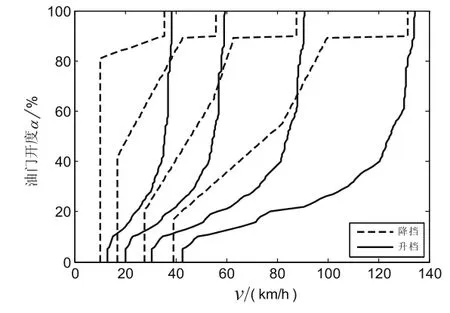
图5 最佳动力性换挡规律

图6 最佳经济性换挡规律
3.2 驾驶员意图与换挡规律的关系
在实际行驶过程中,驾驶员的期望加速特性是不断变化的,不可能依靠一种不变的换挡策略来满足所有的驾驶意图,换挡规律需要根据驾驶员的意图变化而变化,不同意图下的挡位操作如表1所示

表1 不同意图下的挡位操作_
在加速意图和急加速意图应依照最佳动力性换挡规律进行优化,减速意图和急减速意图应依照最佳经济性换挡规律进行优化。这里以急加速意图与急减速意图换挡规律优化为例。
3.3 急加速意图换挡规律优化
急加速意图下油门踏板开度突然增至大油门,有前述可知应提前降挡,延迟升挡,故需对最佳动力性换挡规律进行优化,提高升挡车速,降低降挡车速。这里采用收敛型降挡规律,在快速增大油门开度时,满足提前降挡,延迟升挡的要求,优化后的换挡策略如图7所示。

图7 急加速意图下换挡规律
3.4 急减速意图换挡规律优化
急减速意图下油门踏板突然减至小油门或油门踏板突然松开,有前述可知应适时降挡,禁止升挡,故需对最佳经济性换挡规律进行优化。如图8所示,a- b- c过程代表了突然急减速的驾驶员意图过程。
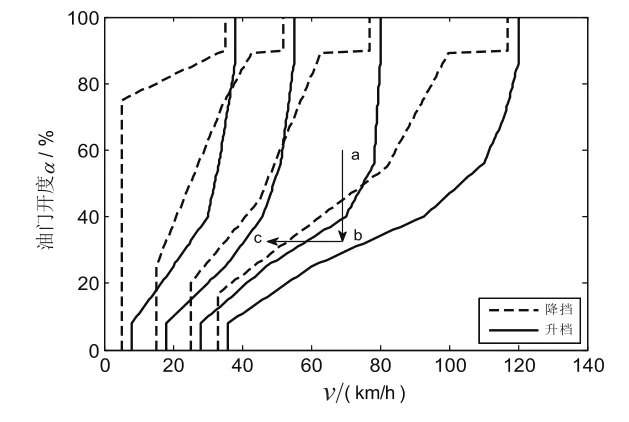
图8 急减速频繁换挡示意
由图8可知,a处突然急剧减小油门开度变化至b点,车辆从3挡升至4挡,显然与驾驶员减速意图相违背,于此同时车速继续降低,降低至c点时车辆从4挡降回3挡。故车辆产生了意外换挡现象,其直接原因是车辆惯性较大,车速不能立刻响应油门的突变,使得在急减速时产生于驾驶员截然相反的换挡过程。
针对车辆意外换挡现象的消除,大致分为3种:①通过设置换挡延迟时间来屏蔽换挡指令,等待车速的上升或下降[11];②采用油门钝化方法,即用步进的方式对油门信号进行处理,屏蔽短时间内油门的剧烈变换[12];③根据不同油门开度变化使用不同升挡和降挡规律修正因子,对升降挡临界车速进行修正[1314]。
减速意图属于平缓踩下制动踏板情况,故在此只考虑急减速意图下产生的意外换挡情况。由前述可知,驾驶员意图可由连续型隐马尔可夫模型得出,故采用第1种方法消除频繁换挡现象最为高效。
4 仿真分析
根据搭建的Matlab/Simulink车辆模型,对2种驾驶意图进行辨识后,通过换挡逻辑进行切换相应优化后换挡规律,得出优化前后车辆换挡仿真结果。
4.1 急加速意图下的仿真分析
采用如图9a所示的油门开度,汽车先以14%的油门开度缓慢加速,10~11 s时间内,加速到90%油门开度,11~30 s内保持其开度。在Hmm模型辨识出驾驶员意图为急加速后,如图9b,系统自动切换到急加速意图下的换挡策略,由于急加速意图时间较短,故在实际中若无减速意图,则采用急加速意图下的换挡规律直至升到最大挡位。仿真结果如图10所示,当油门突然增大时,优化后的换挡规律使车辆提前0.88 s降到2挡,延迟0.44 s升至3挡,延迟0.68 s升至4挡,延迟0.6 s升至5挡,符合该意图下的换挡要求,优化后的车速要高于优化前的车速。
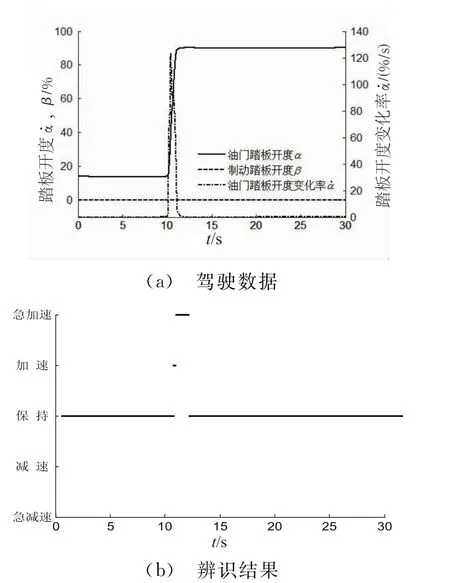
图9 急加速时驾驶数据以及辨识结果
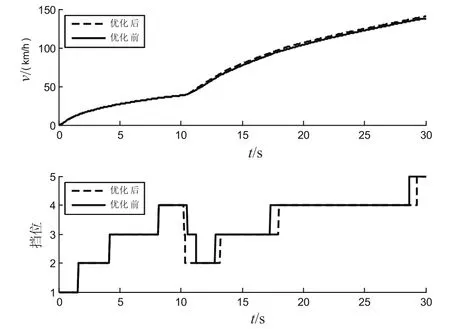
图10 急加速意图下仿真结果
4.2 急减速意图下的仿真分析
采用如图11a所示的油门开度和制动开度,汽车先以60%的油门开度加速,10~11 s时间内,油门快速松开,12~30 s内踩下制动踏板并保持。Hmm模型辨识结果如图11 b所示,驾驶员意图在10 s后为急减速,系统自动切换到急减速意图下的换挡策略,换挡延迟3 s,防止其升挡。仿真结果如图12所示,当油门突然减小时,优化后的换挡规律使车辆保持原有挡位即4挡直至降挡,符合该意图下的换挡要求,优化后比优化前减速较快。

图11 急减速时驾驶数据以及辨识结果

图12 急减速意图下的仿真结果
5 结束语
建立连续型隐马尔可夫驾驶员模型,应用从实车采集的数据。对模型进行训练与学习。通过对驾驶员操作行为的辨识,实现辨识驾驶员意图的目的,由结果可知,该方法有良好的准确性。
基于辨识出的驾驶员意图,对换挡规律进行优化。主要列出急加速与急减速意图下换挡规律的优化。由仿真结果可知,优化后的换挡规律满足挡位变换的要求,急加速意图下能够提前降挡,延迟升挡,急减速意图下能够消除意外升挡的现象。
[1] 吴光强,孙贤安.汽车自动变速器发展综述.同济大学学报(自然科学版),2010,38(10):1478- 1483.
[2] 孙贤安,吴光强,姜超,等.人 车 路闭环系统中的双离合器式自动变速器车辆换挡规律[J].汽车技术,2014(7):18- 23.
[3] Hayashi K,Shimizu Y,Dote Y,et al.Neuro fuzzy transmission control for automobile with variable loads[J].Control Systems Technology,IEEE Transactions on Control Systems Technology,1995,3(1):49- 53.
[4] 刘成林,谭铁牛.模式识别研究进展[J].中国计算机学会通讯,2007.3(12):38- 46
[5] Gadepally V,Krishnamurthy A,Ozguner U.A Framework for Estimating Driver Decisions Near Intersections[J].IEEE Transactions on Control Systems Technology,2014.15(2):637- 647.
[6] He L,Zong C,Wang C.Driving intention recognition and behaviour prediction based on a double- layer hidden Markov model[J].Journal of Zhejiang University SCIENCE C,2012,13(3):208- 217.
[7] 王志堂,蔡淋波.隐马尔可夫模型(Hmm)及其应用[J].湖南科技学院学报,2009,30(4):42- 44.
[8] Baum L E,Petrie T.Statistical inference for probabilistic functions of finite state Markov chains[J].The annals of mathematical statistics,1966,37(6):1554 -1563.
[9] 万建伟,杨俊岭.基于CHmm的雷达海面回波建模与分析方法[J].电子与信息学报,2007,29:2715 -2719.
[10] 黄英,石献磊,徐世利,等.基于动力性和经济性的轿车换挡规律设计与试验研究[J].汽车技术,2005(11):28- 33.
[11] 何忠波,白鸿柏,杨建春.AMT车辆频繁换挡的消除策略[J].农业机械学报,2006,37(7):9- 13.
[12] 王洪亮,刘海鸥,张威,等.越野车辆AMT消除意外换挡及频繁换挡策略研究[J].北京理工大学学报,2009(8):681- 685.
[13] 肖文颖.基于模型的自动变速器换挡策略优化方法[J].汽车技术,2014(5):30- 34.
[14] 杨伟斌,陈全世,吴光强,等.智能修正型换挡规律的设计及在双离合器式自动变速器中的应用[J].机械工程学报,2009,45(1):205- 210.
Optimization of Shift Schedule for Automatic Transmission Based on Driver Intention Recognition
CHENG Min1,WU Guangqiang1,2,ZHU Sheng1
(1.Automotive School,Tongji University,Shanghai 201804,China;2.Institute of Industrial Science,University of Tokyo,Tokyo 153- 8505,Japan)
构建了基于隐马尔可夫模型的驾驶员意图模型,用于辨识不同的驾驶意图。以油门踏板开度以及制动踏板开度等作为输入数据,结合Baum-Welch算法训练驾驶员意图模型,以计算所得新数据的极大似然值作为辨识结果,验证了驾驶员意图模型的准确性。根据识别出的驾驶员意图模型参数,基于基本换挡规律,对不同意图下的换挡规律进行优化。仿真结果表明,优化后的换挡规律更符合驾驶员期望的挡位操作,且有助于消除意外换挡的现象,验证了意图模型优化的有效性。
驾驶员意图;换挡规律;隐马尔可夫模型;高斯混合模型
A driver intention model is described based on the hidden Markov model,which is used to identify a driver’s intentions.The model is trained with Baum- Welch algorithm and data on the degree of opening of accelerator pedal and the brake pedal is inputted;thereafter the maximum likelihood value is calculated as recognition results,which verify the accuracy of the model.On the basis of basic shift schedule and the identified driver intention,the shift schedule was optimized under different intentions.The simulation results show that the optimized shift schedule is more in accordance with the driver’s intended action,and helps eliminate accidental shift phenomenon,which verifies the effectiveness of the optimization.
driver Intention;shift schedule;hidden Markov model;Gaussian mixture model
U463.22
A
1001- 2257(2015)08- 0059- 05
程 敏,(1991-)女,安徽黄山人,硕士研究生。研究方向为人-车-路智能控制;吴光强 (1965-),男,河北秦皇岛人,教授,博士研究生导师,研究方向为自动变速传动控制系统与仿真等,汽车多体系统动力学与非线性控制等;祝 胜(1990-),男,浙江衢州人,硕士研究生,研究方向为汽车换挡过程控制。
2015- 03- 20
猜你喜欢
车主之友(2022年6期)2023-01-30
岷峨诗稿(2020年4期)2020-11-18
黄河之声(2019年23期)2019-12-17
汽车实用技术(2019年17期)2019-09-21
汽车电器(2018年8期)2018-08-25
黄河之声(2017年13期)2017-01-28
数学理论与应用(2016年3期)2016-05-17
核科学与工程(2015年3期)2015-09-26
哈尔滨师范大学自然科学学报(2015年1期)2015-04-19
电视技术(2014年19期)2014-03-11
