基于μC/OS-Ⅱ的机车DCU模拟板设计
2015-06-07 11:14耿红伟黎步银
仪表技术与传感器 2015年10期
耿红伟,黎步银
(华中科技大学光学与电子信息学院,湖北武汉 430074)
基于μC/OS-Ⅱ的机车DCU模拟板设计
耿红伟,黎步银
(华中科技大学光学与电子信息学院,湖北武汉 430074)
针对韶山3型(SS3B)货运列车机车传动控制单元(DCU)模拟板存在的问题,从一定通用性、高稳定性、高性能3个方面出发,采用模块化的方法,提出了一种基于飞思卡尔平台的硬件和软件解决方案。系统硬件采用冗余电路设计,滤波设计,给出了硬件原理图。系统软件移植了实时操作系统μC/OS-Ⅱ,在此基础上编写了应用软件和新的滤波算法。多层设计的硬件结构,可靠的主控芯片以及实时操作系统,提高了系统运行的稳定性和实时性。实验调试表明各项功能符合设计要求。
传动控制单元;冗余;飞思卡尔;实时操作系统;可靠性
0 引言
2003年铁道部计划对列车控制系统采用模拟控制方式的韶山3B(SS3B)货运列车进行技术改造,实行固定重联,SS3B实行固定重联时是采用如SS4B、SS8、SS9等车型较成熟的微机控制方式,并实现网络化控制,传动控制单元(DCU)作为列车微机网络控制系统的重要组成部分,主要负责列车的牵引,制动,故障检测等功能。改造后的系统仍存在以下缺陷:
(1)核心芯片运算能力的限制以及线路过长导致信息交换运算时间长;
(2)抗电磁干扰的能力差;
(3)夏季,由于机械间温度过高,DCU散热不良,极易发生网络故障。
另外,多种核心元器件现已经停产,生产釆购、维修极为困难,对机车检修及维护带来了诸多不便。
因此设计一款具有一定通用性、高稳定性、高性能的DCU模拟板,不仅能提高机车DCU的工作性能,还能提高我国货运列车中占多数的电力机车的使用年限,对我国铁路事业以及经济发展具有明显的现实意义。
1 硬件设计
SS3B货运列车的DCU采用多板分模块的方式组成[1],DCU综合控制柜一般由综合控制板、模拟量处理板、数字量处理板、脉冲处理板等单元组成,除了综合控制板,其他处理板核心芯片相同。其中模拟板主要完成如下几个功能:
(1)对传感器送来的电流、电压信号进行采样,A/D转化处理后经CAN总线送给DCU主控板。
(2)将从微机接收到的控制信号D/A转化,处理后送给电制动记录仪实现列车制动。
(3)收到过压或者欠压信号经处理后,设置相应的故障代码,根据故障代码内容点亮或熄灭LED指示灯。
根据系统功能,可以将硬件划分为单片机电路、BDM下载电路、A/D采样输入电路、冗余A/D采样输入电路、D/A转换电路、CAN通信驱动电路、LED显示电路。系统的硬件电路框图如图1。整个硬件系统采用多点接地,多层板的电路设计以及模拟量、数字量分开按信号流向来布局,采用统一的航空接插件,有效保证电路板的抗电磁干扰能力。
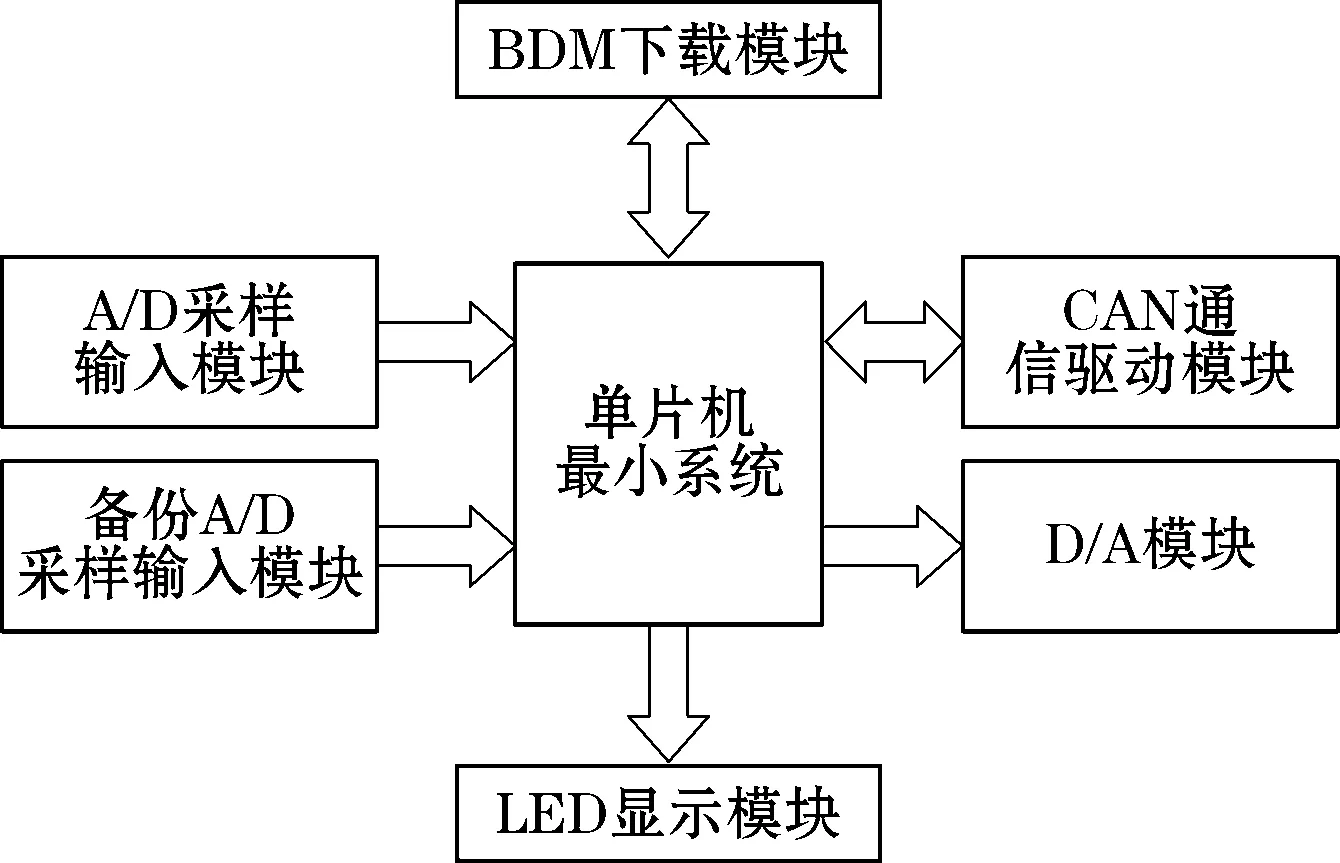
图1 系统的硬件电路框图
1.1 单片机电路设计
系统主控芯片采用MC9S12X系列芯片,由于其内置了CAN模块,所以无需外扩CAN控制器,精简了电路,系统集成度提高了。单片机电路主要由单片机模式配置电路、单片机最小系统、A/D采样基准电压电路、看门狗电路、串口电路组成。主控电路框图如图2。由于机车DCU运行在一个复杂的电磁环境并且高温高湿,所以单片机最小系统中采用一个16 MHz的有源晶振,有源晶振的高稳定性减少了单片机跑飞的几率,另外飞思卡尔单片机内部带有锁相环,因此单片机能够获得高达40 MHz的总线频率,这对DCU模拟板运行的高效性和实时性提供了保障。看门狗电路提供单片机复位功能,同时也能接收DCU主控板的复位信号,必要时强制单片机复位,为整个系统提供安全保障。将这一部分电路设计成核心板,以及后面移植的实时操作系统,可以运用到DCU其他子板中,有效地减少了设计周期,具有一定的通用性。

图2 主控电路框图
1.2 A/D采样输入电路设计
A/D模块电路主要完成传感器传来的模拟信号的滤波并送主控单元处理,由于机车模拟信号有电压信号及电流信号,统一经I-V变化为电压信号。为了提高采样的准确性和稳定性,增加了一个简单的有源滤波电路来滤波和隔离。设计的电路如图3。备份A/D电路模块也是采用图3的电路。放大器采用TL082,M1和M2为磁珠,C1为一个1 000 pF/3 kV的独石电容,有效滤除杂波干扰。D1为限压二极管,防止输入过大烧坏单片机。

图3 A/D采样输入电路
1.3 D/A模块电路设计
单片机接收来自DCU综合控制板的数字信号后,经TL5628串行输入并行输出D/A芯片转换后输出6路模拟信号,其中有3路信号是备份冗余。为了提高输出信号的带负载能力,经过D/A芯片转化后的模拟量又通过了两级放大送给电制动仪。电路如图4。因为实际的放大器存在着失调电压,为了减少失调电压的影响,确保输出送给电制动仪的信号准确性,采用减少放大器的增益到一个合理的值同时级联放大组件的方案,虽然成本增加了,但失调很容易控制,同时带宽也会提高。

图4 D/A模块电路
1.4 CAN驱动电路设计
CAN电路采用82C250芯片,同时使用光耦芯片将单片机引脚与外界进行隔离,提高抗干扰能力,电路如图5。另外,电路中增加两个测试孔,方便以后测试CAN通信线路是否正常以及调试。
1.5 BDM下载电路设计
背景调试模式(BDM)是一种直接基于硬件的OCD(ON CHIP DEBUGGING)调试手段,它仅占用一个I/O,所有的命令和参数通过一个专用引脚传输,不占用MCU其他资源。BDM模块具有以下功能:应用程序的擦除与下载、实现应用程序态调试、配置与修复单片机内部资源、对应用程序做加密。电路如图6。相比以前的DCU模拟板主控芯片80C196紫外线擦除下载模式,BDM更具有易用性,可靠性,安全性优势。
2 系统软件设计
μC/OS-Ⅱ作为一款免费高效的实时操作系统内核[2],其已经通过了非常严格的测试,并得到了美国航空管理局的认证。另外,μC/OS-Ⅱ源码公开,便于移植和维护。
2.1 任务设计与实现
因为在嵌入式系统中只有一个CPU,所以在一个具体的时刻只能允许一个任务占用CPU。μC/OS-Ⅱ内核根据任务优先级来进行调度[3-4],所以任务存在5种状态:睡眠态、就绪态、等待态、中断服务态和运行态。μC/OS-Ⅱ要在主控芯片上运行,必须进行移植。移植完成后,根据系统的功能,进行了任务划分如图7。

图5 CAN驱动电路

图6 BDM下载电路

图7 系统任务关系图
(1)开始任务:完成硬件的初始化以及创建第一个任务,优先级最高。
(2)D/A任务:通过CAN总线接收来自主机的信号,经过单片机处理送给D/A芯片进行转化,根据任务的重要性以及快捷性,D/A任务的优先级是除开始任务后其他任务当中最高的。
(3)A/D任务:将传感器传来的模拟量转化为数字量并通过CAN总线发送给主机。优先级仅次于D/A任务。
(4)网压任务:接收主机发来的信号,判断过压还是欠压,并生成故障码点亮LED。优先级最低。
A/D任务是列车获取外界信息的重要渠道,现主要说明。列车传感器输出的信号经过硬件有源滤波隔离处理后送入MCU,考虑到抗干扰的情况,采样时将采样位数设置为8位,在精度满足的情况下,提高了噪声门限。采样后的A/D信号需经过再次数字滤波才能发送给DCU主控板。一般数字滤波技术有算数平均值滤波、滑动平均值滤波、IIR滤波等算法。这些算法都存在着一些处理数据量大、实时性不够、抗干扰能力差等缺陷。因此综合硬件情况和系统运行环境,本文借鉴滑动滤波的算法采用一种新的滤波算法。即首先建一个N个数据空间的队列,排序后去掉最大最小值然后取平均值。每进来一个新的数据后,将原数据的头数据去掉,再依次进行排序掐头去尾取均值。改进后滤波算法如图8所示。

图8 新滤波算法流程图
2.2 系统运行与功能测试
系统上电后操作系统初始化,然后创建第一个任务即启动任务StartTask,在第一个任务中硬件初始化,包括锁相环模块、实时中断、ATD模块、CAN模块等。并且创建了其他3个任务,最后运行OSStart,将CPU的使用权交给操作系统,操作系统根据任务的优先级进行任务的调度和运行。由于条件的限制,模拟板没有上列车做联调,只是进行了板级功能测试,由于单片机有2个CAN模块,测试采用输入0~5 V模拟信号经A/D转换后用单片机CAN模块1送CAN模块2,最后经串口送到电脑。这样就测试了A/D功能、CAN模块的发送和接收功能。测试结果如图9所示。结果表明,在实验室环境下,A/D采样转换,CAN通信功能正常运行。
3 结束语
系统采用冗余、模块化的思想,采用主流汽车级的控制芯片,精简电路,多层板设计,移植了实时操作系统,软件可扩展性强,实现了DCU模拟板高性能,高可靠性以及核心板的通用性。可用于传统货运列车的DCU升级与改造,截至目前在武汉征原电气有限公司投入使用。
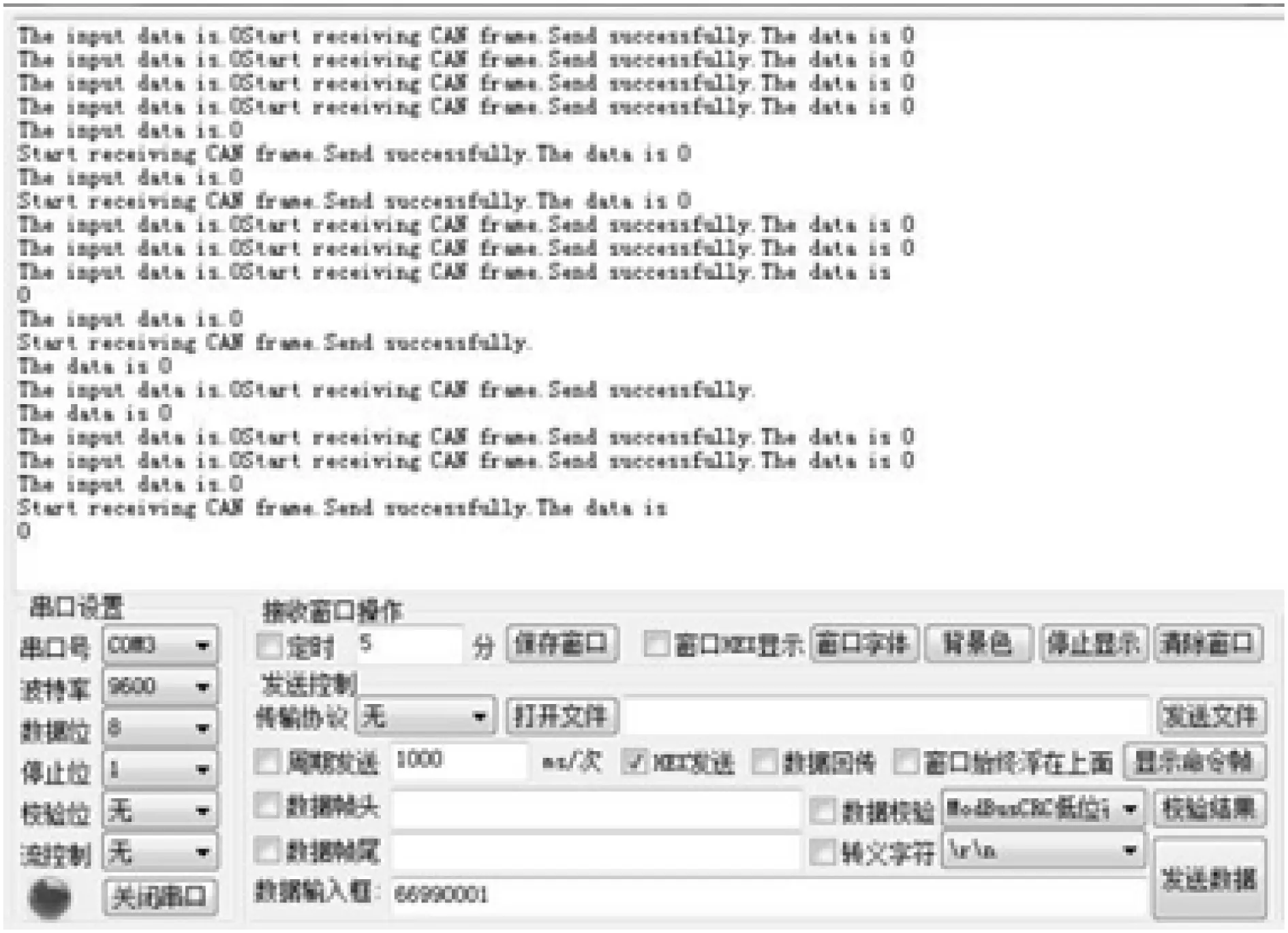
图9 测试结果
[1] 路向阳,张元林,郑锡芳.SS3B固定重联机车网络控制系统.机车电传动,2003(1):7-9.
[2] 任哲.嵌入式实时操作系统μC /OS-Ⅱ原理及应用.北京:北京航空航天大学出版社,2005.
[3] 周慈航.基于嵌入式实时操作系统的程序设计技术.2版.北京:北京航空航天大学出版社,2011.
[4] 邵贝贝.嵌入式系统中的双核技术.北京:北京航空航天大学出版社,2008.
作者简介:耿红伟(1989— ),硕士,主要从事嵌入式系统开发等方面的研究。E-mail:ghw922@sohu.com
Locomotive DCU Board Design and Development Based on μC/OS-II
GENG Hong-wei,LI Bu-yin
(School of Optical and Electronic Information,Huazhong University of Science and Technology,Wuhan 430074,China)
In view of problems existing in the SS3B locomotive drive control unit (DCU),from the aspects of a certain versatility,high stability and high performance,the modularization method was adopted,and the hardware and software platform solutions based on Freescale was proposed.System redundancy and filter design were used for hardware circuit design,and hardware principle diagram was presented.System software transplanted the real-time operating system ?C/OS-II and application software and new filtering algorithm was written.Multilayer hardware structure,reliable master control chip and real-time operating system improved system operation stability and real-time performance.The experimental debugging shows that functions meet the design requirements.
DCU;redundancy;Freescale;RTOS;reliability
顾宇(1978- ),副研究员,工学硕士,主要研究领域:智能传感器信号处理。E-mail:guted@ustc.edu.cn 叶寒生(1981- ),工程师,工学硕士,主要研究领域:工业自动化流量仪表信号处理方法与系统。 E-mail:yehsheng@mail.ustc.edu.cn
2014-12-29 收修改稿日期:2015-07-18
TP273;U262.7
A
1002-1841(2015)10-0043-03
猜你喜欢
电子制作(2019年22期)2020-01-14
电子制作(2019年13期)2020-01-14
电子制作(2019年13期)2020-01-14
电子制作(2019年16期)2019-09-27
电子制作(2019年15期)2019-08-27
电子制作(2019年11期)2019-07-04
电子制作(2019年9期)2019-05-30
电子制作(2019年23期)2019-02-23
电子制作(2018年16期)2018-09-26
火控雷达技术(2016年3期)2016-02-06