基于转角差法的扭矩传感器设计
2015-06-07 11:14逄金鑫潘海林王江涛唐光德赵振杰
仪表技术与传感器 2015年10期
逄金鑫,潘海林,,张 清,王江涛,唐光德,赵振杰
(1.纳光电集成与先进装备教育部工程研究中心,上海 200062;2.国家可信嵌入式软件工程技术研究中心,上海 200062)
基于转角差法的扭矩传感器设计
逄金鑫1,潘海林1,2,张 清2,王江涛2,唐光德2,赵振杰1
(1.纳光电集成与先进装备教育部工程研究中心,上海 200062;2.国家可信嵌入式软件工程技术研究中心,上海 200062)
为满足汽车传感器集成化、智能化的需要,解决接触式扭矩传感器的不足之处,设计了一种非接触式扭矩传感器,为汽车电动助力转向系统(Electric Power Steering,EPS)提供扭矩信号。扭矩测量采用差角的方法,利用巨磁阻角度传感器芯片获得角度数据,微控制器对角度数据计算处理后通过控制器局域网络(Controller Area Network,CAN)接口输出扭矩信号。该传感器具有无机械磨损、线性度高、性能稳定等特点,并且可以方便地实现绝对角度测量的功能。实验测量表明,该传感器表现出良好的线性特性。
非接触式;扭矩传感器;转角差法;角度传感器;冗余设计
0 引言
扭矩传感器作为汽车EPS(电动助力转向系统)中的信号源,其性能优劣会直接影响ECU(电子控制单元)的运算结果,进而会影响助力电机的响应准确性,因此其在EPS当中扮演着十分重要的角色。目前,电位计型、接触式传感器仍在广泛使用[1]。这种传感器结构复杂、容易磨损、稳定性较差[2]。基于磁性测量原理的非接触式扭矩传感器主要有霍尔式、电磁感应式和磁阻/巨磁阻式等[3-4],除此之外,也有基于磁弹性效应的扭矩传感器[5]。为更好地满足汽车EPS系统对扭矩信号的需求,研究了基于转角差法获取扭矩的方法,采用非接触式GMR角度测量芯片,设计了传感器系统的硬件电路和软件程序。该传感器具有安装方便、无需机械调零、无机械磨损、性能稳定等特点。未来汽车传感器的发展趋势是集成化设计以及可以通过汽车网络如CAN进行通讯[6],所研究和设计的扭矩传感器可以方便的集成到复合式传感器当中,实现扭矩和转角同时输出的功能,并通过CAN接口接入汽车网络当中。
1 测量原理
在转向盘的转向输入轴和转向输出轴之间加一扭杆,将转向盘的扭矩传递到扭杆上,通过测量扭杆的扭矩来获得转向盘的扭矩。由力学知识可得扭杆的扭矩T的计算公式:
(1)
式中:G为扭杆的剪切弹性模量;Ip为扭杆的极惯性矩;l为扭杆的长度;θ为扭杆的扭转角。
G、Ip、l为常数,可知扭矩与扭转角成正比。
从安全性的角度考虑,对扭矩测量加入冗余设计[8],同时测量并输出2路扭矩数据。
2 扭矩计算推导
如图1所示,扭杆上端和下端各连接有1个大齿轮,2个大齿轮的参数一致,齿数为n。2个大齿轮均与2个小齿轮啮合,小齿轮齿数分别为n1和n2。齿数为n1的一组齿轮和齿数为n2的一组齿轮各自独立测量角度和计算扭矩数据。

图1 测量原理图
齿轮1和齿轮4与大齿轮之间的传动比N1=n/n1;齿轮2和齿轮3与大齿轮之间的传动比N2=n/n2。设齿轮1和齿轮4的初始角度分别为φ10和φ40,转向盘转过一定角度后,齿轮1和齿轮4对应的角度变为φ11和φ41,计算转向盘的扭矩。
齿轮1转过的角度为φ11-φ10+C1×360°,齿轮4转过的角度为φ41-φ40+C4×360°。其中C1、C4为整数。扭杆实际形变的角度为两者之和。令Δφ1=φ11-φ10,Δφ4=φ41-φ40。考虑到齿轮1和齿轮4与大齿轮之间的传动比。则
N1×θ=Δφ1+Δφ4+(C1+C4)×360°
(2)
扭角的测量范围设定为-8°~8°,当N1<45时,齿轮1与齿轮4之间的角度差值不超过360°,故此时C1+C4的可能取值为-1,0,1。
关于C1+C4取值的判断,N1·θ的取值为-8°×N1~8°×N1,所以当Δφ1+Δφ4<-8°×N1时,C1+C4取1,当Δφ1+Δφ4>8°×N1时,C1+C4取-1,其他情况C1+C4取0。
3 硬件电路设计
3.1 主控制器选型
系统的主控制器为8位微控制器XC886,兼容标准8051处理器,工作频率高达24 MHz,具备乘/除法运算单元,具有2个CAN节点的MultiCAN模块[9]。
3.2 传感器芯片选型
传感器芯片采用基于GMR原理测量的角度传感器芯片TLE5012B[10],测量范围为0~360°,输出绝对角度值用15 bit数字信号表示[11]。
3.3 系统电路
系统框图如图2所示,硬件电路主要分成3个部分:数据采集部分、数据处理输出部分和数据存储部分。数据采集部分主要由TLE5012B传感器芯片完成。数据处理和输出部分由微控制器XC886完成。数据存储部分为外接的一片74LC02 E2PROM芯片,负责存储四颗磁钢的初始磁场方向。在初值测量阶段,四颗传感器芯片分别测量四颗磁钢的磁场方向,并将数据通过SSC(同步串行通信)接口传输给XC886。XC886使用GPIO(通用输入/输出)接口模拟I2C接口,将接收的数据处理后存入E2PROM[12]。
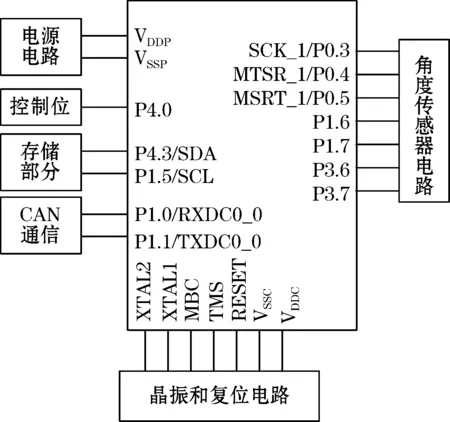
图2 硬件框图
4 系统软件设计
系统软件框图如图3所示,软件程序主要分为2个部分:初值存储部分和当前值测量部分。当引脚P4_0为高电平时,运行初值测量与存储程序,P4_0为低电平时,运行当前值测量与扭矩计算程序。四颗角度传感器芯片通过总线的方式与XC886相连,XC886采用动态扫描的方式依次获取4个角度传感器的数据。在初值存储部分,只需将4组数据存入E2PROM即可;在当前值测量部分,将获得的最新角度数据与读取的初始角度数据进行计算,获得扭矩数据,并通过CAN接口输出。

图3 软件框图
5 结果与讨论
装配好传感器后,设置好零位,开始扭转角的测量。使用步进电机控制转轴转动,设置步进电机步长为0.9°,测量每一步转动后的扭转角度值。厂方提供的扭杆K值为2 N·m/(°),与扭角值相乘可得扭矩值。根据传感器主要静态性能指标计算方法GBT_18459—2001,采用实际总平均特性的最佳拟合直线方法对测量数据进行分析。
图4、图5为两组齿轮同时测量的扭矩数据,分别输出为主路扭矩信号与辅路扭矩信号,两组数据互补。数据表明,扭矩传感器线性度很好。齿轮啮合波动是造成非线性的最主要因素,最大非线性度约为0.787%,重复性误差为0.110%;。通过降低传动过程中的齿轮啮合波动,可以进一步提高传感器的线性度。

图4 主路扭矩信号
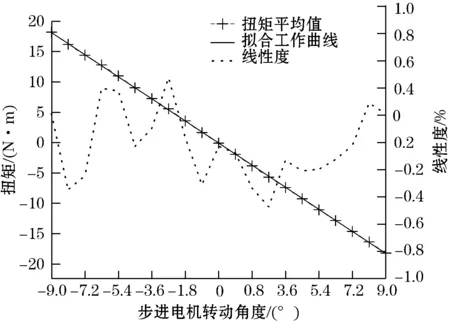
图5 辅路扭矩信号
传感器分辨率测量。设置步进电机转动范围为±9°,在转动过程中,传感器系统实时高速采集转动数据,然后通过CAN接口输出角度值,输入变化量以最小采集时间间隔为单位,图6为从扭转角8.1°~-8.1°转动时所连续采集获得的数据。横坐标为测量点,测量点之间间隔0.005 2°,纵坐标为CAN输出数据的十进制格式,间隔为0.011 0°。图6中的插图为整个过程中灵敏度最低的一段,在步进电机转动0.062 4°时输出才发生变化,可以得出分辨率为0.062 4°。

图6 连续采集扭矩输出数据
通过角度传感器的分辨率性能以及齿轮传动比计算得到扭矩传感器的理论分辨率为0.001 47°。实际测得的分辨率远大于此值,其原因主要有:一是齿轮啮合度不够,大齿轮转动时小齿轮未能即时传动;二是步进电机具有最小步长,其实际转动角度是离散的,整体转动近似是匀速运动,但如果细分到一个很小的时间间隔(小于最小步长的时间),其转动过程并非匀速,这也会对数据测量造成一定不良影响。因此,进一步从机械和测量装置进行改善,可以提高传感器的分辨率。
6 结束语
设计了一种非接触式扭矩传感器,采用冗余设计,结构简单,装配方便。通过实验测量了传感器的基本特性,两路扭矩信号具有良好的线性度,最大非线性度为0.787%,重复性误差为0.110%;连续采样测得分辨率为0.062 4°,低于理论分辨率,而提高分辨率,需要进一步改善所用机械结构和测量装置。该传感器采用CAN接口与汽车局域网通讯,且可以方便实现扭矩和绝对转角同时输出的功能,符合汽车传感器智能化和集成化的发展趋势。
[1] AKIRA N,KOSUKE Y,TOSHIRO Y,et al.Development of a steering angle and torque sensor of contact-type.Furukawa Review,2004,(25):36-41.
[2] SHI P J,ZHANG Q,LIN C,et al.Electric power steering system matching and Hardware-in-the-loop simulation of economical cars.Electrical Machines and Systems 2011 International Conference,Beijing,2011.
[3] ANGLEVIEL D,FRACHON D,MASSON G.Development of a contactless Hall effect torque sensor for Electric power steering.SAE 2006 World Congress & Exhibition,Detroit,2006.
[4] KOZAKI Y,HIROSE G,SEKIYA S,et al.Electric power steering (EPS).Motion & Control,1999(6):9-15.
[5] 文西芹,李纪明.基于磁弹性效应的电动转向轴用新型扭矩传感器.仪表技术与传感器,2011(1):5-8.
[6] MAREK J,TRAH H P,SUZUKI Y,et al.汽车传感器.左治江等,译.北京:化学工业出版社,2004:363-365.
[7] KIM J H,SONG J B.Control logic for an electric power steering system using assist motor.Mechatronics,2002,12(3):447-459.
[8] 赵燕,周斌.新型汽车转向传感器的研究与发展.中国仪器仪表,2003(8):4-6.
[9] TREUTLER C P O.Magnetic sensors for automotive application.Sensors and Actuators A,2001,91(6):2-6.
[10] Infineon Technologies AG.XC886/888CLMDataSheet[DB/OL].(2011-12-29)[2014-11-11].http://www.infineon.com/dgdl/Infineon-XC88XCLM-DS-v01_02-en.pdf;jsessionid=9656035646463D9FA2121D1E81E497D5?folderId=5546d4694909da4801490a0a451108b0&fileId=db3a304412b407950112b40c4a9e0afb&ack=t.
[11] Infineon Technologies AG.TLE5012B[DB/OL].(2014-02-01)[2014-11-11] .http://www.infineon.com/dgdl/Infineon-TLE5012B_Exxxx-DS-v02_00-en.pdf?folderId=5546d4694909da4801490a07012f053b&fileId=db3a304334fac4c601350f31c43c433f.
[12] 郭天祥.新概念51单片机C语言教程.北京:电子工业出版社,2009:178-184.
欢迎订阅 邮发代号:8-69 月刊 10元/期
《仪表技术与传感器》杂志
主要刊载内容:
传感器技术 仪器仪表
系统与应用 研究与开发
订阅:沈阳市大东区北海街242号(110043)
电话:024-88718630
网址:www.17sensor.com
E-mail:info@17sensor.com
Research and Design of Torque Sensor Based on Angle Difference Method
PANG Jin-xin1,PAN Hai-lin1,2,ZHANG Qing2,WANG Jiang-tao2,TANG Guang-de2,ZHAO Zhen-jie1
(1. Ministry of Education Nanophotonics& Advanced Instrument Engineering Research Center,Shanghai 200062,China;2.National Trusted Embedded Software Engineering Technology Research Center,Shanghai 200062,China)
In order to meet the integration and intelligence needs of automotive sensors and solve the disadvantage of contact torque sensors,a contactless torque sensor was developed,thus providing torque signals for automotive electric power steering system. Torque measurement was carried out by the method of steering angle difference,and angle values were measured by the GMR Angle Sensors,then the the torque value was figured out by micro controller unit and put out through Controller Area Network interface. The sensors could easily realize the function of measuring absolute angle values. The test result shows that the designed sensor has good linear properties.
contactless;torque sensor;angle difference;angle sensor;redundancy design
2014-11-20 收修改稿日期:2015-07-20
TP212
A
1002-1841(2015)10-0013-03
逄金鑫(1990—),硕士研究生,主要研究方向:汽车传感器。E-mail:pangjinxin@gmail.com 赵振杰(1970—),教授,主要研究方向:磁敏材料及应用。 E-mail:zjzhao@phy.ecnu.edu.cn
猜你喜欢
内燃机工程(2021年6期)2021-12-10
装备制造技术(2020年2期)2020-12-14
少儿科学周刊·少年版(2020年9期)2020-03-04
少儿科学周刊·少年版(2020年9期)2020-03-04
家庭影院技术(2018年9期)2018-11-02
制造技术与机床(2017年7期)2018-01-19
凿岩机械气动工具(2017年3期)2017-11-22
制造技术与机床(2017年3期)2017-06-23
自动化学报(2017年5期)2017-05-14
自动化学报(2017年5期)2017-05-14