一种转速遥测仪的数据采集与处理系统
2015-06-07 11:14刘全顺曾祥楷朱志雄
仪表技术与传感器 2015年10期
刘全顺,曾祥楷,朱志雄,陈 阳
(重庆理工大学光电信息学院,重庆 400054)
一种转速遥测仪的数据采集与处理系统
刘全顺,曾祥楷,朱志雄,陈 阳
(重庆理工大学光电信息学院,重庆 400054)
根据空间滤波转速遥测原理和数据处理方法,设计了转速遥测系统中的数据采集与处理系统,构建了一个转速遥测仪。用两个平行排列且相距一定距离的光电池阵列构成双空间滤波传感器,双空间滤波传感器输出两个与转速相关的准正弦信号S1和S2。每个准正弦信号通过波形变换转换为两个互补的矩形信号,用可编程计数器8254-2测量矩形信号的高电平脉宽,用高性能微处理器S3C2440采集矩形信号的脉宽计数值,根据矩形信号多个脉宽的平均值求出准正弦信号的中心频率。根据S1和S2的中心频率及其变化计算出旋转中心点位置,再根据旋转中心点位置和S1、S2的中心频率计算出旋转速度并显示。设计结果表明:该数据采集与处理系统能够实现转速遥测仪中多路相关数据的采集与处理。
空间滤波;旋转速度;中心频率;可编程计数器;ARM9微控制器
0 引言
旋转机械是一种普遍存在的机械结构形式,如各类加工机床的传动链、风力发电机等,旋转速度是确定这些旋转系统的工作状态和运动特性的重要参数之一。旋转速度的精确测量是机械检测技术的重要组成部分,在机械行业中有着极其广泛的应用。现有转速测量方法主要有光电编码[1]、磁电感应[2-4]、光栅[5]或光电反射式[6-7]等方法。磁电感应、光栅和光电编码型测量方法一般要求在被测体上同轴安装精密的测量基准分度盘。对精确设计的机械机构而言,附加的测量基准会改变原有的结构及其特性,影响其系统性能。而传统的光电反射式方法分辨率和精度较低。为克服上述缺点,根据双空间滤波转速遥测原理和数据处理方法,本文设计了一种转速遥测仪的多路数据采集与处理系统。
1 转速遥测原理
基于双空间滤波器的转速遥测系统结构如图1所示,其测量原理是:用一定强度的普通光源照射被测旋转体表面,旋转体表面的随机分布图像经放大倍数为M的光学系统成像到空间滤波器1和空间滤波器2(分别记为SF1和SF2)上,SF1和SF2具有同样的栅距P。SF1和SF2的输出光分别汇聚到光电探测器1和光电探测器2并输出电信号S1和S2。空间滤波器具有空间窄带通效应,故电信号S1和S2是其中心频率与旋转体转速成正比的准正弦信号。设被测体以转速ω旋转,其旋转中心O到SF1及SF2中心线在物平面上的共轭线的距离分别为R1和R2。根据空间滤波线速度测量原理[8]知,转速ω与信号S1和S2的中心频率f1及f2的关系为ωMR1=Pf1和ωMR2=Pf2。由几何光学可知,当旋转体旋转中心的成像点O′在SF1和SF2之间时,M(R1+R2)=L;当O′在SF1和SF2的同侧时,M|R1-R2|=L,L是SF1和SF2之间的距离。因此,可得转速ω为
ω=|f1±f2|P/L
(1)
由上述分析可知,在确定S1、S2的中心频率f1和f2以及旋转中心成像点O′的位置区域后,便可计算得到转速ω。该转速遥测值与旋转半径及成像系统放大倍数M无关,为瞬时转速的遥测提供了可能。

图1 基于双空间滤波器的转速遥测系统结构图
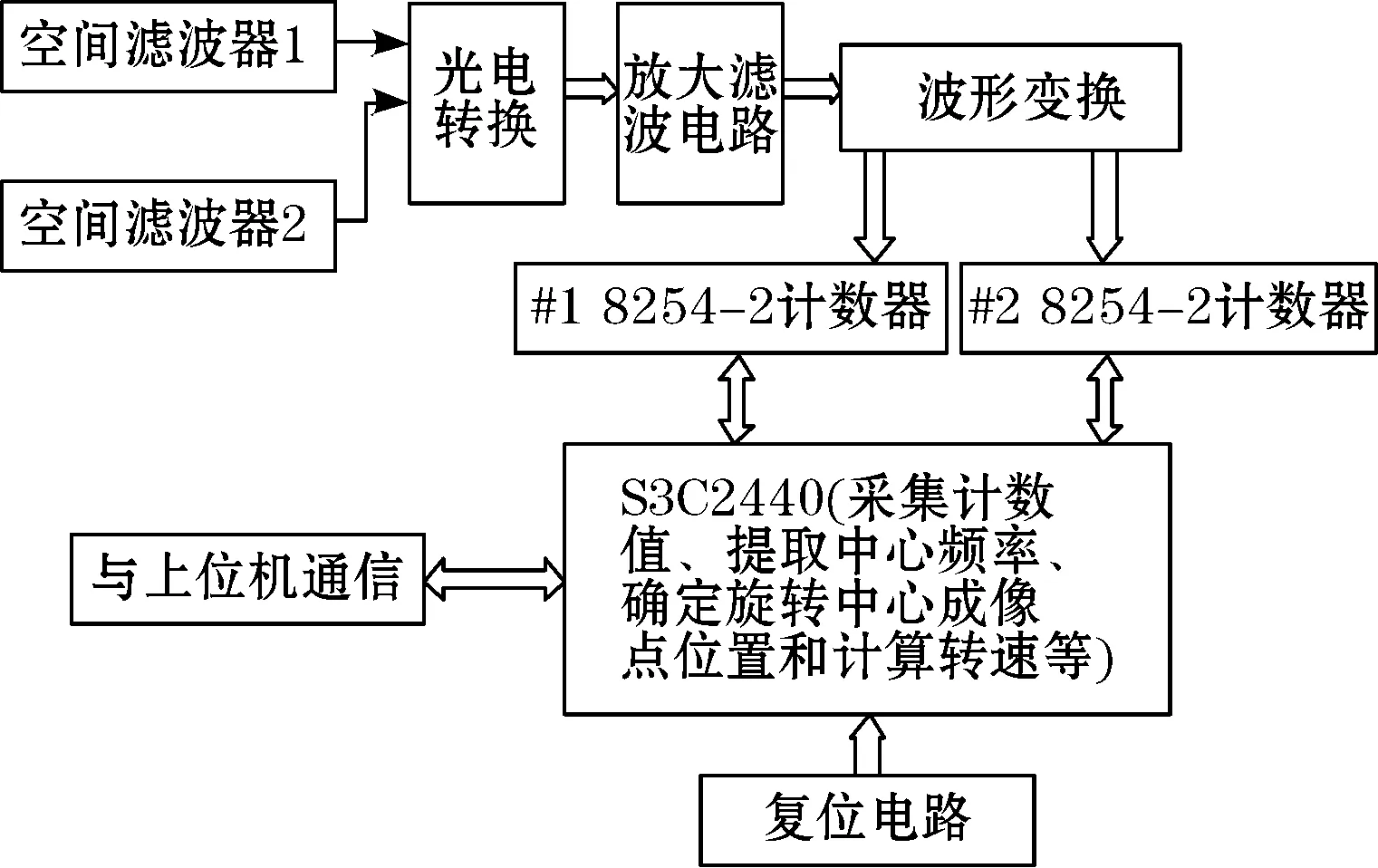
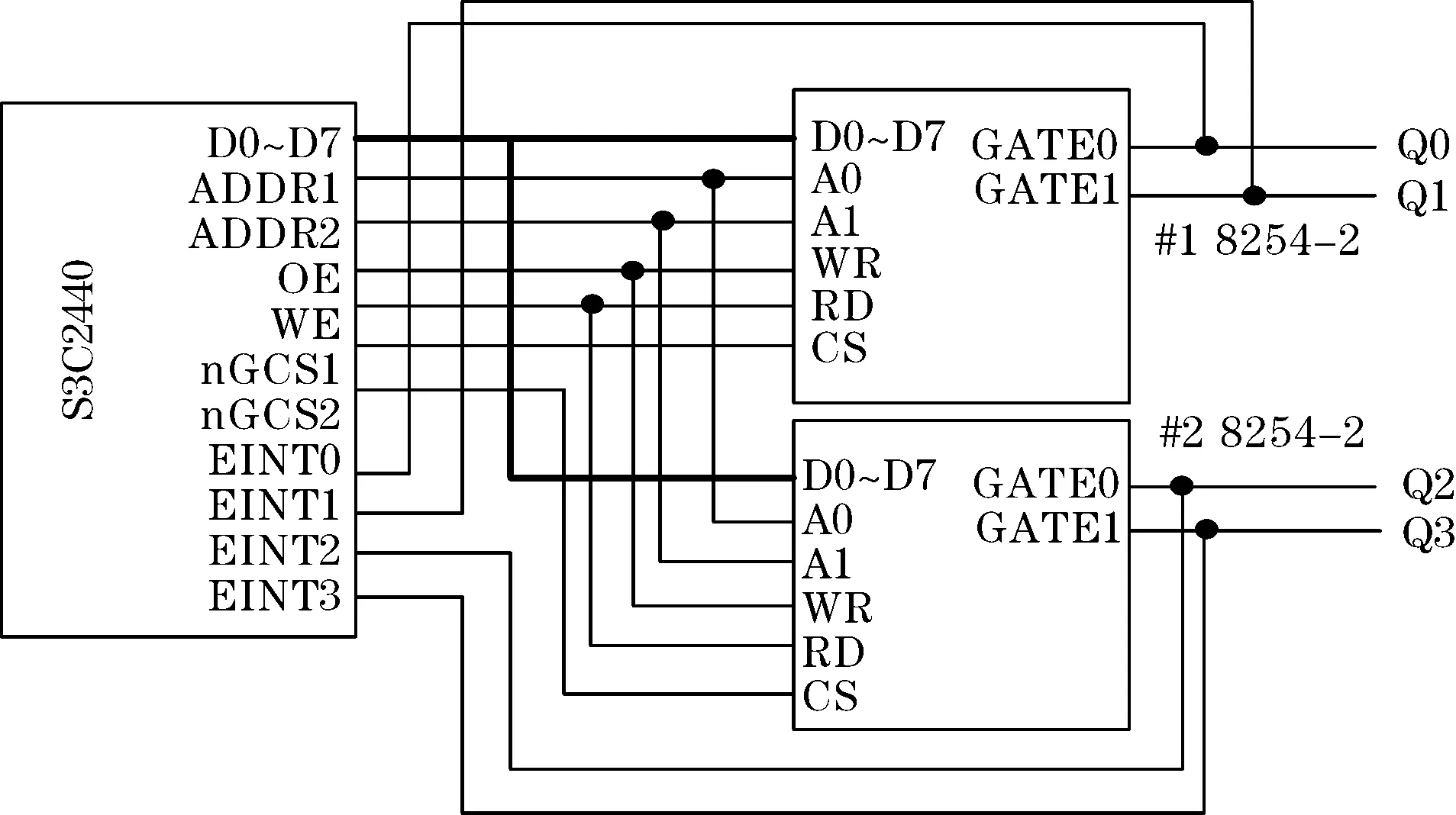
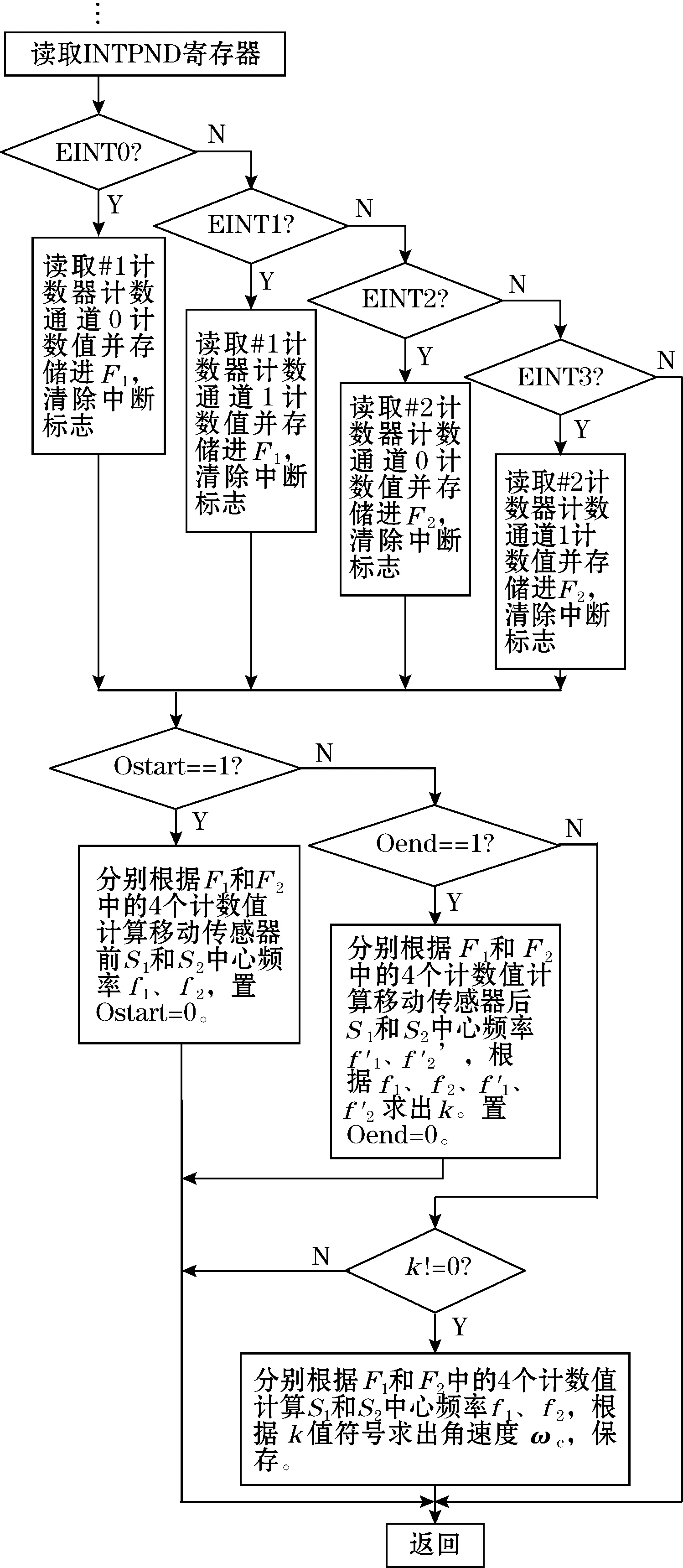
通过波形变换可得到与准正弦信号S1、S2准周期一致的矩形波信号,用高频脉冲插补法获取矩形波高电平的时间宽度,用多个高电平的时间宽度的平均值可计算出准正弦信号S1、S2的中心频率f1和f2。O′的位置区域可用以下方法来判定:首先获取信号S1和S2的中心频率f1、f2,以较大的中心频率作为f1;向f1对应的空间滤波器方向移动双空间滤波传感器,再次获取f1和f2对应信号的中心频率f1′和f2′,计算系数k=((f1-f2)(f1′+f2′))/((f1+f2)(f1′-f2′));根据k值判定旋转中心像点的位置区域,k<1表示O′点在SF1和SF2中心线之间,k>1代表O′点在SF1和SF2的下同侧或上同侧。当双空间滤波传感器的移动量δ满足0<δ 根据上述的空间滤波转速遥测方法,设计了基于双空间滤波传感器的转速遥测仪的信号预处理、数据采集及处理子系统,包括双空间滤波传感器、光电转换、放大及波形变换、计数、数据采集与处理等组成部分,如图2所示。被测体表面图像经空间滤波、成像系统和光电转换后得到2路准正弦信号,每路信号经放大、滤波和波形变换后得到2个互补的矩形波,用高频脉冲插补法和8254-2计数器得到矩形波的高电平宽度;由高性能处理器S3C2440采集高电平宽度的脉冲计数值,并计算出信号的中心频率;用信号的中心频率及其变化确定旋转中心位置以及转速,并显示在上位机上。 图2 转速遥测系统的信号预处理、数据采集与处理子系统图 2.1 空间滤波器及光电探测器 空间滤波器的主要功能是将旋转体表面随机分布的宽空间谱运动图像转变为窄带信号,光电探测器将窄带信号转换为准正弦电信号。本设计采用了A5V-38光电池阵列,该光电池阵列兼具空间滤波和光电转换的功能,简化了系统结构。实验系统采用两个平行排列且相距为60 mm的两个光电池阵列构成空间滤波转速遥测传感器。 2.2 放大滤波电路 两个光电池阵列输出的短路电流与入射光强成线性关系。本设计采用短路电流作为信号载体,采用运放AD4500-2实现短路电流到电压的转换并进行多级放大,所用运放的失调电流最大为2 pA;再用四阶巴特沃斯低通滤波器对放大后的信号进行滤波(通带为0~10 kHz)。 2.3 波形变换和计数电路 根据转速遥测原理知,通过测量两个光电池阵列输出信号的中心频率可计算出转速值。频率测量可采用高频脉冲插补法或频谱法。频谱法的高分辨率需要较长时间的采样数据,且运算量大。用高频脉冲插补法测量频率比较简单,通过提高脉冲频率可达到高的分辨率。本设计用高频脉冲插补计数法测量准正弦信号S1和S2的中心频率。图3为波形变换和高频脉冲计数电路:用比较器AD8561将经放大和滤波后的信号S1和S2转换成矩形波信号,该矩形信号再用D触发器二分频得到两个互为反相的、电平宽度与准正弦信号准周期一致的两路矩形信号;用高频脉冲插补法测量二分频后矩形信号的电平宽度,得到原准正弦信号的每个准周期,用多个准周期的平均值计算出准正弦信号的中心频率。 图3 波形变换及计数器电路 用可编程计数器8254-2设计高频脉冲插补计数电路。8254内部有3个完全相同而又独立的16位减法计数器,每个计数器有6种工作方式,可按编程设定的方式工作。用2片8254-2计数器测量信号S1和S2的中心频率,信号S1经二分频电路输出的2路矩形信号Q0、Q1分别连接到第一片计数器的GATE0和GATE1,信号S2经二分频电路输出的2路矩形信号Q2、Q3分别连接到第二片计数器的GATE0和GATE1,2片计数器的高频计数脉冲由外部有源晶振提供。 2.4 数据采集和处理 信号S1和S2的准周期值经8254-2计数器计数后,需要将2片8254-2中4个计数器的值无丢失地采集到计算机系统中去,并由计算机中的旋转中心判定算法确定旋转中心;根据旋转中心的位置区域,再用信号中心频率f1和f2计算出转速值。在比较多种微处理器系统的性能后,本设计采用ARM9的S3C2440为主控制器。S3C2440是最高频率达400 MHz的ARM9微控制器,其功能接口丰富,被广泛应用于工业控制、数据采集、医疗系统等的开发。 在S3C2440的中断逻辑中,各外部中断源以逻辑“或”的方式连接到中断控制器的一个中断口。当外部中断到来时,中断源寄存器SRCPND的对应位置1,优先逻辑电路判断出优先处理中断源后将中断寄存器INTPND对应位置1,并引起外部中断。INTPND寄存器中的0、1、2、3位分别对应外部中断源0、1、2、3。S3C2440的外部中断源与2片8254-2计数器的连接如图4所示,第一片8254-2的GATE0和GATE1分别与外部中断源0和1连接,第二片8254-2的GATE0和GATE1分别与外部中断源2和3连接。S3C2440分配给8254-2的端口地址为:#1:8000000H~8000006H,#2:10000000~10000006H。 图4 计数器与主控制器的连接电路图 系统软件流程图如图5和图6所示。图5是主程序流程,首先是初始化操作,包括设置8254工作方式为方式2,设初始计数值为0xffff,Ostart、Oend、k和ωc的初始值为0,建立4个字的数组F1和F2,开外部中断,显示角速度ωc值;当表示移动空间滤波传感器的按键按下时,移动开始键按下则置Ostart为1,移动结束键按下则置Oend为1,再循环等待外部中断。 图6是外部中断程序流程图。INTPND寄存器的EINT0、EINT1、EINT2、EINT3位分别对应外部中断源0、1、2、3。在外部中断程序中,读取INTPND寄存器,查询并判断外部中断请求源;根据中断源判断结果读取对应计数器的计数值并存储到数组F1或F2中;当Ostart为1时,根据F1和F2中的计数值计算空间滤波传感器移动前的中心频率f1、f2;当Ostart不为1且Oend为1时,计算空间滤波传感器移动后的中心频率f1′、f2′,根据f1、f2、f1′、f2′计算k;当Ostart和Oend都不为1时,根据F1和F2中的计数值计算当前的中心频率f1、f2,并根据k值符号用式(1)计算当前角速度ωc。 图5 主程序流程图 图6 外部中断处理流程图 根据空间滤波转速遥测方法,设计并制作了其信号预处理电路、数据采集与处理子系统,设计并编程实现了数据处理软件及上位机通讯软件,建立了如图7所示的转速遥测装置;其双空间滤波传感器的结构参数为:栅距P=1.98 mm,L=60 mm,用PC机实时显示旋转速度的测量值。该装置可以实现旋转物体转速参量的非接触式或远距离测量,其测量误差可在5%之内,满足转速遥测的基本要求。该装置的测量精度还可通过设计专用的光学成像系统、更准确和实时地获取信号的中心频率等方法,来进一步提高测量精度。 本文在阐述了双空间滤波转速遥测原理后,设计了转速遥测仪中的信号预处理、数据采集与处理子系统,建立了旋转速度遥测装置,实现了转速的远距离或非接触式测量。设计结果表明:该信号预处理、数据采集与处理子系统能够实现光电探测器输出信号的处理、多路数据的采集与处理;基于该子系统的转速遥测装置可实现转速的非接触式测量。该装置不需在被测体上安装任何测量基准,对径向和轴向晃动不敏感,使用简单方便,可广泛用于旋转机械、气液固多相混合物等的转速或涡旋速度的遥测。 图7 旋转速度遥测装置 [1] 李汉.一种光电编码器抗振动测速的方法.电气传动,2010,40(6):78-80. [2] 曹青松,俞爱兰.高精度转速测量新方法的研究.机床与液压,2010,38(17):38-44. [3] 郭清.霍尔传感器在直流电机转速测量中的应用研究.传感器与微系统,2011,30(7):54-56. [4] 杨海马,刘瑾.一种新型光学转速测量方法的研究.仪器仪表学报,2005,26(8):85-87. [5] 陈琳,谭跃刚,魏莉.一种基于光纤光栅的非接触式转速测量方法.机械工程与自动化,2011(5):117-119. [6] 张春友,吴晓强.主动避振自稳定的光电速度位移传感器设计.仪表技术与传感器,2014(12):15-17. [7] 钱伟强,徐平.四象限光电探测器用于转速测量的研究.光电工程,2006,33(9):67-70. [8] AIZUT Y,ASAKURA.Principles and Development of Spatial Filtering Velocimetry.Applied Physics B,1987,43:209-224. Design of Data Acquisition and Processing System for Remote Rotation Velocimeter LIU Quan-shun,ZENG Xiang-kai,ZHU Zhi-xiong,CHEN yang (School of Optoelectronic Information,Chongqing University of Technology,Chongqing 400054,China) According to the spatial filter velocimetry and its data processing method,the design of data acquisition and processing subsystem for the remote measurement system of rotational velocity,in which a remote rotation velocimeter has been constructed was presented in this paper.Two parallel photovoltaic arrays arranged with a certain interval form a double spatial-filtering sensor (DSFS) which output two quasi-sinusoidal signals S1and S2.Each of the two quasi-sinusoidal signals was converted into two complementary rectangular signals by use of waveform transform.The programmable counters of 8254-2 were applied to measuring the high-level width of the rectangular signals.The microprocessor S3C2440 with high performances was employed to collect the values of the counters.The central frequency of one quasi-sinusoidal signal was obtained by averaging out several high-level widths of the rectangular signal that is from the quasi-sinusoidal signal.The location of the imaged rotational-center of the measured object was determined by the central frequencies and their variations of S1and S2.Then the rotational velocity was calculated and displayed with the rotational center location and the central frequencies of S1and S2.The experimental results show that the designed subsystem is able to acquire and process multichannel data in the remote rotation velocimeter. spatial filtering;rotational velocity;central frequency;programmable counter;ARM9 microprocessor 曾延安(1964—),副教授,博士,主要研究方向为光电成像技术。E-mail:zya401@126.com 张超(1988—),硕士研究生,主要研究方向为光电成像技术。E-mail:czhang2012@126.com 重庆市时栅传感及先进检测技术重点实验室基金(2013TGS006);重庆理工大学研究生创新基金(YCX201303) 2014-12-31 收修改稿日期:2015-06-17 O439 A 1002-1841(2015)10-0027-032 系统设计

3 软件设计

4 设计结果
5 结束语
猜你喜欢
煤气与热力(2022年2期)2022-03-09
遥测遥控(2022年1期)2022-02-11
湖北师范大学学报(自然科学版)(2020年2期)2020-06-30
民用飞机设计与研究(2019年2期)2019-08-05
民用飞机设计与研究(2019年2期)2019-08-05
电子制作(2019年11期)2019-07-04
通信技术(2018年11期)2018-11-07
智能计算机与应用(2018年6期)2018-10-31
时代英语·高二(2017年4期)2017-08-11
解放军健康(2017年5期)2017-08-01