基于磁敏测量技术的拉线式位移传感器
2015-06-07 10:47赵康康邓士龙苏颜欣张从鹏
仪表技术与传感器 2015年2期
毛 潭,赵康康,邓士龙,苏颜欣,张从鹏
(北方工业大学机电工程学院,北京 100144)
基于磁敏测量技术的拉线式位移传感器
毛 潭,赵康康,邓士龙,苏颜欣,张从鹏
(北方工业大学机电工程学院,北京 100144)
基于磁敏感角度测量处理器MLX90316开发了一种拉线式位移传感器。分析了拉线位移传感器的测量原理并推导了拉线位移与滚轮角度的解析关系。基于Cortex ARM处理器,设计了位移传感器的角度信号采集和信号输出电路;完成了传感器的整机机械结构设计。开发了位移传感器的应用软件,具有参数设置、传感器标定及符合标准Modbus协议的通讯等功能。试验表明:拉线式位移传感器测量精度能达到0.02 mm,性能稳定,可满足工业领域对位移测量的需求。
MLX90316;STM32;拉线式;位移传感器;Modbus
0 引言
位移传感器是测量系统中的重要组成部分,其中,拉线式位移传感器在工业测量中具有广泛的应用。传统的拉线式位移传感器多采用多圈电位器作为位移传感器转角测量的核心部件[1],作为机械接触式测量元件,电位器存在易磨损、分辨力差、阻值偏低、高频特性差及测量精度低等缺点,而且由于受电位器圈数限制,难于满足大位移、高精度等应用领域的测量[2],导致拉线式位移传感器的应用范围受到很大的限制。为此,本文研究基于无接触磁敏角度测量原理的拉线式位移传感器技术,并开发满足工业测量应用的高性能拉线式位移传感器,具有一定的现实意义与实用价值。
1 传感器工作原理
拉线式位移传感器的工作原理如图1所示。通过设计的传感器运动机构,可将位移测量转化为轮毂旋转角度的测量。基于磁敏角度测量原理设计测量电路,实现轮毂角位置的测量,然后角位置信息经主控芯片计算处理后得到拉线的运动位移,并通过RS485通讯接口以数字信号输出。由于磁敏感应可实现非接触角位置测量,基于此原理设计拉线位移传感器时,量程可以不受测量元件的限制。

图1 位移原理示意图
根据上述测量原理,传感器的位移如式(1)所示:
(1)
式中:x为拉线拉伸或收缩的位移;l为单圈绕线长度;Δδ为拉线轴移补偿;θ0为初始角度值;θ为旋转之后的角度值。
由图1可知,由于在绕线过程中拉线排列产生了轴向的移动[3],所以式(1)中的单圈绕线长度与半径R、绕线排列的宽度等参数均相关。单圈绕线长度计算公式如式(2)所示:
(2)
式中:R为滚轮半径;d为拉线的直径。
为消除拉线轴向排列引起的测量偏差,对单圈绕线长度进行校正补偿,拉线轴移补偿如式(3)所示:
(3)
式中:h为滚轮下沿值导向孔的距离;w为绕线排列宽度;Q为绕线匝数。
综合式(1)~式(3)就可以确定位移与旋转角度的关系。
2 传感器机械结构设计
传感器的机械结构主要由拉线、恒力弹簧、转轴、轮毂、轴承、磁铁和壳体构成,如图2所示。恒力弹簧装于转轴左端,拉线为直径0.8 mm的软性涂塑不锈钢绳,其缠绕在轮毂上,依靠机构和弹簧力确保拉线单层无叠压缠绕,磁铁固定于转轴右端且与转轴同轴心,磁铁与磁敏芯片确保3 mm的轴向间隙[4]。

图2 传感器机械结构图
3 传感器测量系统设计
MLX90316是一款运用三轴霍尔技术的传感器芯片,作为角位置信息获取芯片,具有单圈14 bit的角度分辨率,有一路SPI数字串行输出。该芯片角度信号可以随磁场强度、温度等因素的变化进行自适应补偿,在恶劣环境下仍有较高的精确度。
传感器系统的主控芯片为STM32F103CBT6,该处理器为32位RISC内核的增强型芯片,具备串行SPI接口和USART接口[5],STM32F103CBT6通过SPI串行接口与MLX90316进行通信,采集角位置信号并处理,最后通过RS485接口进行数字量输出。
拉线位移传感器总体系统框图如图3所示。

图3 传感器总体系统框图
3.1 角度信号采集电路设计


图4 角度信号采集电路

主控芯片的SPI时序图如图5所示。

图5 STM32的SPI时序图
3.2 输出信号接口电路设计
STM32F103具有3路USART串行接口,并可利用DMA进行操作,通过MAX485芯片实现RS485数字通信功能。RS485通信传输数据具有传输距离远、抗干扰能力强、通信速率高等优点。RS485输出接口电路如图6所示,传感器电路板实物如图7所示。

图6 RS485输出接口电路设计图

(a)
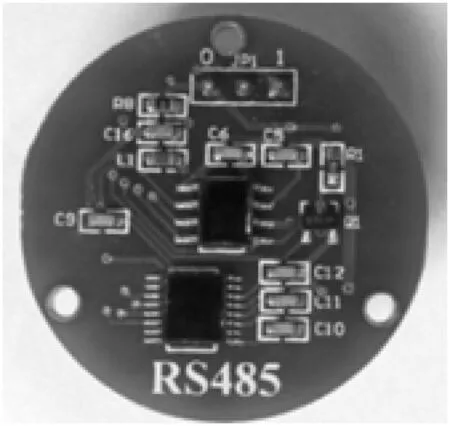
(b)
4 系统软件设计
传感器工作的主程序流程如图8所示。传感器系统在实现位移信息采集基本功能的同时,开发了一系列能够拓展传感器应用领域以及使用户人性化操作的功能。使用时可根据需求自行参数设置、传感器标定,并具有掉电位置记忆及符合标准Modbus协议的通讯等功能。软件主程序主要有以下几个模块组成,包括数据采集模块、数据处理模块、数据传输模块和参数设置模块。软件中断子程序主要有芯片电压检测模块、数据存储模块。子程序实时检测并判断芯片是否掉电,在掉电瞬间保存数据信息。
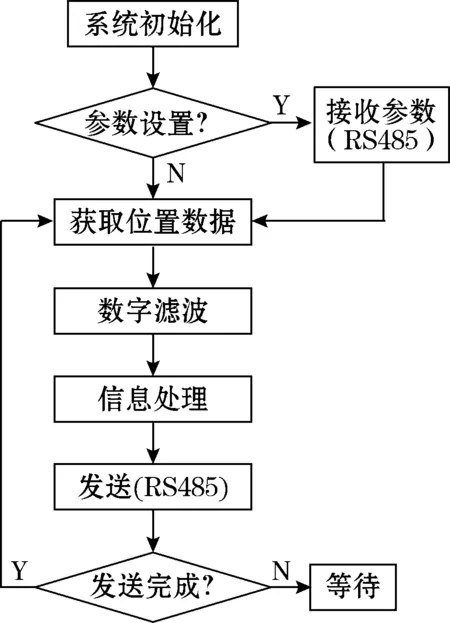
图8 主程序流程图
5 试验测试与分析
拉线位移传感器性能测试试验如图9所示。试验过程为:将0.5 m量程的移传感器外壳固定于数控机床的工作台上,传感器拉线的拉头与机床主轴端部固连,机床工作台带动传感器往复运动,实现位移传感器拉线的拉伸或收缩。试验系统安装完成后,对机床和传感器分别回零,然后操作机床运动,记录机床和传感器拉线的运动位移,试验数据记录如表1所示。
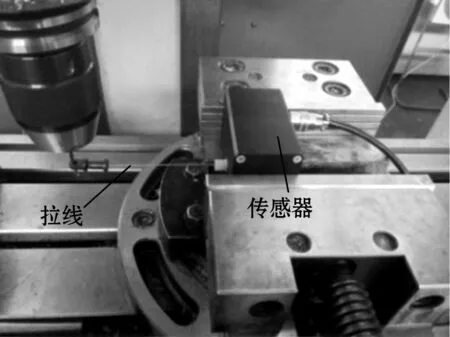
图9 拉线式位移传感器测试现场图
分析实验数据可知,传感器测量精度可达0.02 mm,根据线性度计算公式[8]:δ=(ΔYmax/Yout)×100%,通过计算可得传感器的线性度达0.05%FS。
6 结论
基于STM32处理器和磁敏感角度测量芯片MLX90316,设计了一种符合标准工业协议的拉线式位移传感器,完成了传感器的机械结构、硬件电路及应用软件的开发与调试。传感器性能测试试验表明,拉线式位移传感器测量精度能达到0.02 mm,线性精度达到0.05%FS,使用简单,性能稳定,可满足多数工业领域对位移测量的要求。

表1 位移测量实验数据 mm
[1] 王兴,戚景观.一种新的拉线式位移传感器的设计及其应用.机械工程与自动化,2012(8):171-173.
[2] 张从鹏,徐兵,徐宏海.一种基于STM32的高精度多圈绝对角度传感器.仪表技术与传感器,2014(12):13-14.
[3] 但斌斌,周鼎,王光清,等.钢丝绳缠绕卷筒的计算原理及其应用. 湖北工学院学报,2003(4):75-76.
[4] 刘昊,彭光正,郭海荣. 灵巧手中霍尔传感器测角精度的仿真研究. 仪器仪表学报,2010(10):2254-2259
[5] 刘波文. ARM Cortex-M3应用开发实例详解.北京:电子工业出版社,2011:144-171.
[6] WILMSHURST T. PIC嵌入式系统开发. 陈小文,闫志强,译. 北京:人民邮电出版社,2008:259-260.
[7] 马明建. 数据采集与处理技术. 西安:西安交通大学出版社,2005:19-20.
[8] 马军山,王向朝,方祖捷,等.精密角度传感器及其标定技术的研究. 光学学报,2001(2):222-235.
Design of Cable-displacement Sensor Based on Magnetic Sensitive Technology
MAO Tan,ZHAO Kang-kang,DENG Shi-long,SU Yan-xin,ZHANG Cong-peng
(College of Mechanical and Electrical Engineering,North China University of Technology,Beijing 100144,China)
A cable-displacement sensor based on magnetic sensitive technology was presented. The measuring principle of the sensor was analyzed and the analytical relationship between the displacement and angle of the cable roller was proposed. The angle signal acquisition circuit and the output interface circuit based on Cortex ARM were developed. The design of mechanical structure was accomplished. The intelligent software which can set the relevant parameters,calibrated sensor and implemented the Modbus protocol was developed. The experiment demonstrates that the measurement accuracy of sensor is 0.02 mm,and the sensor has stable performance,which can meet the needs of displacement measurement of industrial applications.
MLX90316;STM32;Cable;Displacement Sensor;Modbus
2014-10-12
TP23
A
1002-1841(2015)02-0108-03
毛潭(1982—),硕士,讲师,研究方向为数字化制造技术与装备。E-mail:t.mao@163.com 赵康康(1988—),硕士研究生,研究方向为嵌入式系统开发。E-mail:junfeng_1025@126.com
猜你喜欢
科学技术与工程(2022年23期)2022-09-30
一重技术(2021年5期)2022-01-18
防爆电机(2021年6期)2022-01-17
农村电气化(2021年4期)2021-05-12
保健医苑(2020年1期)2020-07-27
电子技术与软件工程(2020年10期)2020-02-01
制造技术与机床(2019年11期)2019-12-04
电子制作(2017年20期)2017-04-26
风能(2016年7期)2016-03-23
中学数学杂志(高中版)(2006年4期)2006-07-19