
多约束条件下汽车复合制动协调优化
2015-06-05 09:06黄大星
重庆交通大学学报(自然科学版) 2015年3期
黄 大 星
(韶关学院 汽车系,广东 韶关 512005)
多约束条件下汽车复合制动协调优化
黄 大 星
(韶关学院 汽车系,广东 韶关 512005)
针对当前混合动力汽车制动系统存在电机再生制动力和液压摩擦制动力一起工作而带来的相关问题,设计了双电机前轴复合制动系统。以前后轴制动力分配比例、ECE制动法规、电机特性、储能装置特性等因素为约束条件,研究了基于分层控制的混合动力汽车复合制动控制协调策略;利用MATLAB/Simulink对3种制动工况的制动力进行了仿真分析。结果表明:对汽车复合制动力实施层次协调控制后,复合制动力与驾驶员需求制动力误差有较明显降低,说明协调控制后车辆的制动舒适性有较大提高。
车辆工程;复合制动力;多约束;分层控制;协调控制
汽车复合制动是指汽车制动时,制动轮上既有液压摩擦制动力的作用,又有电机再生制动力的作用,这时汽车既能有效地完成制动功能又可以较好的回收制动能量[1]。为了提高车辆燃油经济性,汽车制动系统应该在保证汽车制动稳定性的前提下,尽可能优先使用电机再生制动,以回收制动能量。笔者设计了双电机的汽车复合制动系统,以前后轴制动力分配比例、ECE制动法规、电机特性、储能装置特性等因素为约束条件[2-3],对复合制动系统中制动力分配策略进行研究,以满足驾驶员的制动需求,同时保证车辆制动时的平顺性。
1 复合制动系统结构与工作原理
课题组所开发的汽车复合制动系统结构如图1,系统中所使用的电机位于前桥,这时电机所产生的再生制动力只施加于前轮,液压制动系统管路采用双回路交叉(X)型连接,相对于传统汽车的液压制动系统,双电机前轴复合制动系统增加了电机控制模块、液压控制模块和制动踏板位移传感器等3个部件。制动踏板位移传感器的功能是用来感知驾驶员的制动意图。液压制动控制模块在制动踏板位移传感器感知所得到制动需求的基础上,通过 ABS电动泵、压力调节装置对常规液压制动力大小进行调整,同时根据ECE制动法规对前后轮制动力分配及制动工况要求,并将推算出的电机制动力和车辆滑移率等汽车状态信息传输到电机控制模块,给电机再生制动提供施加的机会。电机控制模块对电机制动功率、制动扭矩进行控制,实现电机再生制动。
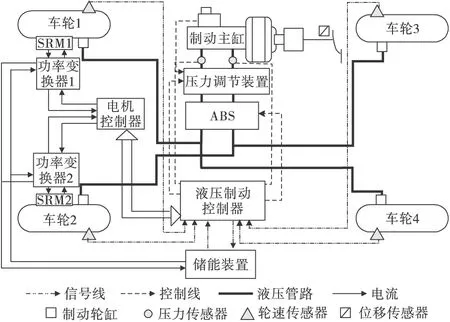
图1 双电机前轴复合制动系统结构
2 汽车复合制动力协调控制
2.1 约束条件
2.1.1 前、后轴制动力分配约束
为了保证制动时汽车的方向稳定性,即制动时汽车不发生制动跑偏、侧滑和失去转向能力等性能,应按照理想制动器制动力分配曲线(即I曲线)对前后轴制动力进行分配。根据汽车理论,要提高汽车制动稳定性,保证汽车制动时不发生跑偏、侧滑或失去转向能力等性能,前、后轮制动器制动力的分配就应按照I曲线进行分配,即按照理想的制动器制动力分配曲线进行分配。
根据制动过程车辆受力分析,可确定I曲线(图2)如式(1)[4-5]:
(1)
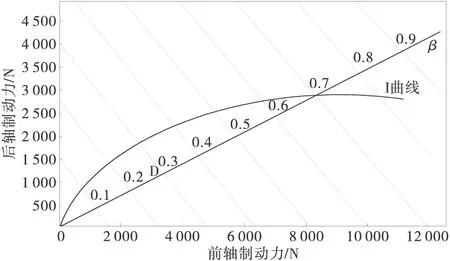
图2 理想制动器制动力分配曲线
根据制动力分配系数β的定义,有:
(2)
设z为制动强度,可由Fbneed=Gz确定,则可得:
Fbf=Gzβ
(3)
Fbr=Gz(1-β)
(4)
式中:Fbf为前轴制动器制动力,N;Fbr为后轴制动器制动力,N;L为汽车前后轴之间的距离,m;hg为质心高度,m;G为汽车重力,N;b为汽车质心至后轴中心线的距离,m。
2.1.2ECE制动法规约束
由于受到传统液压系统结构的约束,复合制动阶段前后轮液压制动力只能按照β线上升,但前轴(驱动轴)上同时存在液压制动力和再生制动力的作用[6]。一般说来,当汽车处于轻度制动时,汽车所需要的制动力较小,这时只需电机制动力就可以满足制动力需求,因此这时只采用纯电机再生制动;当紧急制动时,为了保证制动稳定性,这时应该采用纯液压制动;其它情况为复合制动。复合制动过程中,由电机再生制动力导致前后制动力分配的改变不应超过ECE法规的限制。
一般来说,车辆在城市循环工况下行驶时,道路拥堵、运行道路状况较好,因此车速较低(一般不超过60km/h),因此驾驶员进行制动时,产生的制动强度不高,笔者将复合制动过程的制动强度设定为在0.1~0.7之间[7-9]。这时由于前轮在液压制动力的基础上增加了再生制动力,导致前轮的利用附着系数上升,这就可能使前轮利用附着系数不能满足ECE法规的要求,而后轮由于利用附着系数下降,后轮制动稳定性提高。因此为了保证整车制动性能,ECE法规要求:前轮利用附着系数φ1≤(z+0.07)/0.85。
因此有前后制动力要满足:
(5)
式中:Fxb1,Fxb2分别为对应于制动强度z,前轴和后轴产生的地面制动力,N。
结合ECE法规,作得前后制动力分配图,如图3。在不考虑复合再生制动系统外特性约束的条件下,当实施最大能量回收策略下进行复合制动时,同时在满足ECE制动法规规定下,复合制动力下边界线与ECE制动法规边界线相切,即图3中AB线。当紧急制动(z>0.7)时,制动模式为纯液压制动,为了保证前轮不抱死,这时分配曲线应沿制动强度z=0.7的f线上升至与β线相交,即图3中BC线。
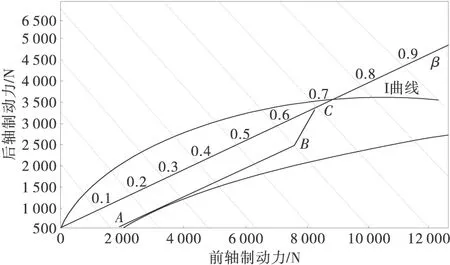
图3 ECE制动法规前、后轴制动力分配曲线
2.1.3 电机特性约束
由电机特性可知,汽车制动时,电机最大输出转矩受到电机最大转矩、最大功率、转速和效率的约束,即:
(6)
式中:Tmax为不同转速下电机的峰值转矩;Te为电机最大转矩;Pe为电机最大功率;η为电机发电效率。
2.1.4 储能装置约束
复合储能装置由铅酸电池与超级电容并联而成。汽车执行再生制动时,系统产生的反向电流给超级电容器充电,超级电容器存储回馈的再生能量,直至超级电容充满,倘若仍有制动需求,系统则发送命令驱动电池回收能量。根据复合储能装置使用安生性和使用寿命,应该考虑SOC和使用温度来约束充电电流。
(7)
(8)
式中:Imax_soc为SOC限制下储能元件最大允许充电电流,A;Imax_permit为储能元件最大允许充电电流,A;Imax_T为温度限制下储能元件最大允许充电电流,A;Tpermit为储能元件允许最高工作温度,℃。
2.2 控制策略
混合动力汽车在制动状态下,车辆常常工作于多种制动模式的相互切换,为了提高汽车制动舒适性,在制动模式切换过程中应尽量使液压制动系统和电机再生制动系统所产生的制动力满足驾驶员制动力的需求,这就要求对复合制动力进行协调控制。为了有效地对混合动力车辆制动力进行控制和最大化回收制动能量,笔者提出了基于分层控制的混合动力汽车复合制动协调策略。
图4为混合动力汽车制动系统的分层控制系统的结构。共分为3层:管理层,协调层和执行层。
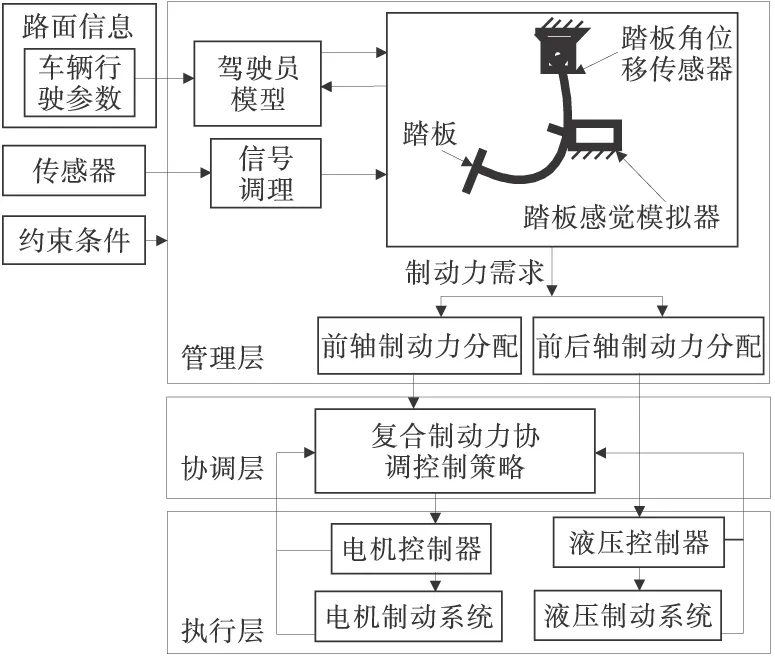
图4 复合制动控制器结构
管理层为驾驶员模型,基于路面信息(车辆行驶参数)以及2.1节中的4个约束条件,汽车驾驶员所期望的车辆制动力是通过制动踏板传感器来反映的,这同时也体现了驾驶员的制动意图。
协调层主要包括制动力分配控制策略和制动力动态协调控制策略。制动力分配控制策略是根据管理层的制动意图和车辆运行状态来确定整车制动需求力矩,将整车需求制动力矩和电机制动力进行比较分析,确定车辆的制动模式,然后按相应制动模式对车辆的前后轴制动力的分配,再根据电机和电池的工作状态将前轴制动力分配给液压制动系统和电机制动系统。
执行层主要包括液压制动系统及其控制器和电机及其控制器,主要是利用协调层所发出的电机制动力命令和液压制动力命令分别对电机制动系统和液压制动系统进行控制,所得到的实际的电机制动力和实际的液压制动力反馈给协调层,供协调层控制所用。
根据汽车驾驶员制动意图、约束条件、需求制动力大小、电池荷电状态SOC的大小和制动强度大小等汽车运行状态参数可以判断制动系统的工作模式。常规制动模式控制原理是当制动意图为轻微制动时,并且车速较低时,考虑经济性需求,则进行电机再生制动;当制动意图为紧急制动,并且车速较高时,考虑制动安生性,则进行纯液压制动;其它情况需要对制动强度、SOC、车速、电机及储能装置特性等进行综合判断,以确定制动模式,汽车复合制动控制策略流程如图5。
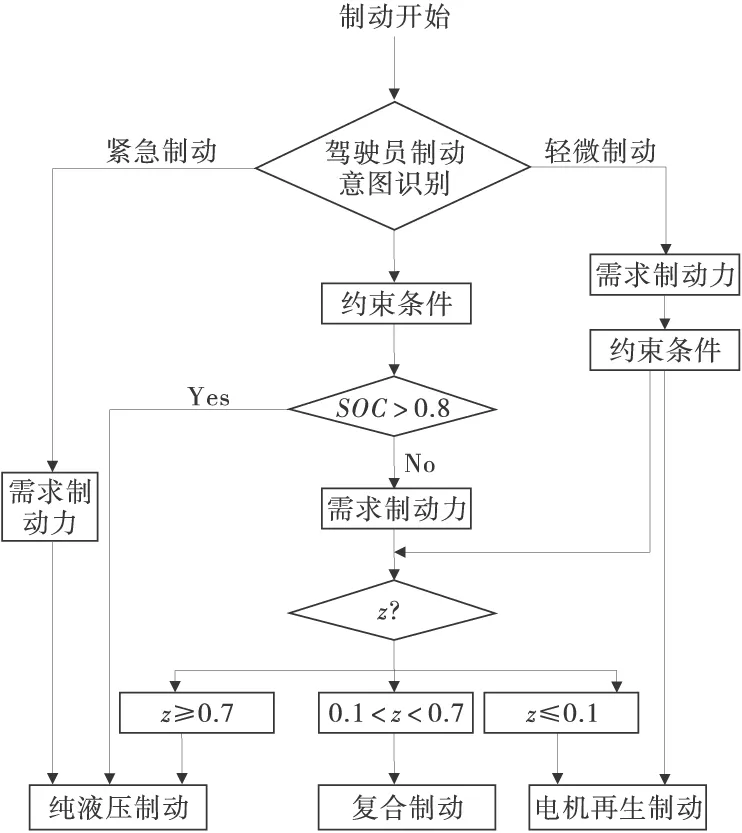
图5 复合制动控制策略流程
3 复合制动力协调控制仿真试验
3.1 仿真参数
笔者利用MATLAB/Simulink仿真工具对汽车复合制动系统的控制逻辑进行仿真分析,所使用的车辆相关参数如表1~表4。

表1 车辆常规技术参数

表2 电机系统参数
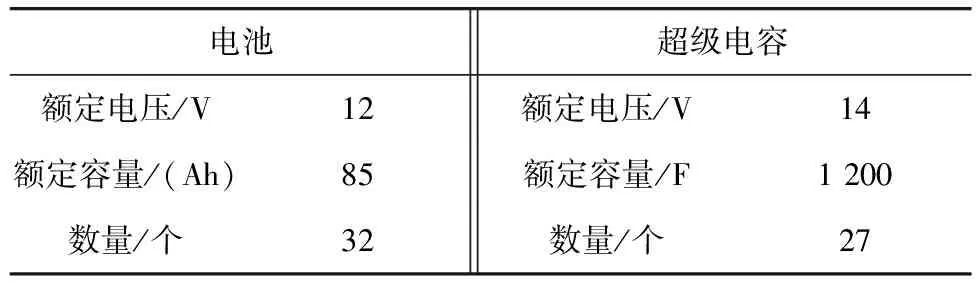
表3 电池与超级电容相关参数
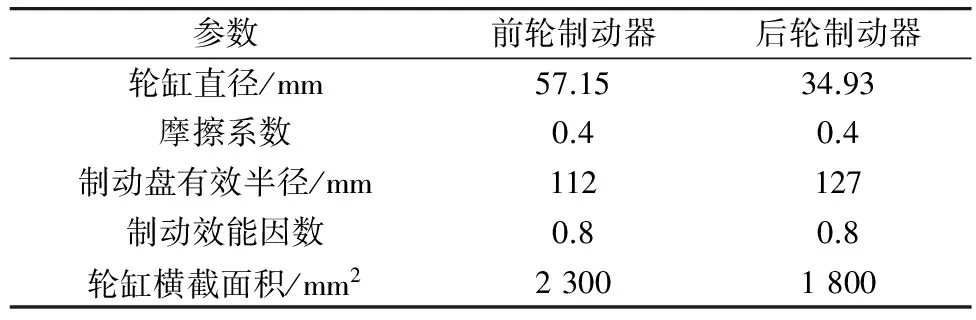
表4 常规液压制动系统参数
3.2 仿真分析
仿真试验是假设地面附着力足够(笔者选取地面附着力为0.7),这时车辆无滑移,即汽车制动不需要进行防抱死制动控制。仿真初始速度选取50 km/h,笔者根据制动效能划分将制动强度等级分为轻度制动、中度制动、重度制动3种,仿真试验选取制动强度大小分别为0.1(轻度制动),0.3(中度制动),0.7(重度制动)。
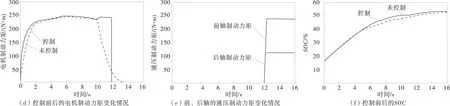
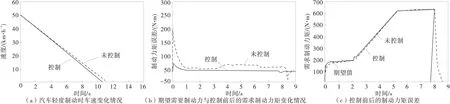
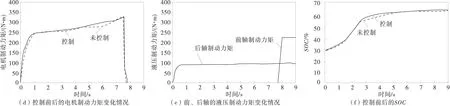
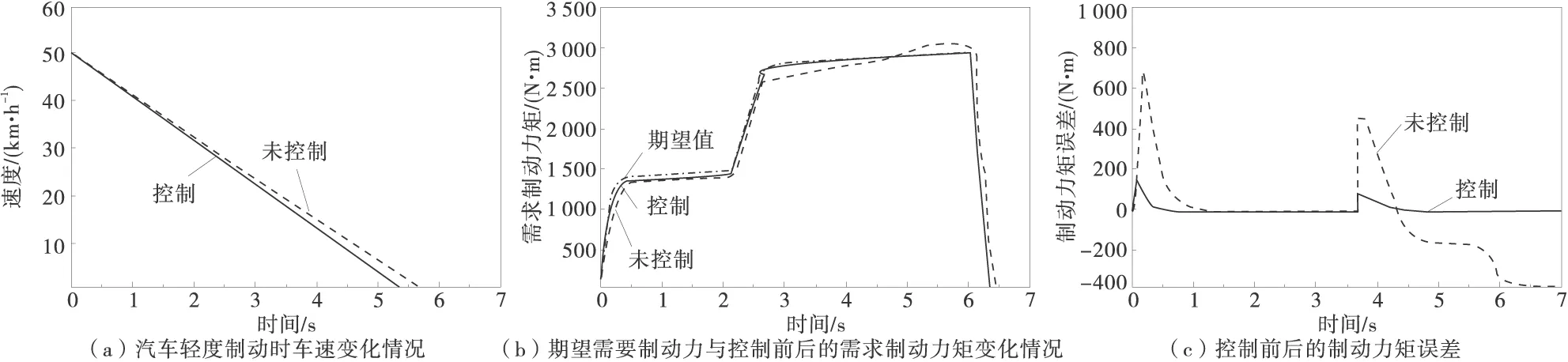
当制动强度为0.1时,SOC为0.18时,车辆前轴制动力主要由电机再生制动力提供,在车速 图6 制动强度为0.1时的仿真结果 车辆在中等制动强度为0.3时,汽车制动状态处于液压摩擦制动与电机再生制动的复合制动模式,该复合制动模式下的仿真结果如图7。由于电机系统和液压系统动态响应不同,当两者一同进行制动时,其制动力很难相互补偿以满足驾驶员的制动需求,这就导致需求制动力与实际制动力存在较大误差,这时制动舒适性较差。由图7可见,协调控制后,制动力误差有较大改善,协调控制后制动力误差由原来的±32 N·m改善为±5 N·m。因此该模式下的复合制动系统经过层次协调控制后提高了制动舒适性。 图7 制动强度为0.3时的仿真结果 当制动强度为0.7时,由于需求制动力较大,制动时间较短,为了保证车辆的稳定性,此时车辆进入纯液压制动模式,该模式下的仿真结果如图8。从图8可见,纯液压制动模式中由于关闭电机系统,这就导致车辆制动系统响应变慢,这使制动力矩误差较大,影响了制动舒适性。协调控制后制动力误差由原来的±483 N·m改善为±25 N·m。因此该模式下的复合制动系统经过层次协调控制后提高了制动舒适性。 图8 制动强度为0.7时的仿真结果 笔者利用设计的双电机前轴复合制动系统,以前后轴制动力分配比例、ECE制动法规、电机特性、储能装置特性等因素为约束条件,对复合制动系统中制动力分配策略进行研究,并提出了复合制动力层次协调控制策略,以满足驾驶员的制动需求和制动舒适性。 基于MATLAB/Simulink对汽车电液复合制动系统进行无滑移的多制动模式进行了仿真试验,试验结果表明,笔者的基于多约束条件下对汽车复合制动力层次协调控制策略,可以降低制动力误差,提高制动舒适性。 [1] 俞剑波,何仁.混合动力电动汽车混合制动技术分析[J].重庆交通大学学报:自然科学版,2013,32(4):705-711. Yu Jianbo,He Ren.Hybrid braking technology for hybrid electric vehicle [J].Journal of Chongqing Jiaotong University:Natural Science,2013,32(4):705-711. [2] 尹安东,赵韩,张炳力.微型电动轿车制动能量回收及控制策略的研究[J].合肥工业大学学报,2008,31(11):1760-1764. Yin Andong,Zhao Han,Zhang Bingli.Study on regenerative braking and control strategy for electric vehicles[J].Journal of Hefei University of Technology,2008,31(11):1760-1764. [3] Zhang Junzhi,Lu Xin,Xue Junliang.Regenerative braking system for series hybrid electric city bus[J].The World Electric Vehicle Journal,2008,2(4):128-134 [4] 蒋励.基于理想制动力分配曲线的复合制动设计[J].汽车科技,2006(1):23-29. Jiang Li.Compound brake design based on ideal braking force distribution [J].Vehicle Science and Technology,2006 (1):23-29. [5] 余志生.汽车理论[M].5版.北京:机械工业出版社,2010. Yu Zhisheng.Vehicle Theory[M].5th Ed.Beijing:Mechanical Industry Press,2010. [6] 秦大同,邓涛,杨阳,等.基于前向建模的ISG型CVT混合动力系统再生制动仿真研究[J].中国机械工程,2008,19(5):618-624. Qin Datong,Deng Tao,Yang Yang,et al.Regenerative braking simulation research for CVT hybrid electric vehicle with ISG based on forward modeling [J].China Mechanical Engineering,2008,19(5):618-624. [7] 耿聪,刘溧,张欣,等.EQ6110混合动力电动汽车再生制动控制策略研究[J].汽车工程,2004,26(3):253-256. Geng Cong,Liu Li,Zhang Xin,et al.A Study on control strategy for regenerative braking in EQ6110 hybrid electric vehicle[J].Automotive Engineering,2004,26(3):253-256 [8] 李蓬,金达锋,罗禹贡,等.轻度混合动力汽车制动能量回收控制策略研究[J].汽车工程,2005,27(5):570-574. Li Peng,Jin Dafen,Luo Yugong,et al.Regenerative braking control strategy for a mild HEV[J].Automotive Engineering,2005,27(5):570-574. [9] 赵国柱,杨正林,魏民祥,等.基于ECE法规的电动汽车再生制动控制策略的建模与仿真[J].武汉理工大学学报:交通科学与工程版,2008,32(1):149-152. Zhao Guozhu,Yang Zhenglin,Wei Minxiang,et al.ECE regulation based modeling and simulation of control strategy for regenerative braking in EV and HEV[J].Journal of Wuhan University of Technology:Transportation Science & Engineering,2008,32(1):149-152. Coordinated Control Optimization of Composite Braking System of Hybrid Electric Vehicle with Multi-Constraints Huang Daxing (School of Automobile, Shaoguan University, Shaoguan 512005, Guangdong, China) In view of the current existing problems of related to motor regenerative braking and hydraulic friction braking work together, composite brake system with double motor was designed. Based on hierarchical control, a braking force distribution strategy of composite braking system was developed, considering the restriction of the distribution ratio of braking force upon front and rear, ECE braking regulation, motor characteristic and energy storage characteristic, etc. Finally the simulation of control strategy of composite braking system in MATLAB/Simulink environment was done under three operating modes. The results indicate friction braking system and motor regenerative braking system can work coordinately and steadily in various operating mode under the regenerative braking control strategy, and show that the error of composite braking force and braking force driver demand reduce significantly, vehicle brake comfort has improved greatly. vehicle engineering; composite braking force; multi-constraints; hierarchical control; coordinated control 10.3969/j.issn.1674-0696.2015.03.29 2013-12-12; 2014-03-17 韶关市科技计划项目〔韶财教(2012)105号〕;江苏省汽车工程重点实验室开放基金项目(QC200804) 黄大星(1979—),男,江西永丰人,讲师,硕士,主要从事汽车节能控制技术方面的研究。E-mail:huangdaxing2007@163.com。 U463.53 A 1674-0696(2015)03-146-06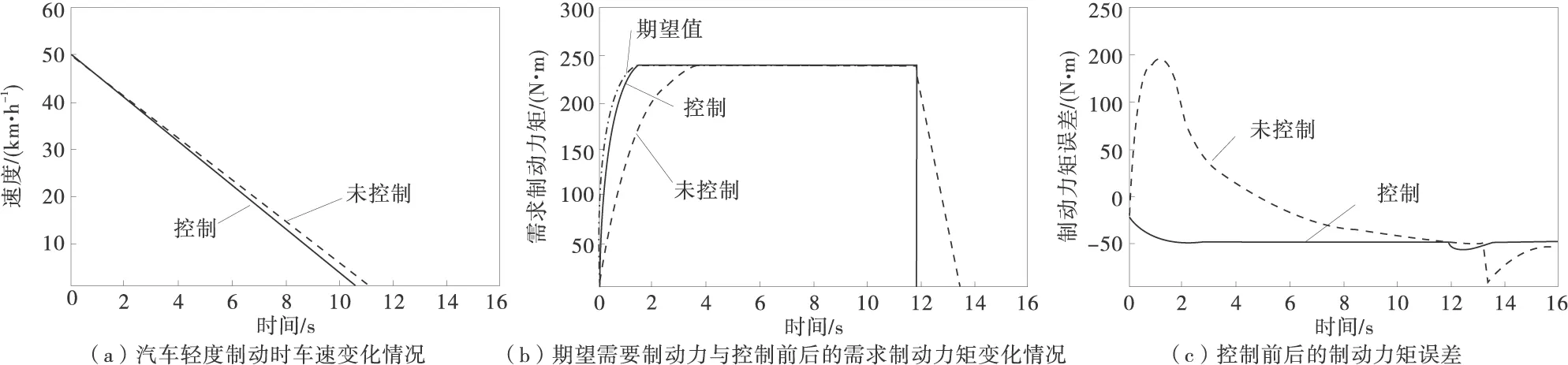

4 结 语
猜你喜欢
煤气与热力(2021年6期)2021-07-28
煤气与热力(2021年4期)2021-06-09
山东冶金(2019年3期)2019-07-10
消费导刊(2018年10期)2018-08-20
通信电源技术(2018年3期)2018-06-26
能源(2017年12期)2018-01-31
自动化学报(2017年4期)2017-06-15
山东工业技术(2016年15期)2016-12-01
通信电源技术(2016年1期)2016-04-16
中国塑料(2015年3期)2015-11-27
