
双端供电模式下高速磁浮列车牵引控制策略研究
2015-06-01 12:29刘金鑫葛琼璇王晓新崔冬冬
电工电能新技术 2015年6期
刘金鑫,葛琼璇,王晓新,崔冬冬
(1.中国科学院电工研究所中国科学院电力电子与电气驱动重点实验室,北京100190; 2.中国科学院大学,北京100039)
双端供电模式下高速磁浮列车牵引控制策略研究
刘金鑫1,2,葛琼璇1,王晓新1,崔冬冬1,2
(1.中国科学院电工研究所中国科学院电力电子与电气驱动重点实验室,北京100190; 2.中国科学院大学,北京100039)
双端供电模式是磁浮列车高速稳定运行的一种重要工作模式,本文建立了该模式下磁浮列车的数学模型,并提出了相应的牵引控制策略。在Simulink中搭建了控制系统仿真模型,对比了不同控制条件下磁浮列车的运行情况,仿真结果证明了控制策略的有效性。最后将提出的控制策略在硬件在环的高速磁浮交通实时仿真平台进行了验证,半实物仿真结果表明在所提的控制策略下高速磁浮列车可以可靠运行。
高速磁悬浮列车;双端供电;前馈控制;解耦控制;硬件在环
1 引言
高速磁浮轨道交通具有速度快、能耗低、运量大、适合远距离高速运输等优点。我国引进德国技术建成的高速磁悬浮上海示范线最快速度可以达到430km/h,是速度最快的陆地交通工具。牵引系统是高速磁浮交通的核心技术之一,目前只有日本和德国掌握此项技术。我国在上海示范线的基础上对牵引系统进行了深入的研究,取得了一定的成果[1,2]。
高速磁浮交通的牵引系统主要由输入输出变压器、三电平大功率变流器、长定子直线同步电机(LSM)、牵引控制系统以及相应的轨旁设备等组成[1,2]。因此,针对长定子直线同步电机的高性能控制是高速磁浮交通的核心关键技术。
高速磁浮用长定子直线同步电机的励磁磁极兼有悬浮磁极的作用,其中悬浮电磁铁中的电流就是励磁磁极电流。为了保持悬浮气隙恒定,实际中励磁电流的控制不是由牵引控制系统来完成的,而是由悬浮控制系统调整和控制的。因此,从悬浮系统的控制目标来看,希望定子电流的电枢反应对悬浮力的影响越小越好,即定子电流直轴分量理想值为0;从牵引控制系统来看,励磁电流变化太大会影响磁浮列车的牵引性能,所以一般希望励磁电流基本保持不变。虽然直接转矩控制(DTC)可以获得较快的转矩动态响应[3],但是,DTC无法实现定子磁场在列车悬浮磁场方向分量为0,会对列车悬浮力产生干扰,故DTC控制策略不适合高速磁浮交通。综上分析可知,励磁电流恒定且d轴轴向电流为零的转子磁场定向控制方式,适合作为高速磁浮列车用长定子直线同步电机的牵引控制策略[4]。
当磁浮列车高速运行时,为了降低单个变流器的输出容量并保证供电的可靠性,会采用双端供电模式,即由位于线路两端的两个变流站同时为车辆供电。与常见的单变流器供电的直线电机牵引系统相比,该供电模式下的车辆模型具有一定的特殊性。此外,由于馈电电缆供电距离较长,其等效电感和电阻不可忽略,这也使得双端供电模式下电机的数学模型更加复杂。因此,如何建立该模式下电机的数学模型和设计相应的控制策略是一个值得研究的问题。
针对上面提出的问题,本文首先建立了双端供电模式下的长定子直线同步电机数学模型,并在此基础上提出了相应的牵引控制策略。最后,通过Simulink仿真和基于硬件在环的实时仿真平台,验证了本文提出的控制策略的有效性。
2 双端供电工作模式
高速磁浮列车的牵引供电系统的结构如图1所示。牵引变电站负责为定子段供电,并根据列车的实际运行状况采用不同的供电模式。实际运行中有两种供电模式:①单端供电模式,即由一个牵引变流站通过轨旁馈电线路向电机供电;②双端供电模式,即由线路两端的两个牵引变流站通过轨旁馈电线路同时对电机供电。

图1 磁浮交通牵引系统结构Fig.1 Structure of high speed maglev propulsion system
采用双端供电的模式,是因为当列车运行到高速并且需要较大加速度时,一端变流站包含的两台15MV·A变流器的电流承受能力往往不能够满足实际的牵引需求,此时需要两端变流站并联运行为车辆供电。
采用双端供电模式有很多优点,首先,此种模式有四台15MV·A逆变器同时为磁浮列车供电,因此,可以提供足够大的牵引力,保证足够高的爬坡和加速能力。这样,每个变流器单元的容量就不必很大,可以降低其设计和制造难度。其次,双端供电模式也可以较为明显地降低馈电线路损耗。另外,双端供电模式也使得列车在实际的运行过程中,具有一定的安全冗余性,即当一端的变流站出现故障退出运行时,可以通过另外一端的变流站供电来保证车辆继续运行。因此,有必要对双端供电模式下磁浮列车的建模及控制等新问题展开研究。
2.1 双端供电模式下直线同步电机的数学模型
双端供电模式下长定子直线同步电机是由轨道两端的变流站通过各自的馈电电缆并联汇流后,向轨道两侧定子绕组段供电,相当于有两台相同的长定子直线同步电机同时工作。这时,对一台电机可以建立静止坐标系下A相等效电路,如图2所示。其中Lo1、Lo2、Rk1、Rk2为馈电电缆的等效电感和电阻,ris表示列车磁极覆盖部分的定子电阻,ros表示列车磁极未覆盖绕组的电阻。

图2 双端供电长定子直线电机A相等效电路Fig.2 Equivalent circuit of phase A of LSM with double-end supply
由图2建立A相数学模型如式(1)所示:

式中,R=ris+ros。将式(1)扩展到ABC三相,并写成矩阵形式:

式中,U1=[ua1ub1uc1]T;I1=[ia1ib1ic1]T;U2=[ua2ub2uc2]T;I2=[ia2ib2ic2]T;ψ=[ψaψbψc]T。
为了消除时变电感带来的复杂性,将ABC坐标系的等效电路和微分方程转换到d-q坐标系,采用幅值相等转换原理,转换矩阵为:

d-q坐标系下双端供电模式的等效电路如图3所示。
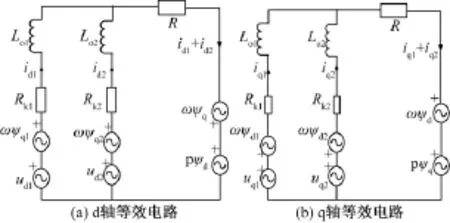
图3 双端供电长定子直线电机d-q轴等效图Fig.3 Double-end powered LSM equivalent circuit on d-q system
根据图3所示的d-q轴等效电路列写电路微分方程,并整理成状态方程形式:

式中

Ld、Lq为定子绕组在d-q坐标系下的电感;τ为极距; v为列车速度;Msm为转子与定子间的互感,im为励磁电流;id、iq为定子电流在d-q轴的分量;id1、iq1为第一台15MV·A变流器输出电流在d-q轴的分量; ud1、uq1为第一台15MV·A变流器的输出电压在d-q轴的分量;id2、iq2、ud2、uq2为对应第二台15MV·A变流器的量。
由式(4)可见,这是一个强耦合的系统,每台变流器电流不仅与自身交叉耦合的电流和电压相关,还与另外一台变流器的电流、电压以及电机励磁电流相关,这就加大了控制难度。
2.2 双端供电的控制策略
由于长定子直线同步电机与传统的直线电机不同,其励磁磁极同时也作为悬浮磁极,励磁磁极里的电流由悬浮控制系统确定,牵引控制系统不能控制励磁电流的大小,因此为了避免对列车悬浮磁场产生影响,选用d轴电流为0的转子磁场定向控制作为长定子直线同步电机的控制策略[5-7]。此控制方法共包含三个控制环,由外到内分别是位置环、速度环和电流环,控制框图如图4所示,控制方程为:



图4 双端供电长定子直线同步电机控制框图Fig.4 Diagram of vector control system for LSM based on double-end supply
通常从抑制并联环流的角度考虑,希望两台15MV·A变流器输出电流的相位、幅值、频率保持一致,因此,令
但是由于高速磁浮车是一个大惯量系统,并且考虑列车要按照给定的速度曲线运行,只靠PI调节器无法满足列车高速稳定运行的要求,因此,本文提出了一种加入速度环和电流环前馈的方法,来提高控制的精度。
(1)速度环前馈
文献[4]给出的磁浮车在d-q坐标系下的牵引力方程为:

磁浮车的阻力方程为:

列车的动力学方程为:
究竟用什么焊条才能保证接头的强度和焊缝的严密性,又能保证焊道有良好的背面成型?由焊接工程师黄显炳领导的焊接技术小组反复研究,先选定结426、结427、结506等低氢型焊条及上海产的结422酸性焊条,进行工艺性能对比试验。

磁链方程为:

式中,ψd、ψq为定子磁通分量;FX、FZ为牵引力和阻力;m为列车质量;N为车厢数量;ψf为等效的转子磁通。
在实际控制中,由事先设定的列车速度曲线可以得到给定的加速度,由式(10)和式(11)可以得到列车需要的牵引力,进而可由式(9)和式(12)求得需要的iq。双端供电模式下,此iq为两端两台15MV·A变流器并联输出的电枢q轴电流和,此电流为速度环的输出电流的前馈。
(2)电流环前馈和解耦补偿
由图3可以得到电压方程为:

从式(13)可以看出,电压方程等号右侧前三项是电机的电压方程,后三项为电缆对于电机的影响,因此在电流环前馈控制中,需要对电机和电缆分别进行补偿。
忽略微分项,根据式(13)可得到前馈补偿公式为:

此外通过式(13)可以看出,d轴电压与q轴电流存在耦合项。因此在补偿的算法中,可以按照式(15)加入解耦项:

3 仿真分析
为了验证本文提出的数学模型和控制策略的准确性和有效性,在Simulink中搭建了长定子同步直线电机双端供电的模型并进行了仿真分析,LSM参数如表1所示,电缆参数如表2所示。

表1 长定子直线同步电机的模型参数Tab.1 Parameters of LSM

表2 供电电缆参数Tab.2 Parameters of feeding cable
3.1 不加前馈纯PI控制
仿真条件为:不加前馈,单纯靠PI来控制车辆运行。采用的给定速度曲线是与上海磁浮运营线相同、最高500km/h的时速运行曲线,仿真结果如图5所示。图中虚线为给定曲线,实线为实际曲线。

图5 纯PI控制下的仿真结果Fig.5 Simulation results with PI control
通过图5(a)可以看出,在此仿真条件下,实际列车的运行速度跟不上给定速度,控制效果较差,不能达到高速列车稳定安全运行的要求。因此,改进控制策略是很有必要的。
3.2 只加入前馈不加解耦
仿真条件为:加入本文提出的电流环和速度环前馈,按照与3.1节相同的系统参数进行仿真,结果如图6所示。图中虚线为给定曲线,实线为实际曲线。

图6 加入前馈补偿的仿真结果Fig.6 Simulation resultswith feedforward
对比图5(a)和图6(a)可以看出,加入前馈补偿的控制,能够明显改善控制效果,高速磁浮列车能够稳定地按照给定曲线运行。
3.3 同时加入前馈和解耦补偿的仿真
仿真条件为:按照本文中提出的解耦补偿公式,在3.2节的基础上加入解耦补偿,采用相同的系统参数进行仿真,结果如图7所示。图中虚线为给定曲线,实线为实际曲线。

图7 加入前馈和解耦补偿后的仿真结果Fig.7 Simulation results with feedforward and decoupling compensation
对比图6(b)和图7(b)可以看出,加入解耦补偿之后,id的波动减小,iq的跟踪效果更好,表明了加入解耦补偿能够明显改善控制效果。
4 半实物仿真实验
半实物仿真平台属于硬件在环的实验,该平台的控制器为真实的控制器,变流器和电机为Simulink开发的、运行在dSpace实时仿真机的数学模型,控制器和实时仿真机通过数字和模拟接口,实时下发控制指令和反馈电压电流信号。相比与纯仿真分析,半实物仿真实验更加接近真实情况[8-10]。
在半实物仿真平台上按照上海28km高速磁浮示范线最高500km/h时速的运行条件,采用本文提出的控制策略进行试验,实验结果如图8所示。
通过图8可以看出,列车能够按照给定的速度曲线稳定运行,由此说明了控制策略的正确性。
5 结论
本文以高速磁浮交通牵引系统为研究对象,首先提出了在双端供电模式下的长定子直线同步电机的数学模型,然后基于转子磁场定向的控制构建了包含位置环、速度环和电流环的长定子直线同步电机控制策略。为达到较好的控制效果,引入了速度环和电流环前馈,并加入电流环解耦的补偿方法。Simulink仿真分析和半实物仿真实验表明,本文提出的牵引控制策略是有效可靠的,可以保证高速磁浮交通列车的安全稳定运行。

图8 500km/h全程运行曲线Fig.8 500km/h speed curve
[1]吴祥明(Wu Xiangming).磁悬浮列车(Maglev train)[M].上海:上海科学技术出版社(Shanghai:Shanghai Sciences and Technology Press),2003.
[2]李耀华,葛琼璇,韦榕,等(Li Yaohua,Ge Qiongxuan,Wei Rong,et al.).“十一五”国家科技支撑计划课题“高速磁浮交通技术攻关与创新研究”(2007BAG02A04)研究报告(Research report of the national key technology R&D program for high speedmaglev transport system(2007BAG02A04))[R].北京:中国科学院电工研究所(Beijing:Institute of Electrical Engineering,Chinese Academy of Sciences),2011.
[3]史涔溦,邱建琪,金孟加,等(ShiCenwei,Qiu Jianqi,Jin Mengjia,etal.).永磁同步电动机直接转矩控制方法的比较研究(Study on the performance of different direct torque controlmethods for permanentmagnet synchronousmachines)[J].中国电机工程学报(Proceedings of the CSEE),2005,25(16):141-146.
[4]王娟(Wang Juan).悬浮用长定子直线同步电机特性研究与故障分析(Research on the characteristics ofmaglev long-stator linear synchronousmotor and short-circuit malfunction)[D].北京:中国科学院电工研究所(Beijing:Institute of Electrical Engineering,Chinese A-cademy of Sciences),2004.
[5]BWu.High-power converters and AC drives[M].New York:Wiley-IEEE Press,2006.
[6]殷正刚(Yin Zhenggang).大功率三电平逆变器脉宽调制及磁场定向控制的研究(Research on the pulse width modulation strategies and field-oriented control for high power three-level inverter)[D].北京:中国科学院电工研究所(Beijing:Institute of Electrical Engineering,Chinese Academy of Sciences),2012.
[7]王成胜,李崇坚,李耀华,等(Wang Chengsheng,Li Chongjian,Li Yaohua,etal.).7.5MVA大功率三电平IGCT交-直-交变流器(Research on three-level AC-DCAC converter equipped with IGCTs)[J].电工技术学报(Transactions of China Electrotechnical Society),2007,22(8):24-27.
[8]李洋,史黎明,李耀华(Li Yang,Shi Liming,Li Yaohua).直线同步电机牵引系统实物在环实时仿真算法(Hardware-in-loop platform for high-speed maglev traction system)[J].电工技术学报(Transactions of China Electrotechnical Society),2013,28(S1):363-370.
[9]SAbourida,JElanger,CDufour.Real-time HIL simulation of a complete PMSM drive at10/splmu/s time step[A].2005 European Conference on Power Electronics and Applications[C].2005.9.
[10]C Fan,Y Fang,Y Ye,et al.State spacemodel and simulation of long stator linear synchronousmotor in maglev vehicle[A].Proceedings of IEEE Intelligent Transportation Systems[C].2003.2:1482-1485.
(,cont.on p.44)(,cont.from p.21)
Traction-system research for high-speed maglev based on double-end supply
LIU Jin-xin1,2,GE Qiong-xuan1,WANG Xiao-xin1,CUIDong-dong1,2
(1.Key Laboratory of Power Electronics and Electric Drive,Institute of Electrical Engineering,Chinese Academy of Sciences,Beijing 100190,China;2.University of Chinese Academy of Sciences,Beijing 100039,China)
The double-ended power supplymode is one of the importantmodes for high-speedmaglev train.In this mode the length of the feeding cable cannot be ignored.Therefore,themathematicalmodel of the long stator linear synchronousmotor ismore complicated.This paper proposes the accurate mathematicalmodel for the train in the double-ended power supplymode.The corresponding traction control strategy for thismode is also presented,which contains position loop,speed loop and current loop.The control strategy also contains the feedforward and decoupling compensation methods.By comparing the operating results of the high-speedmaglev train under different control conditions through Simulink simulation,the results show the correctness of the control strategy.In this paper,the double-ended power supply control strategy will also be used in the hardware-in-loop real-time simulation platform.The testing results show that the control strategy can fulfill the stable operation of the high-speed maglev train.
high speed maglev;double-end power supply;feedforward;decoupling control;hardware-in-loop
TM46
A
1003-3076(2015)06-0016-06
2015-01-14
“十二五”国家科技支撑计划课题“高速磁浮交通工程化集成系统研究”(2013BAG19B01)资助项目
刘金鑫(1985-),男,回族,河南籍,博士研究生,研究方向为大功率直线电机与驱动控制;葛琼璇(1967-),女,江西籍,研究员,博士生导师,研究方向为大功率直线电机与驱动控制(通信作者)。
猜你喜欢
防爆电机(2020年6期)2020-12-14
山东工业技术(2016年15期)2016-12-01
光学精密工程(2016年3期)2016-11-07
电测与仪表(2016年8期)2016-04-15
通信电源技术(2016年4期)2016-04-04
通信电源技术(2016年5期)2016-03-22
核科学与工程(2015年2期)2015-09-26
大电机技术(2015年5期)2015-02-27
电测与仪表(2014年13期)2014-04-04
组合机床与自动化加工技术(2014年12期)2014-03-01
