
光电跟踪系统稳定精度测试方法研究
2015-06-01 03:38王科伟王小怡刘召庆王生让张魁甲
应用光学 2015年1期
王科伟,王小怡,王 晶,刘召庆,王生让,张魁甲
(1.总参陆航部驻西安应用光学研究所军事代表室,陕西 西安710065;2.西安应用光学研究所,陕西 西安710065)
引言
光电跟踪系统主要有瞄准线稳定系统、侦察系统、夜间飞行导航系统等。其中稳瞄系统最复杂,并且其性能和精度最高。稳瞄系统用于隔离载机(直升机、车辆等)振动所引起的图像晃动,保证光电传感器的分辨率和输出图像的稳定性。该类设备最重要的性能指标是稳定精度,可通过载机振动的隔离残差表征。通常,用于瞄准的稳瞄系统只需稳定方位和俯仰2个轴,横滚方向不需要稳定。按结构形式划分,稳瞄系统可分为两轴两框架系统和两轴四框架系统,两轴两框架系统的稳定精度一般约为100μrad;两轴四框架系统的稳定精度范围可达20μrad~40μrad。未来发展方向是采用粗精组合稳定方式,其精度可达5μrad~10μrad[1-5]。针对光电跟踪系统稳定精度测试需求,提出一种稳定精度动态测试方法。该测试方法根据光学自准直原理,搭建稳定精度测试平台。由安装于被测光电跟踪系统上的反射镜反映系统的振动状态,通过反射镜反射光束至CCD探测器,将被测系统μrad级的角位移变化放大并转换成光电探测器光敏面上可检测的光斑位置变化,结合图像质心算法对图像数据进行处理,最终获得系统稳定精度指标。
1 测量原理
光电跟踪系统稳定精度指标通常具有小的角度范围和高的测量精度要求,根据此属性,该测量系统采用了光学自准直原理,测量系统光路图如图1所示,光线通过位于物镜焦平面的分划板后,经物镜形成平行光。平行光被垂直于光轴的反射镜反射回来,再次通过准直镜头后由分光棱镜转折汇聚在位于共轭焦平面的CCD表面,形成分划板像。当反射镜倾斜一个微小角度时,反射回来的光束就产生一个倾角,位于CCD探测表面的分划板像就产生一个位移。通过CCD对分划板像位移的判读就可以得知反射镜的角位移。
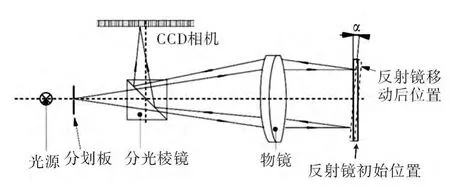
图1 测量系统光路图Fig.1 Optical path of measurement system
测量原理示意图如图2所示。
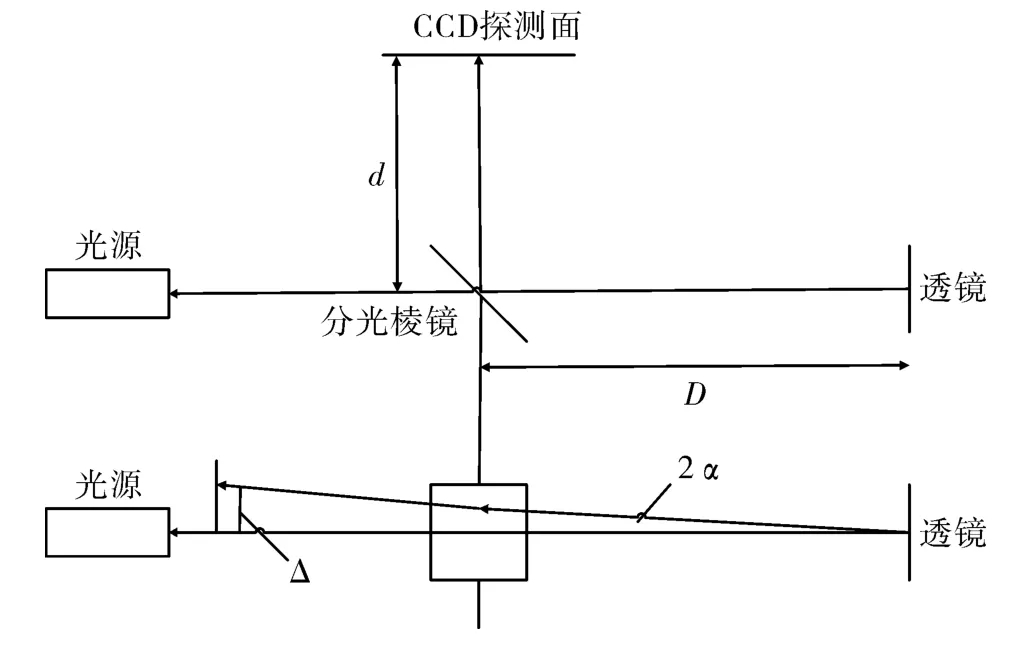
图2 测量原理示意图Fig.2 Schematic diagram of measurement
分光棱镜与反射镜之间的距离为D,分光棱镜与CCD探测面之间的距离为d,为便于说明,图中将分光棱镜的反射光线沿平面镜的反射光路方向展开,经稳定平台稳定后的反射镜角度改变为α,由此引起的CCD面上光斑的改变量为Δ,由图中容易看出:

因为α很小,所以有:

式中D,d均是可以根据光路布置确定的常数,所以被测稳定平台的稳定精度α可以从CCD上的光斑偏移量Δ计算得出。
测试一个时间历程,通过测量CCD靶面上的光斑偏移量Δ,可得到光电跟踪系统的稳定精度测试结果σ。
2 测量系统
测量系统由高速动态自准直仪、测试用计算机、测试软件和光源组成,稳定精度测试系统示意图如图3所示。光源使用LED光源。高速动态自准直仪发出一束光,被置于稳瞄光具座上的反射镜返回后成像在探测器上,反射光偏转,则反射角度偏转2倍,探测器通过测量其上光学像的位置变化,能够获得反射角度,通过软件对该角度进行统计计算,可获得系统的稳定精度。
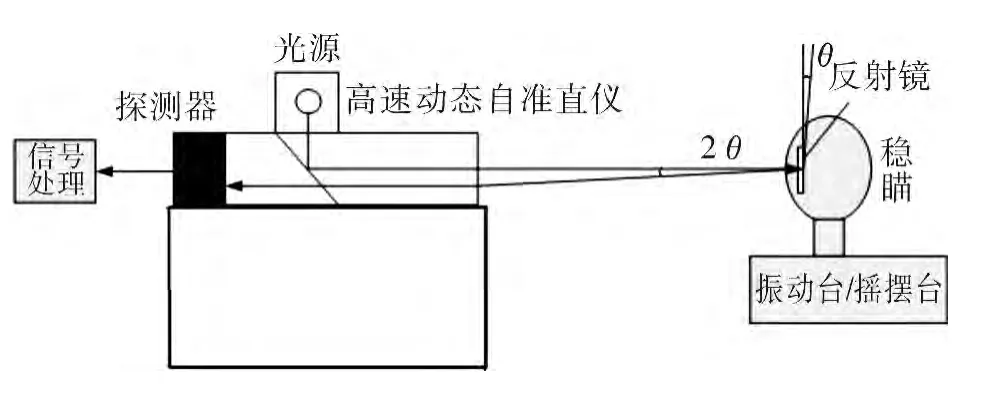
图3 稳定精度测试系统示意图Fig.3 Framework for testing stability accuracy
2.1 高速动态自准直仪
根据测量系统方案,初步选定西安光衡光电科技有限公司的高速动态自准直仪,并针对系统的特性进行改进设计。此高速动态自准直仪使用了线阵CCD作为探测器,在对光电稳定跟踪系统进行测量时,线阵CCD是对方位和俯仰分别进行测量的。线阵CCD先对方位进行测量,如果出现俯仰偏转,这时线阵CCD是探测不到数据的,再对俯仰进行测量时如若出现方位的偏转,线阵CCD也是无法探测到的。基于此种原因,必须将线阵CCD更换为面阵CCD。该装置改用了1/2英寸(1.27cm)格式大面阵CCD探测器,型号为FTM50,具有高分辨率、高感光度,抗晕性能好等特点。FTM50型CCD的主要性能参数如表1所示。
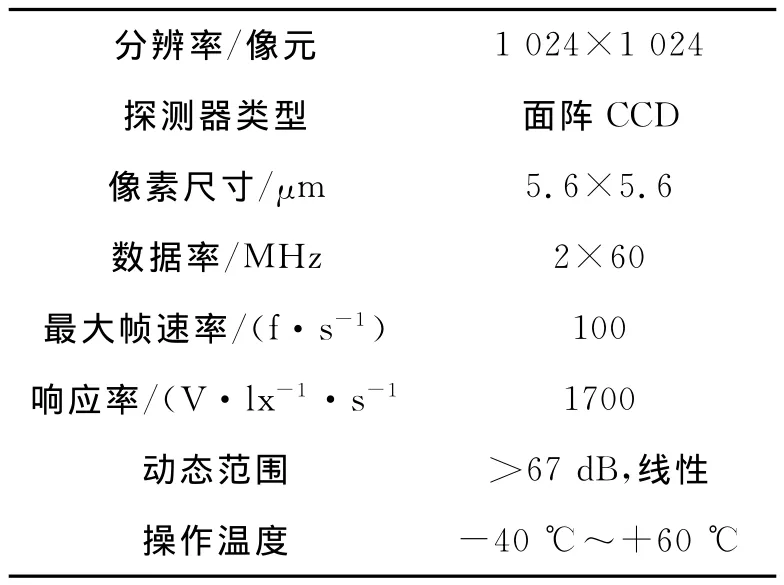
表1 CCD产品(FT50M)相关特性参数Table 1 CCD-related(FT50M)parameters
从表1可知,FT50M的像素尺寸为5.6μm×5.6μm,高速动态自准直仪器的焦距是200mm,结合测量精度要求,根据(3)式得到:

可以看到FT50M探测器达到14μrad级,再经过图像处理之后会更小。本文针对两轴两框架稳瞄系统的稳定精度测试需求开展研究工作,两轴两框架系统的稳定精度通常在50μrad~100 μrad之间,稳定精度按50μrad考虑,所以 远小于50μrad,此探测器满足要求。
2.2 信号处理
信号处理流程如图4所示。
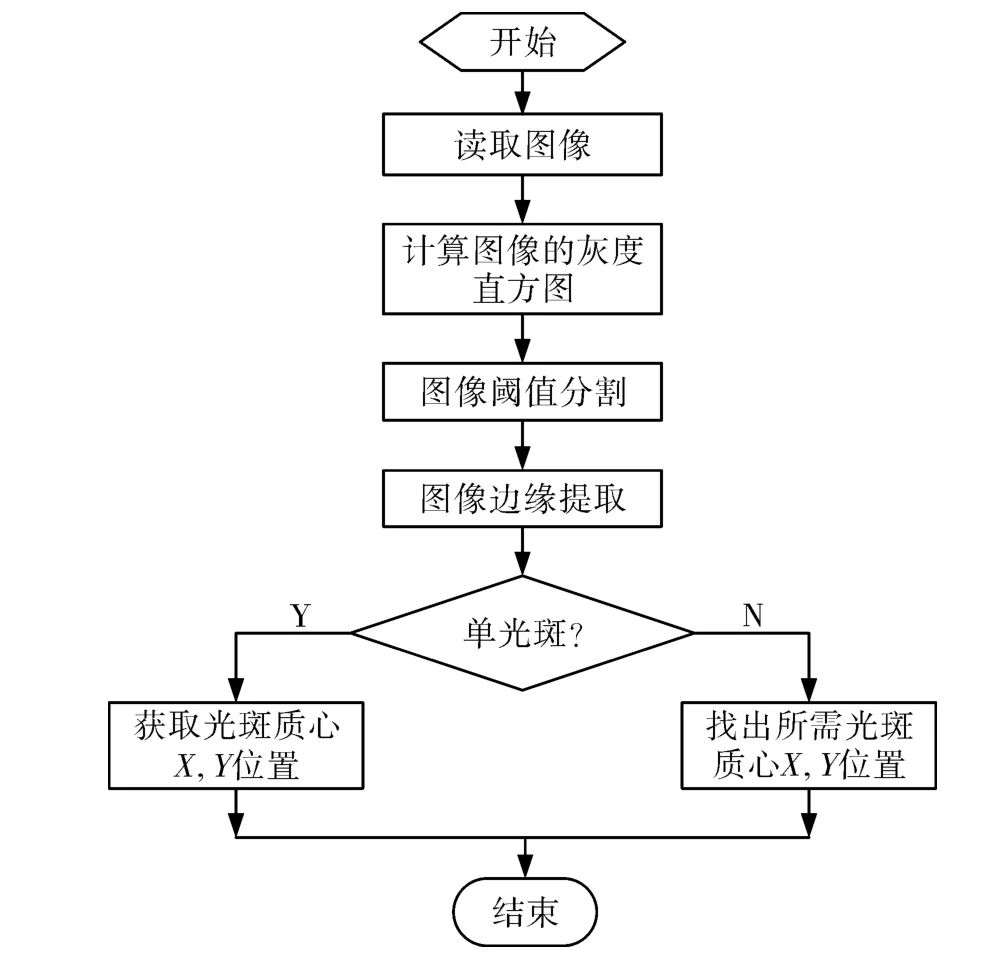
图4 信号处理流程图Fig.4 Flow chart of signal processing
质心法图像预处理算法一般包括:灰度值的计算、图像半阈值化、图像边缘提取,最后根据质心法计算质心。
1)计算图像灰度值
对应于每个灰度值,求出图像中具有该灰度值像素数的图形叫做灰度值直方图。直方图是表达图像灰度级分布情况的统计表,但直方图不提示像素的具体位置。由于直方图能够直观地表征图像特性的信息,因此在图像处理中起着非常重要的作用,可以用来作为图像数字化的参数和确定分割图像阈值的依据。
2)图像半阈值化
半阈值法,即将灰度级低于某一阈值的像素灰度变换为0,而其余的灰度级不变,仍保留原来的灰度值[6-7]。其处理方法如下:
全局阈值是根据整幅图像f确定的:

式中B为图像阈值。
设图像目标为I,I中的每一个像元I(i,j)与阈值B相减,结果大于B值的像素灰度保持不变。结果小于B 值的为“0”。设f(i,j)=I(i,j)-B,则有:

3)图像的边缘检测
图像边缘提取是测量的基础和关键。首先,对经过半阈值化处理后的图像生产一幅矩阵数据表;随后,对这幅图表在X和Y方向各进行一次卷积,采用的算子为一种较为常用的Sobel算子,图5所示为Sobel算子,得到两组数据表;再将这两组数据进行相应取最大值运算,可用公式表示如下:

式中:(i,j)为数据表中的X和Y方向相应单元格坐标;fX(i,j),fY(i,j)分别为第一和第二组数据表中(i,j)处的数据。

图5 Sobel边缘检测算子Fig.5 Sobel edge detection operator
最后,查找到的一个最大的f0(i,j)必为边缘像素,取以f0(i,j)中心的3像素×3像素为单元,对比f0(i,j)周边值,找到其中的最大值作为下一个边缘点。如此下去,直到边缘封闭为止。
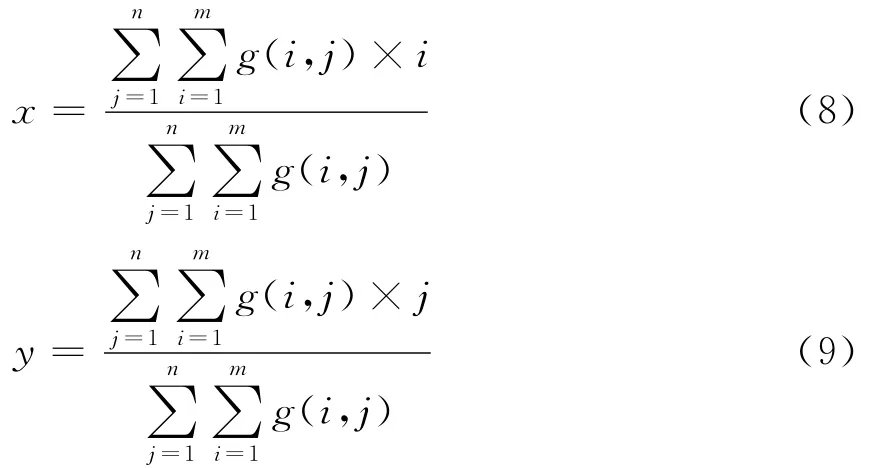
4)质心算法
本文采取传统质心求取算法。图像质心即图像灰度的重心,设图像有i,j两个方向,m,n分别为i,j方向像素的数量,g(i,j)为像素点(i,j)处的灰度值,则图像质心位置坐标表达式如下:
3 试验结果
首先将自准直仪、计算机、电源等部件连接,并将反射镜粘贴在被测系统上。其次,测试前行初始对准时,必须通过调节安装夹具使红光激光束大致入射在测试反射镜几何中心位置,以保证测试过程中入射光点始终落在测试镜上,同时保证经过测试反射镜反射后的光点落在高速动态自准直仪CCD光敏面的中心点位置附近,以确保测试光点的晃动落在器件线性度较好的区域。
对某型光电跟踪系统在室内进行动态稳定精度的测量,并对其数据进行处理。对采集数据的处理分析:首先对测量的图像数据进行了质心的求取;其次将所有图像的质心作了线性拟合,并对其进行去漂移过程;再次,将处理的结果作了一个均方根的计算,得出稳定精度,试验数据如表3所示。
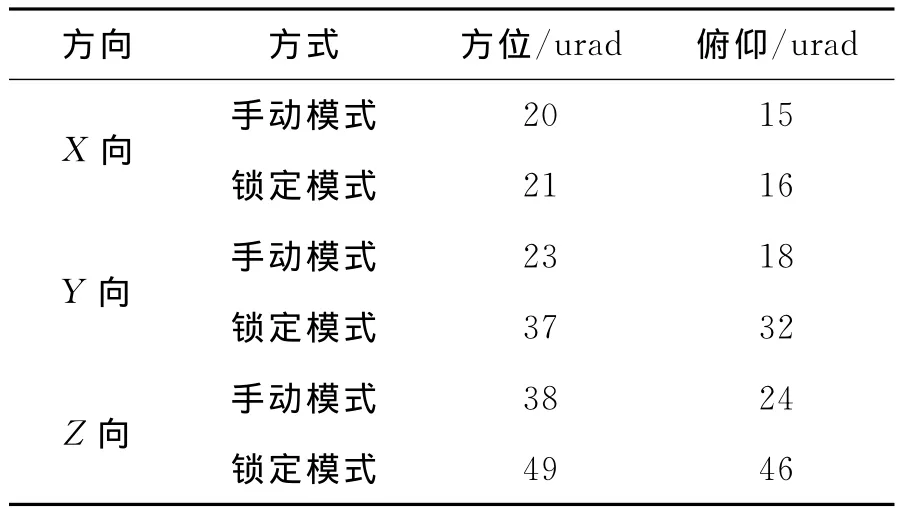
表3 结果数据表Table 3 Datasheets of result
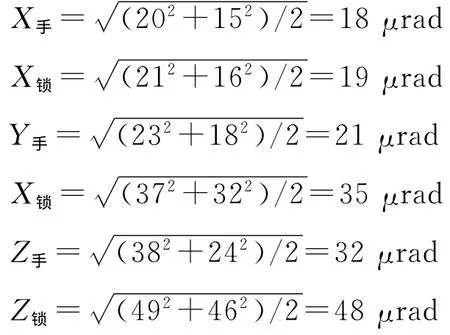
将各个方向两种工作模式下的方位和俯仰进行均方差处理,即可以看出系统分别在X,Y,Z向的两种工作模式下的稳定精度:
4 结论
本文提出一种以光学自准直原理为主要技术的稳定精度测试方法,完成了基于光学自准直技术的测试研究。从实验结果可以看出,测试50μrad级两轴两框架系统的稳定精度,测出最大稳定精度为48μrad,所以本测试系统能满足50μrad级两轴两框架系统的动态稳定精度测试需求。
[1] Ji Ming.Research on high accuracy stabilization technology for integrated multi-spectrum electro-optical system[J].Journal of Applied Optics,1996,17(3):55-60.纪明.多频谱光电综合系统高精度稳定技术研究[J].应用光学,1996,17(3):55-60.
[2] Lu Peiguo,Shou Shaojun.High accuracy tracking technology and its application in ship-borne electrooptical system[J].Journal of Applied Optics,2009,16(11):21-23.陆培国,寿少峻.舰载光电系统高精度跟踪控制技术[J].应用光学,2006,27(6):480-483.
[3] Li Zhiqiang,Xu Zhaolin,Xu Jingshuo.Airborne electrooptical tracking control system design platform[J].Electronics Optics & Control,2009,16(11):21-23.黎志强,徐兆林,徐景硕.机载光电跟踪平台的控制系统设计[J].电光与控制,2009,16(11):21-23.
[4] Liu Zhongjie.Military optical systems development review[J].Laser Technology,2009,32(4):28-32.刘中杰.军用光电系统发展综述[J].激光技术,2009,32(4):28-32.
[5] Chen Xilin,Fu Yusong,Yu Xunkai.Status airborne electro-optical targeting system and development[J].Infrared Technology,2004,26(2):52-55.陈希林,傅裕松,尉洵楷.机载光电瞄准系统的现状及发展[J].红外技术,2004,26(2):52-55.
[6] Xu Yan.Threshold segmentation method of micro-scopic image[J].Journal of Applied Optics,2010,31(5):745-747.许艳.显微图像阈值分割算法的研究[J].应用光学,31(5):745-747.
[7] Milan Sonka,Vaclav Hlavac,Roger Boyle.Image processing,analysis,and machine vision[M].Beijing:Tsinghua University Press,2011.
[8] Wu Zhengyi.Test technology and testing signal processing[M].Beijing:Tsinghua University Press,1991.吴正毅.测试技术与测试信号处理[M].北京:清华大学出版社,1991.
[9] Bristow M P,Bundyd D H.Signal linearity,gainsta-bility,and gating in photomultiplier[J].Application to Differential Absorption Lidars,1995,34(21):4437-4452.
[10] Bristow M P.Lidar signal compression by photomutiplier gain modulation influence of detector nonlinearity[J].Application to Differential Absorption Lidars,1998,37(27):6468-6479.
[11] Concannon B,Contarino V M,Curran T P.Adjustable dynamic signal compression by photomultiplier space charge control[J].SPIE,1990,1302:421-432.
[12] Billard B,Wilson P J.Sea surface and depth detection in the wrelads airbone depth sounder[J].Applied Optics,1986,25(13):2056-2066.
猜你喜欢
新能源科技(2022年9期)2022-11-20
汽车实用技术(2022年14期)2022-07-30
北京航空航天大学学报(2022年6期)2022-07-02
北京航空航天大学学报(2021年4期)2021-11-24
天津医科大学学报(2021年1期)2021-01-26
环境技术(2020年1期)2020-03-06
自动化学报(2017年5期)2017-05-14
应用科技(2015年5期)2015-12-09
中国光学(2015年1期)2015-06-06
遥测遥控(2015年2期)2015-04-23
