
微光全景光学系统设计
2015-06-01 03:38杨子建张宣智
应用光学 2015年1期
杨子建,胡 博,张宣智,刘 峰,闫 磊
(1.西安应用光学研究所,陕西 西安710065;2.微光夜视技术重点实验室,陕西 西安710065)
引言
微光成像系统是一种利用光增强技术的光电成像系统,它可以大大改善人眼在微光下的视觉性能。传统的微光成像光学系统一般遵循中心投影法,只能对较小的视场成像,由于其局限性,在任何一个视点处所获取的信息是孤立的某个有限空间部分。在某些特殊场合,为了实现对周围整个场景信息的整体获取,引入微光全景成像,通过采用特殊的全景成像装置,获取水平方向360°、垂直方向一定角度的视场。
当前实现全景成像的方法主要有3类:1)旋转与拼接全景成像。旋转成像需要精确的旋转运动控制部件及复杂的算法,多摄像机拼接成像图像配准困难,而且这种成像方式成本高,系统复杂[1];2)鱼眼全景成像。鱼眼镜头具有很短的焦距,视场角接近甚至超过180°,但这种成像存在较大的图像畸变,且其畸变模型不满足透视投影条件,无法从所获取的图像中映射出无畸变的透视投影图像,同时视场角越大,光学系统越复杂,造价越昂贵,并且视场角变弯,物像对应关系复杂,补偿困难[2-3];3)折反射全景成像。根据反射次数分为单反射面折反全景成像和多反射面折反全景成像,比较典型的折反全景成像代表是P.Greguess在1986年提出的全景环形透镜成像(panoramic annular lens)。本文结合微光成像及全景成像的技术特性[4-6],选择折反射全景成像方法。
1 设计指标
微光全景成像光学系统设计指标为
工作波段:0.4μm~0.9μm
F#: 1.5
水平视场:360°
垂直视场:30°~100°
探测器: 二代半像增强器(φ18mm)
2 设计方法
微光全景成像光学系统的基本特点是大视场、短焦距,根据这个特点我们可以把此类光学系统归为反远距光学系统,其初始结构的一阶参数计算可以据此展开[7]。
如图1所示,系统由前组(前置反射镜组)和后组(中继系统)构成。由于微光系统用于低照度情
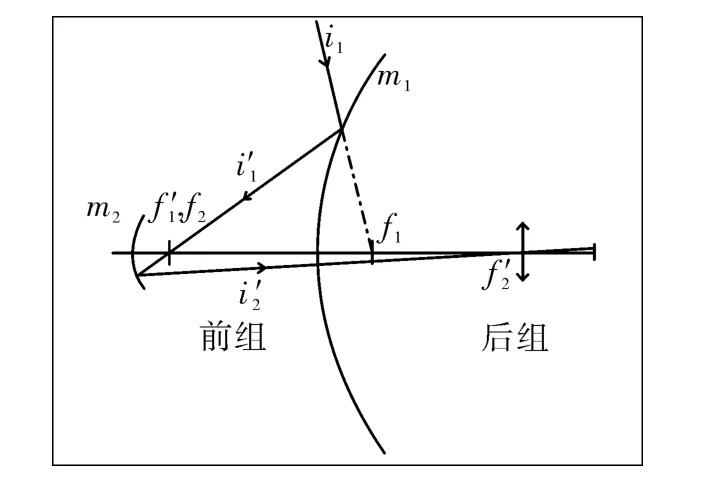
图1 光学系统结构Fig.1 Structure of optic system
况下,设计中需要相对较大的口径,且光谱波段宽,因此设计中选择前组由纯反射光学元件构成,这样不但有利于降低光学系统能量损耗,而且由于反射光学元件不引入色差,便于整体系统的色差校正。该前置反射镜组由两片二次曲面反射镜m1和m2构成,系统光阑位于中继透镜组上。由公式(1)~(3)可知,对一定的入瞳直径(取规划值1)及一定的系统F#,前组焦距fm或前组F#m与后组(中继系统)的垂直放大率β成反比,再者考虑到像差的校正,一般取β的绝对值小于1,具体取值需综合权衡。


式中:p表示匹兹伐半径;φ表示元件光焦度;n为材料折射率。
由像差分析可知,对后组一定的入射角而言,前组的角放大率越小,则其视场角越大,与其相关的像差(尤其是畸变)将急剧增加;另一方面,由于系统光阑位于后组上,后组产生的畸变为零,后组产生的一定像散只能通过前组补偿,故前组在初始设计阶段要考虑像散与畸变的校正问题。对后组而言,后组可以补偿消除前组的球差、彗差、场曲,由于前组为纯反射光学面不产生色差,后组要求单独消除色差,考虑使用胶合透镜。此外,由于前组的角放大率很小,负光焦度很大,产生很大的负场曲,因此要求后组存在正场曲与之平衡,后组可以采用正透镜分离的形式,并且由上述公式可知,对一定的正光焦度而言,其折射率越低越好,而负光焦度情况则与之相反。
为了降低前组像散与畸变,根据像差理论分析可知,只要能控制主光线最大入射角度,就能很好地控制前组的像散与畸变,经进一步分析可知,起主要作用的为反射面m1。
为了合理选择二次反射曲面,设计过程中推导了角放大率α与二次项系数k及入射光线与光轴夹角u之间的关系式,本文以双曲面为例进行阐述。如图2所示,由解析几何[8]可知,对双曲面面型的反射面m1而言,存在如下关系:
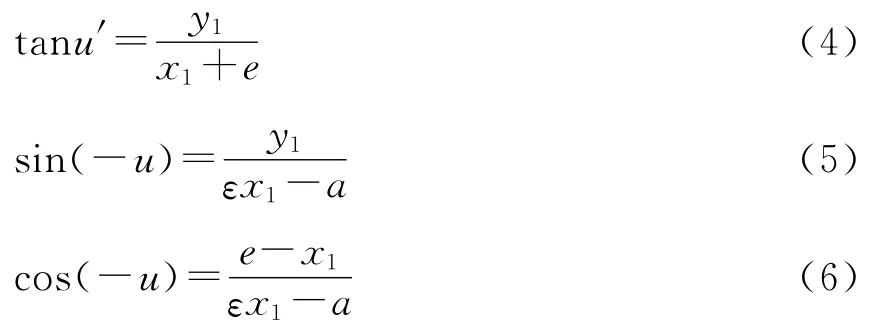

图2 双曲线的几何关系图Fig.2 Geometric property of hyperbola

此式对其他二次曲面面型的反射面同样成立,故第一个反射面m1的角放大率及入射角可分别表示为
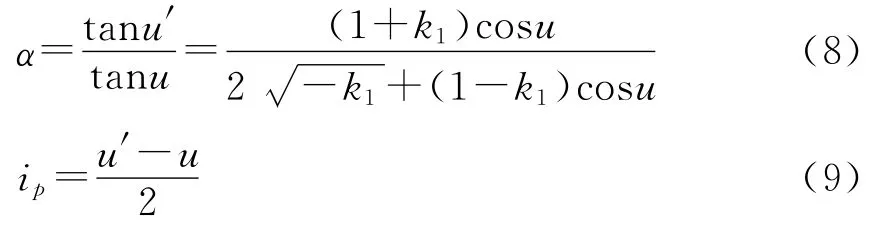
对整个前组而言,其角放大率可表示为

式中,前组等效二次项系数

当入射角一定时,整个前组角放大率α与k值之间存在固定的对应关系,故而第一反射镜m1的二次项系数k1与第二反射镜m2的二次项系数k2的取值关系要满足(11)式所对应的k值要求。此外,前组角放大率取值要考虑后组的因素,本文中最大视场角取100°,考虑到后组的承受能力,角度放大率取值-0.3。由公式(10)可知,此时k为-1.4,对应的k1与k2之间关系如图3所示:
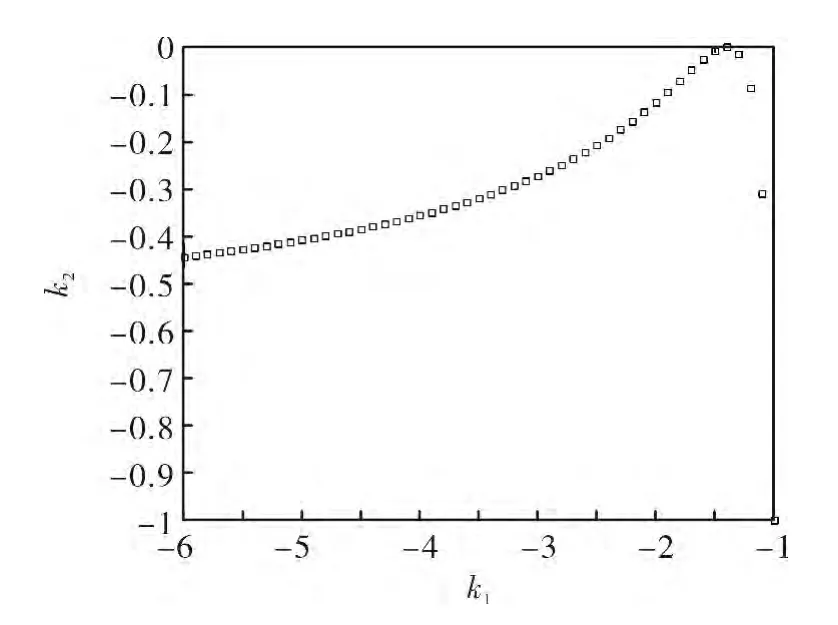
图3 k1与k2关系图Fig.3 Relationship between k1and k2
由图3可知,k1值的选取对m1面的影响突出,若反射面m1为双曲面,则反射面m2为椭球面,考虑到整个系统结构尺寸,需要在初始设计阶段合理取值。以反射面m1的二次项系数k1为自变量定性分析,则反射面m1对应的反射光线与光轴夹角u′、角放大率α、最大入射角ip的变化规律如图4所示。
为了确定前组结构,还需要结合其场曲的校正要求确定二次曲面顶点曲率半径R1、R2、结合二次曲面反射镜的共焦性质确定其顶点间间隔d12及中继系统的入瞳位置(以其与主反射镜的距离表示)dp。具体计算公式分别表示为
根据以上分析可以看出,整个系统第一反射镜的尺寸最大,为了确保设计尺寸的合理性,我们可以得到反射镜口径D与顶点曲率半径比值与其视场角ω(单位:rad)的关系表达式为

为了方便讨论,任取二次曲面常数,比如-3,则二次反射镜口径与视场角的关系如图5所示。

图5 ω与D/R变化规律图Fig.5 Relationship betweenωand D/R
3 设计结果
依据设计方法最终选择前组第一片反射镜为双曲面,第二片反射镜为椭球面,根据初始光学系统指标合理约束相关参数,利用光学设计软件设计优化得到性能良好的系统前组后,根据光瞳匹配原理合理设计系统后组,最终得到了满足系统指标要求,整体性能良好且满足成像要求的光学系统,其光学系统原理图如图6所示。

图6 光学系统原理图Fig.6 Lay out of optic system
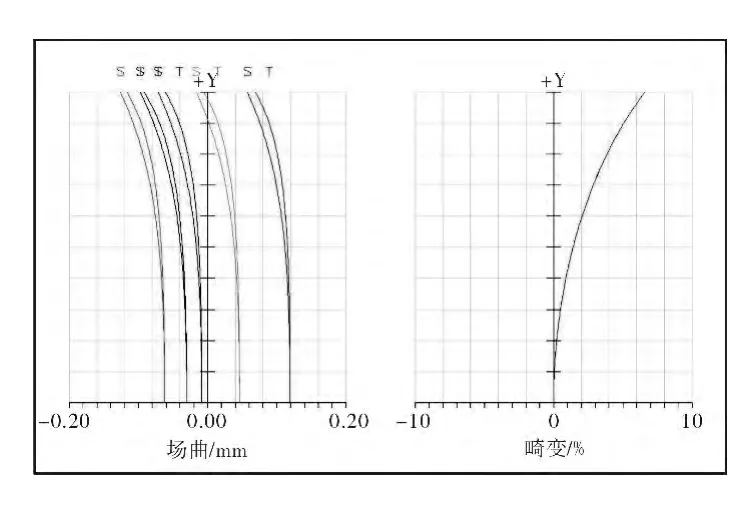
图8 场曲、f-θ畸变曲线图Fig.8 Field curvature and f-θ distortion
4 小结
本文重点阐述了折反射式全景成像系统中反射式前组的设计原理,并根据该原理设计优化得到性能优异的成像系统,完成了微光全景光学系统设计。设计的系统工作波段为0.4μm~0.9μm,有效工作F数1.5,实现水平视场360°,垂直视场30°~100°,焦距2.43mm。设计结果表明,在空间频率24lp/mm处的MTF值大于0.3。全视场f-θ畸变小于6%,设计结果性能优良,满足设计指标要求,对同类折反射式全景成像系统设计具有一定借鉴意义。
该系统由前组(反射前置镜)及后组(中继系统)构成,中继系统由4片玻璃透镜构成,其中两面为非球面,满足工作波段0.4μm~0.9μm,有效工作F数1.5的指标要求。使用中该系统实际光轴竖直放置,水平视场为环形的360°视场,垂直视场30°~100°,其有效焦距2.43mm,系统全视场f-θ畸变小于6%,调制传递函数在24lp/mm处大于0.3,且系统色差也得到很好的校正,如图7~图9所示。
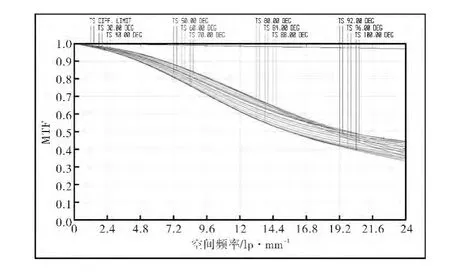
图7 MTF曲线图Fig.7 MTF curve

图9 相对照度曲线图Fig.9 Relative illumination
[1] Liu Jun,Li Jing,Gao Ming.Design of five-channel infrared panoramic optical system[J].Infrared and Laser Engineering,2011,40(4):668-673.刘钧,李璟,高明.五通道红外全景光学系统设计[J].红外与激光工程,2011,40(4):668-673.
[2] Fan Zhigang,Wang Fangbo,Chen Shouqian,et al.Catadioptric omnidirectional system with undistorted imaging[J].Journal of Applied Optics,2011,32 (5):817-821.范志刚,王方博,陈守谦,等.消畸变成像折反射全景成像系统设计[J].应用光学,2011,32(5):817-821.
[3] Spencer H M,Rodgers J M,Hoffman J M.Optical design of a panoramic wide spectral band infrared fisheye lens[J].SPIE,2006,6342:63421P.
[4] Chahl J S,Sriniva San M V.Reflection surfaces for panoramic imaging[J].Applied Optics ,1997,36(31):8276-8285.
[5] Powell I.Panoramic fish-eye imaging system:US,5631778[P].1997-5-20.
[6] Rosendahl.Lens system for panoramic imagery:US,4395093[P].1983-7-26.
[7] Korsch D.Reflective optics[M].New York:Academic Press,1991:63-80.
[8] Bartsch H J.Handbook of mathematical formulas[M].Beijing:Academic Press,1987:220-238.J.巴茨.数学公式手册[M].北京:科学出版社,1987:220-238.
猜你喜欢
新能源科技(2022年9期)2022-11-20
中国测试(2022年5期)2022-06-10
社会科学动态(2022年2期)2022-02-12
航天制造技术(2020年5期)2020-11-10
天文学报(2020年5期)2020-09-28
科技视界(2020年19期)2020-07-30
环境技术(2020年1期)2020-03-06
小资CHIC!ELEGANCE(2019年29期)2019-09-12
小资CHIC!ELEGANCE(2019年14期)2019-05-20
天津诗人(2017年2期)2017-11-29
