线性回归模型在控制系统分析中的应用
2015-05-30 09:57:55申贝贝
数学学习与研究 2015年13期
关键词:线性回归
申贝贝

【摘要】应用线性回归建立输出量与输入量之间的函数模型,并采用反向分析法,在确定输出量的情况下,分析输入量允许的偏差范围及具体操作过程.使用拉普拉斯变换及反变换对控制系统中各环节的微分方程进行推算,从而得出预设变量之间的函数模型,进而为问题的解决找到突破口.
【关键词】线性回归;反向分析;拉普拉斯变换
在探索两个量之间存在何种关系时,经常采用的方法是,由这两个量为有序实数对,建立它们的散点分布图,通过散点的分布估计这两个量之间的关系.如果散点分布整体上呈现一次线性方程的趋势,即所统计的散点沿一条直线分布时,就可以使用线性回归方程,建立两变量之间的一次函数模型.在此,观测记录输出水温T和输入量阀门旋转角α,应用线性回归建立输出量与输入量之间的函数模型,并采用反向分析法,在确定输出量的情况下,分析输入量允许的偏差范围及具体操作过程.
假设100℃的热水和5℃的冷热水按体积1∶1的比例混合输出时,水温应在52.5℃,但因多种因素的影响,输出水温在55℃,此时需要调节冷水阀,增加冷水的输入.若对照输出水温显示器,发现在增加热水时,水温又降低,低于52.5℃,则应停止增加冷水,开始调节热水阀,增加热水的输入.若增加的热水量相当之前输入冷水的量,很可能温度又回复到55℃,因此为了减少反复调节,在第一次输入冷水时,就有所控制地增加冷水量,同样,在第二次输入热水时,应对照增加的冷水控制参数来控制热水的输入量.其中对于冷热水的调节环节,采用旋转阀门来进行.顺时针旋转增加热水的输入量,逆时针旋转增加冷水的输入量.因此,阀门旋转的角度大小,直接表示输出水温的大小.接下来探索旋转角α和输出水温T之间的关系,建立函数模型T=T(α).
旋转角α和输出水温T之间的函数关系是T=a+bα(a,b为待定常数).观察(α,T)样本,记录样本点:(α1,T1),(α2,T2),(α3,T3),…,(αn,Tn),在直角坐标系αOT下描出每个样本点的散点图,如图1所示.
由上述线性回归方程和误差e的概率分布所得到的分析结果显示,当旋转角α在区间α--3σ,α-+3σ范围内取值时,获得温度为T的水.根据这一分析结果,设计一条反向分析思路:先确定输出水温目标值T,再进一步探索影响旋转角α输出区域的各种因素.将每一种因素作为自变量,建立以旋转角α为因变量的数学模型.在此以下面的自动控制系统为例来说明这一设计思路.
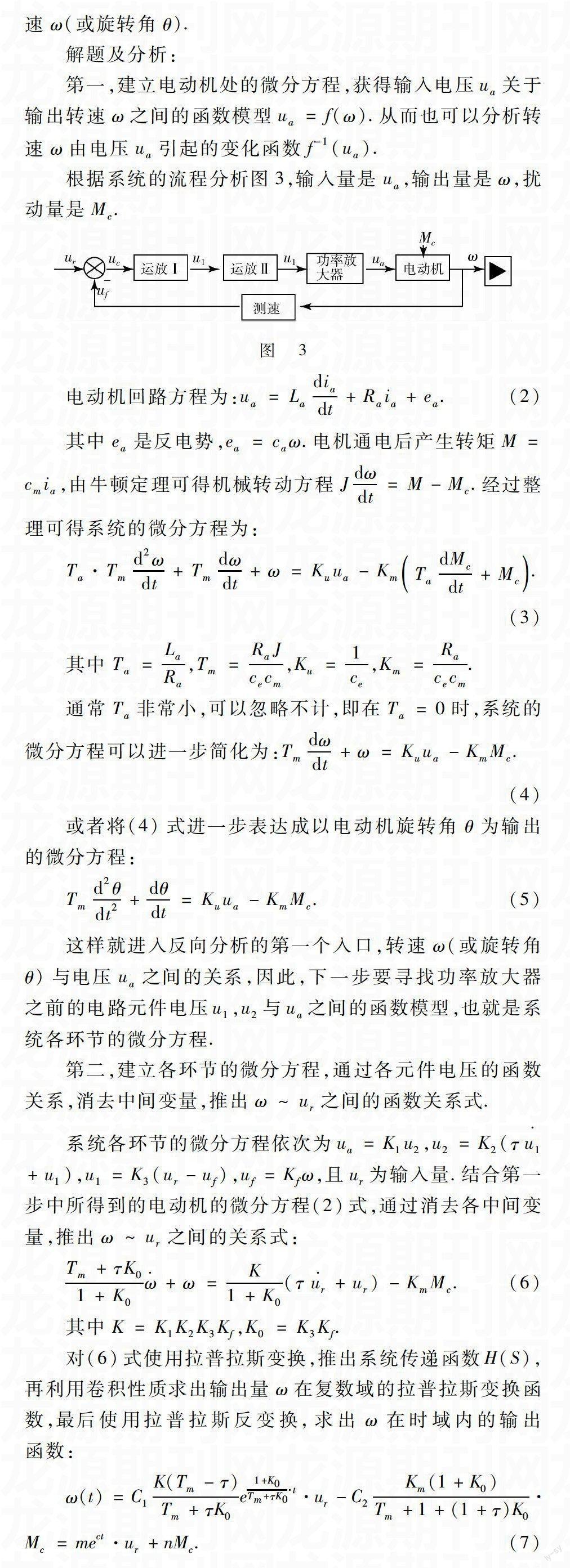
图 2例:编辑如图2所示的转速ω(或旋转角θ)控制系统微分方程及各环节微分方程,分析在输出水温T一定的情况下,导致旋转角α存在取值区间[α--3σ,α-+3σ]的因素.输入量ur经过两个运算放大器和一个功率放大器,输入电动机电压ua和等效的电机转轴上的负载转矩Mc,输出量是转速ω(或旋转角θ).
解题及分析:
第一,建立电动机处的微分方程,获得输入电压ua关于输出转速ω之间的函数模型ua=f(ω).从而也可以分析转速ω由电压ua引起的变化函数f-1(ua).
根据系统的流程分析图3,输入量是ua,输出量是ω,扰动量是Mc.
电动机回路方程为:ua=Ladiadt+Raia+ea.(2)
其中ea是反电势,ea=caω.电机通电后产生转矩M=cmia,由牛顿定理可得机械转动方程Jdωdt=M-Mc.经过整理可得系统的微分方程为:
Ta·Tmd2ωdt+Tmdωdt+ω=Kuua-KmTadMcdt+Mc.(3)
其中Ta=LaRa,Tm=RaJcecm,Ku=1ce,Km=Racecm.
通常Ta非常小,可以忽略不计,即在Ta=0时,系统的微分方程可以进一步简化为:Tmdωdt+ω=Kuua-KmMc.(4)
或者将(4)式进一步表达成以电动机旋转角θ为输出的微分方程:
Tmd2θdt2+dθdt=Kuua-KmMc.(5)
这样就进入反向分析的第一个入口,转速ω(或旋转角θ)与电压ua之间的关系,因此,下一步要寻找功率放大器之前的电路元件电压u1,u2与ua之间的函数模型,也就是系统各环节的微分方程.
第二,建立各环节的微分方程,通过各元件电压的函数关系,消去中间变量,推出ω~ur之间的函数关系式.
系统各环节的微分方程依次为ua=K1u2,u2=K2(τu1·+u1),u1=K3(ur-uf),uf=Kfω,且ur为输入量.结合第一步中所得到的电动机的微分方程(2)式,通過消去各中间变量,推出ω~ur之间的关系式:
Tm+τK01+K0ω·+ω=K1+K0(τur·+ur)-KmMc.(6)
其中K=K1K2K3Kf,K0=K3Kf.
对(6)式使用拉普拉斯变换,推出系统传递函数H(S),再利用卷积性质求出输出量ω在复数域的拉普拉斯变换函数,最后使用拉普拉斯反变换,求出ω在时域内的输出函数:
ω(t)=C1K(Tm-τ)Tm+τK0e1+K0Tm+τK0·t·ur-C2Km(1+K0)Tm+1+(1+τ)K0·Mc
=mect·ur+nMc.(7)
其中m=C1K(Tm-τ)Tm+τK0,n=C2Km(1+K0)Tm+1+(1+τ)K0,c=1+K0Tm+τK0.
这样就找到反向分析的第二个入口,转速ω(通过输入量ur)与时间t建立起来的联系.同时,明确输出量ω受电源电压输入量ur和扰动量Mc等因素的影响.
第三,通过反馈电压uf与输入电压ur形成的偏差ue=ur-uf,建立ω~ue关系式,
找出使得旋转角α存在取值区间的原因.
反馈电压uf与输入电压ur形成的偏差ue称为系统偏差,通过消去各环节中间变量的方式,同样可以建立ω~ue的函数关系式:
Tmω·+ω=KK23τue·+Kue-KmMc.(8)
在假设不存在扰动量Mc的作用下,对上式使用拉普拉斯变换,求出输出量ω在复数域的拉普拉斯变换函数,最后使用拉普拉斯反变换,求出ω在时域内的输出函数ω1(t)=K(τ+K3)K3Tme-tTm·ue.在只受扰动量Mc的作用下,令ue=0,对上式再次使用拉普拉斯变换,求出输出量ω在复数域的拉普拉斯变换函数,同样使用拉普拉斯反变换,求出ω在时域内的又一个输出函数ω2(t)=KmMc(e-tTm-1),最后根据叠加原理确定ω(t)=c1ω1(t)+c2ω2(t),(其中c1,c2为任意常数).
结合以上结论,又由dθdt=ω,所以旋转角θ是转速函数ω(t)在时域上的积分,即θ=∫ω(t)dt,当t=T时,θ(T)是一个受积分限决定的值,而α=θ(T).由于输出量ω受电源电压输入量ur和扰动量Mc的影响,反馈电压uf与输入电压ur形成的偏差ue=ur-uf,若假设ue=0,系统处于平衡状态,那么ω以一个恒常数输出;若系统偏差ue不总等于0,且是关于t的函数,则在ω(t)所在的时域内总存在输出旋转角θ的偏差,从而导致旋转角α=θ(T)在[α--3σ,α-+3σ]这个区间范围内取值,且当t=T时,α=θ(T)=∫ω(t)dt=∫[c1ω1(t)+c2ω2(t)]dt,由之前的分析这个积分结果是关于电源电压输入量ur和扰动量Mc的表达式.
因此,若期望在ue不总等于0,旋转角α=θ(T)在[α--3σ,α-+3σ]这个区间范围内取值时,通过系统调节尽快在稳定状态下得到输出量T,就需要对系统偏差ue进行消除,即调节电源电压输入量ur的稳定性和消除扰动量Mc.这样就通过预设变量之间的函数模型,找出解决问题的途径.
【参考文献】
[1]石瑞平.基于一元回归分析模型的研究[D].河北科技大学,2009.
[2]向峥嵘.区间系统状态反馈控制的完整性设计[J].系统工程与电子技术,2002(10).
猜你喜欢
中国科技纵横(2016年15期)2016-12-27 19:14:06
会计之友(2016年22期)2016-12-17 15:39:26
科教导刊·电子版(2016年14期)2016-06-25 18:47:15
中国市场(2016年18期)2016-06-07 05:12:49
电脑知识与技术(2016年6期)2016-06-06 13:41:36
商(2016年13期)2016-05-20 09:12:44
科技视界(2016年9期)2016-04-26 12:16:25
中国科技博览(2016年2期)2016-04-25 13:40:44
商场现代化(2016年6期)2016-04-21 16:29:49
科技视界(2016年1期)2016-03-30 09:21:51