基于模糊PID控制的水轮机调节的研究
2015-05-30 10:48:04王塞北王亚楠
科技创新与应用 2015年29期
关键词:PID控制
王塞北 王亚楠


摘 要:目前水电机组中多是采用常规的PID控制,由于水轮机调节系统是一个水、机、电综合控制系统,具有非线性、时变、非最小相位等特点。传统的PID控制已经不能满足在不同工况下的水电机组的需求。文章基于模糊控制理论设计一种自适应的PID控制器,通过模糊推理简单有效地实现参数的实时优化,已达到满足不同工况下的水电机组控制的需求。最后,通过仿真实验,对比常规PID控制器与模糊PID控制器的控制效果。模糊PID控制器能更加有效地改善系统的性能。
关键词:水电机组;模糊推理;PID控制;水轮机调节
水电机组是一个水、机、电综合控制系统,具有非线性、时变、非最小相位等特点。目前,在水电机组中采用的多是传统的PID控制。传统PID控制算法以其计算量小、实时性好、易于实现等特点广泛应用于过程控制。当建立起控制对象的精确数学模型时,通过参数整定方法[1]可以正确设定参数KP、KI和KD,PID控制器便可实现其作用,但是对于水电机组的情况(非线性、时变性等不确定性因素),传统的PID控制器在不同的工况下,控制效果不理想。因此,文章提出设计一种模糊PID控制器来解决不同工况下系统的控制需求问题,如图1所示。
1 水轮机调节系统原理及其数学模型
水轮发电机组先将水能转变为电能,而后把转换来的电能送入电网供居民使用。对于输入电网的电能不仅需要保证其供电安全性,而且要求电能的频率和电压保持在特定值的正常波动范围内。然而决定水电机组所输出的电能质量的因素是对水电机组调节的控制。例如,在出现频率和电压波动过大的现象时,会造成用电设备的安全问题。水轮发电机组通过水轮机调速器维持来其运行的稳定性,从而保证输送至电力系统中电能的质量。它能够根据负荷的变化对应地调节水电机组的功率输出,将机组频率保持在合理的范围内。
在水轮机调节系统中,水轮机调速器作为控制器,水轮发电机组作为控制对象,从而组成一个闭环控制系统。水轮机调节系统通常包括这几方面内容:压力引水系统、水轮机、发电机、调速器等,它是一个水、机、电三方面多因素耦合的非线性系统,其结构图如图2所示。
2 模糊控制原理
模糊控制[4]是以模糊集理论、模糊语言变量和模糊逻辑推理为基础的一种智能控制方法,它是模仿人的大脑模糊推理和决策过程的一种智能控制方法。
模糊控制器的基本结构有模糊化、模糊推理、反模糊化。它们各自作用分别如下:
模糊化:将输入的精确量转化为模糊量。模糊推理:依据模糊控制规则库和系统当前状态,运用模糊推理方法得到模糊输出值。反模糊化:将模糊数值转化为精确控制量。
3 水电机组的模糊PID控制器设计
3.1 模糊控制器类型的确定
模糊控制器被分为两类:一是单变量模糊控制器;一是多变量模糊控制器[5]。
就一般情况而言,控制器的维数决定着控制的精度。显而易见,维数的增加不仅造成模糊规则的数目的增多,而且对控制算法也提出更高的要求。通常选择受控变量给定的偏差E和偏差变化EC作为二维模糊控制器的两个输入变量,它们能比较准确地反映过程控制中的输出变量的动态特性。相比一维控制器,二维控制器的控制效果要好,而且在计算机上实现起来也比较容易,因此成为运用广泛的一类模糊控制器。在文章中选用以频率的误差E和频率误差变化率EC为输入的二维模糊控制器是合适的。
3.2 变量的模糊化
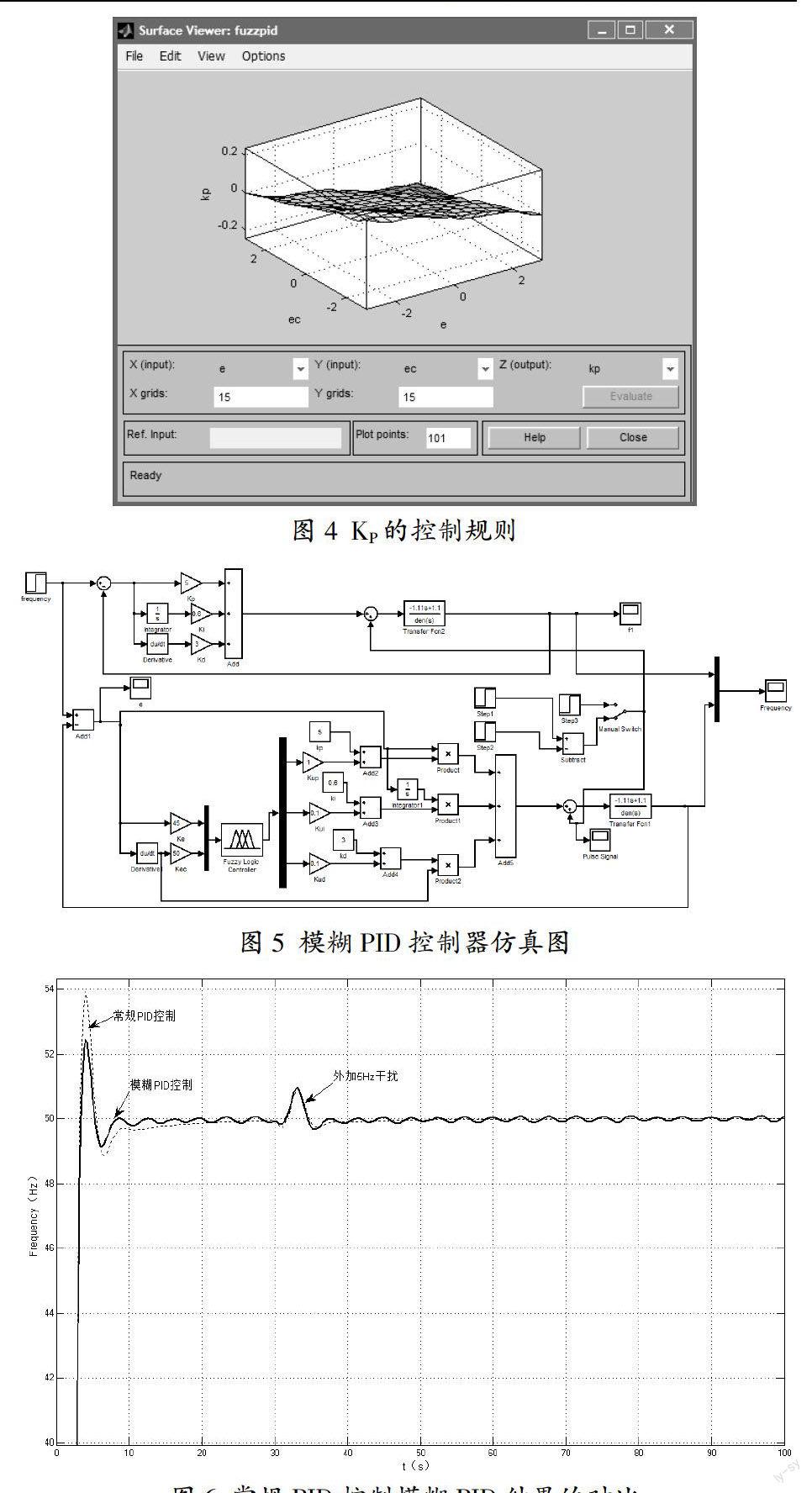
在水轮机调节系统单机带孤立负荷运行工况下,根据经验和专家的知识,设定输入变量的基本论域分别为e:(-0.0777;0.0777),ec:(-0.0583;0.0583);输出变量基本论域Kp、Ki、Kd都为(-0.2,+0.2)。分别将其分为七个等级:负大(NB),负中(NM),负小(NS),零(ZO),正小(PS),正中(PM),正大(PB)。模糊集合的论域分别取为E:(-3,+3),EC:(-3,+3),Kp:(-0.3,+0.3),KI:(-0.06,+0.06),KD:(-3,+3)。之后,根据量化因子、比例因子计算公式,可以计算出相应的量化因子[6,7]。
3.3 规则库的建立
从系统的稳定性、响应速度、超调量等各方面来综合考虑,针对不同的e和ec相应地调整KP、KI、KD,通常采用的原则是:当e较大时,为使系统具有较好的跟踪性能,应取较大的KP与较小的KD,同时为避免系统出现较大的超调,应对积分作用加以限制,常取KI适中甚至0;当e和ec中等大小时,为使系统具有较小的超调,KP应该取小些,KD的取值对系统影响较大,应取得小一些,KI取适中;当e较小时,为使系统具有较好的稳定性能,KP与KI应取得大些,同时为避免系统在设定值出现振荡,并考虑系统抗干扰性能,当ec较大时KD可取得小些;当ec较小时,KD可取大一些。部分规则控制表如表1所示。
4 Simulink仿真与结果
运用MATLAB软件的Simulink进行系统的仿真模拟,如图5所示。通过常规PID和模糊PID对比,并在其中外加5Hz的干扰,经过调试可以得到图6结果。
对比常规的最优PID的结果,模糊PID得到的结果,超调量较小,响应速度较快,稳态误差较小,能够满足实际生产的需求。
5 结束语
常规的PID针对线性系统,在选择最优参数后,能够获得比较理想的结果。但是考虑到水电机组的非线性、时变等特点,常规的PID控制有其局限和不足。相比而言,模糊PID能适合于这种非线性情况,同时也能获得较好的结果,具有一定的价值。但是,模糊PID控制器设计的好坏,在较大的程度上受所制定的模糊规则和论域、隶属函数重叠度的选择等因素影响。因此,需要考虑好这些方面。
参考文献
[1]宁海峰.参数模糊自整定PID控制器的研制[D].华侨大学,2006.
[2]廖忠,林志贵,沈祖诒.基于模糊的自校正PID控制在水电机组上的应用[J].动力工程,2004,24(2):208-211.
[3]周铁龙.水轮机调节系统建模及神经元控制研究[D].重庆大学,2006.
[4]刘金琨.智能控制[M].电子工业出版社,2012.
[5]王立新.模糊系统与模糊控制教程[M].清华大学出版,2003.
[6]李兵.模糊PID液位控制系统的设计与实现[J].合肥工业大学,2006.
[7]王述彦.基于模糊PID控制器的控制方法研究[J].机械科学与技术,2011,30(1):168-172.
作者简介:王塞北(1986,10-),女,籍贯:河北省遷西县,2010年毕业于长江大学电气工程自动化专业,现就职于海委引滦局大黑汀水库管理处、助理工程师,本科,研究方向:机电一体化。
猜你喜欢
山东工业技术(2016年23期)2016-12-23 17:27:08
教育界·下旬(2016年8期)2016-12-14 10:35:15
科学与财富(2016年26期)2016-12-01 21:15:53
企业技术开发·中旬刊(2016年10期)2016-11-12 14:53:44
电脑知识与技术(2016年22期)2016-10-31 20:52:02
科技视界(2016年6期)2016-07-12 09:16:47
科技视界(2016年12期)2016-05-25 12:01:14
物联网技术(2015年12期)2015-12-28 14:19:59
现代电子技术(2015年22期)2015-12-02 21:31:33
现代电子技术(2015年15期)2015-08-14 21:19:49