
可变焦距机器视觉镜头光学系统设计
2015-05-29 09:19刘巧玲陈丽娜余华恩柯华恒梁秀玲
应用光学 2015年2期
刘巧玲,陈丽娜,余华恩,柯华恒,梁秀玲
(福建师范大学 光电与信息工程学院 福建省光子技术重点实验室,福建 福州350007)
引言
典型的机器视觉系统一般包括光源、光学镜头、智能相机、图像处理单元(或图像采集卡)、图像分析处理软件、监视器、通讯/输入输出单元等。其中光学镜头负责采集图像信息将目标成像在后续智能相机上。一个好的机器视觉系统必须能够利用所抽取目标的特征进行准确的测量和判断,可见光学镜头成像质量直接影响到机器视觉系统的整体性能。根据焦距能否调节,机器视觉镜头可分为定焦距镜头和变焦距镜头两种。定焦距镜头由于其成像质量高被广泛应用,但是定焦距镜头只能在其焦距处达到最佳的监看效果,当想监看的距离较远且范围较大时就只能增加摄像机的数量,或着采用变焦距镜头[1]。随着光学玻璃的发展和光学设计水平的提高,变焦镜头的成像质量与定焦镜头的差距越来越小,相对于增加摄像机数量而言,利用高像质的变焦距镜头无疑是个更好的选择。
中国已经成为全球制造业的加工中心,是世界机器视觉发展最活跃的地区之一,应用涵盖了国民经济各个行业。用户对提升产品质量和保持产品一致性的需求越来越高,使得机器视觉系统对产品的监控信息需从局部到整体都能做出准确处理。机器视觉是一项综合技术,其中包括数字图像处理技术、机械工程技术、控制技术、光源照明技术、光学成像技术、传感器技术等[2],目前国内外对机器视觉的研究主要集中在数字图像处理方面[3-4]。在光学镜头方面研究较少且主要是针对远心镜头和定焦距镜头[5-6],这类镜头只能对固定的检测对象进行监看,当需要对不同焦距下的对象成像时,就需要变焦镜头。作为机器视觉系统的重要组成部分,高倍率、高成像质量的机器视觉变焦距镜头肯定会成为主流趋势。本文在通过查找资料和市场调研后,利用Zemax软件设计出一款10mm~100mm可见光多焦点机械变焦光学系统,系统总长134mm,工作距离290mm~340mm,利用0.84cm(1/3英寸)CCD图像传感器进行接收,可以监测(19.2mm×25.6mm~101.4mm×135.2 mm)的目标,可应用于各种面额的人民币(包括硬币、纸币)印刷质量的监测、电子集成块字符的读取和校验、线路板线路和开孔尺寸以及位置的测量等方面,具有长工作距离,小畸变,大变倍比,结构紧凑,成像质量高等优点。
1 设计原理
变焦距物镜是一种利用系统中某些镜组的相对位置移动来连续改变焦距的物镜,有光学补偿和机械补偿两种:一种是“前后固定组+双组联动+中组固定”构成光学变焦距系统,使像面位置的变化量大为减少;另一种是“前固定组+线性运动的变倍组+非线性运动的补偿组+后固定组”构成机械补偿变焦距系统,使像面位置不动,各组的运动需由精密的凸轮机构来控制[7]。本文采取的是机械补偿法实现变焦,如图1所示。

图1 机械变焦示意图Fig.1 Schematic of mechanical zoom
图1的上部为短焦位置,下部为长焦位置。
设前固定组焦距为f′1,变倍组、补偿组、后固定组的放大率分别为m2,m3,m4,则系统的组合焦距为

式中:f′1,m4是常量;m2,m3随变倍组、补偿组的移动而改变,从而使组合焦距f′改变[8]。
2 设计过程
2.1 设计指标
机器视觉系统的特点是可提高自动化程度,在一些特殊场合代替人眼做测量和判断。系统在短焦时系统结构属于反远距类型,此时视场角较大,会产生很大的畸变[9],因为人眼感觉不到小于2%的畸变,作为代替人眼做监控的机器视觉镜头,除了满足摄影光学系统基本像质要求外,对畸变有更高的要求。本系统给定的光学技术指标如表1所示。

表1 10倍变焦系统设计指标Table 1 Design specifications of 10×zoom system
2.2 初始结构的选取

图2 10倍变焦镜头初始结构Fig.2 Initial structure of 10× zoom system
通过查阅光学设计手册[10],选用了由16片镜片组成,F数为4,变焦范围1mm~10mm的初始结构,采用机械变焦负组补偿方式,如图2所示。
2.3 优化过程的控制
1)根据设计指标利用Zemax软件进行设计,输入视场、F数、波长和初始结构参数,设计光谱为可见光,采用成都玻璃库中的玻璃,此时得到的是一个焦距为10mm的定焦镜头。
2)为使像面位置不变,必须控制镜头总长一致,在 Muiti-Configuration Editor设置10个组态,利用厚度求解TSP2操作数,使得第7面到第17面之间的厚度恒定,保证镜头在变焦过程中总长始终保持一致。并在Merit Function Editor对应组态中输入对应焦距操作数,目标值分别设为10mm,20mm,…,90mm,100mm。
3)在构建默认评价函数的基础上,将系统的玻璃和空气厚度、曲率半径设为变量,利用MNCG、MNEG、MNCA、MNE等操作数根据加工余量对玻璃中心和边缘厚度、空气厚度进行控制,使得优化出来的镜头能满足成像要求,使用的镜片能满足加工、装配的工艺要求。系统第1片和第2片、第6片和第7片,第9片和第10片镜片为双胶和透镜,可以矫正近轴球差、色差。第5片~第7片为补偿组,由 H-LAK12,H-ZK6,ZF13,H-ZK6组成,第9片、第10片为变倍组,由 HLAK12,H-ZF4组成,冕牌玻璃与火石玻璃的搭配有利于校正像差。系统存在多片弯月形透镜,要求透镜的曲率需满足机械定中心条件:

4)机器视觉镜头功能是将被观察的目标成像到图像传感器上,并通过机器视觉相机送到用于储存、处理、显示的输出设备上进行后续分析,为了保证所拍摄图像的清晰度,须对球差、像散、畸变和场曲进行校正。由初始结构可知,该系统为小球差系统,初始结构中存在3组双胶合透镜,使得整个系统色差很小,因此不需要对彗差、色差进行专门的校正。使用Optimization功能自动优化,观察优化结果,调整优化操作数,平衡各项像差,反复修改直至优化达到目标要求。
2.4 优化结果
优化后的镜头结构光学总长度为134.189mm,由于整个系统焦距变化范围较大,多重结构设置了10mm,20mm,30mm,…,100mm共10个组态,更能反映变焦过程中各个焦距段的成像情况。后工作距离9.045mm,像高等于6mm,能与1/3英寸CCD相匹配。在工作距离为320mm时,其短焦10mm,中焦50mm,长焦100mm处的结构如图3所示。

图3 变焦系统短焦、中焦、长焦最终结构Fig.3 Final structure of zoom system
从3个结构图可以看出,通过第二组元变倍组、第三组元补偿组的运动,改变各个组份之间的空气间隔,从而实现焦距的变化。在优化过程中合理控制各个透镜组元间隔和镜片曲率半径,使镜头结构紧凑[11]。
3 像质评价
实际光学系统所成的像与理想成像存在差异,光线经光学系统各表面传输会形成多种像差,使所成的像产生模糊、变形等。像质评价就是对系统成像不完善程度进行分析,从而评价光学系统成像质量的优劣。
3.1 球差
由于球差的存在,使得在高斯像面上得到的不是点像,而是一个圆形弥散斑。球差越大,高斯像面上的弥散斑也越大,这将使像变得模糊不清,为使成像清晰必须校正球差。系统在短焦10mm和长焦100mm处的球差如图4所示。
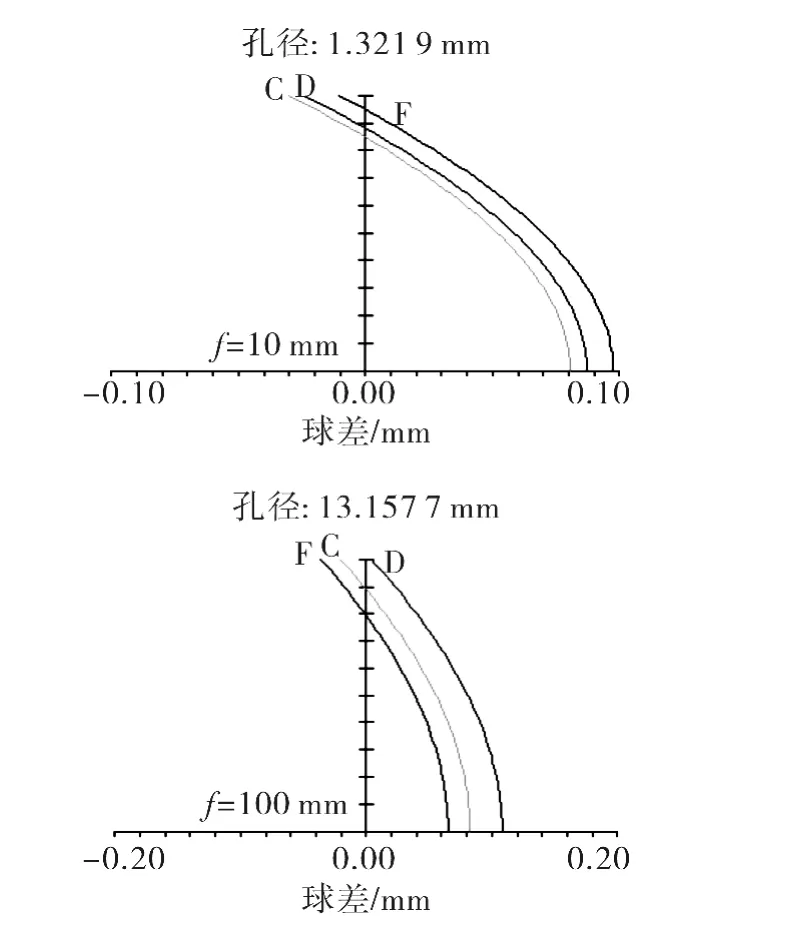
图4 变焦镜头球差图Fig.4 Spherical aberration curves
由图4中可看出,系统同时存在初级和二级球差,根据球差容限要求,边光球差的容限为1倍焦深[12]。通过焦深计算公式可得系统的焦深为0.029mm,3个结构主光线的边光球差分别为0.029mm、0.024mm、0.020mm,整个系统在焦距10mm处有最大球差值,均小于1倍焦深,满足成像要求。
3.2 场曲和畸变
当光学系统存在场曲时,不能使一个较大的平面物体上的各点同时在同一像面上成清晰像,如果畸变过大就会引起像的失真。机器视觉变焦镜头在短焦处的畸变最大。系统在短焦10mm和长焦100mm处的场曲和畸变,如图5所示。
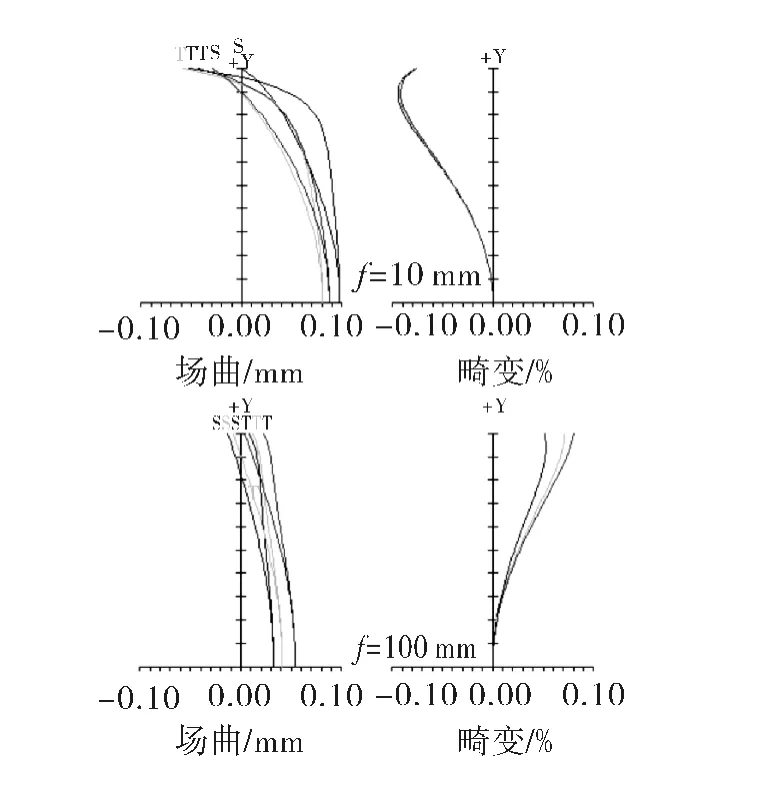
图5 变焦镜头的场曲和畸变图Fig.5 Curvature field and distortion
系统在10mm,50mm,100mm 3个焦距处的场曲值分别为0.052mm、0.026mm、0.023 mm,畸变值为0.936%、0.412%、0.714%,系统的场曲在焦距为10mm处有最大值,畸变在焦距为10mm处有最大值,各个焦距段的场曲都控制在0.06mm以内,畸变在1%以内。
3.3 色差
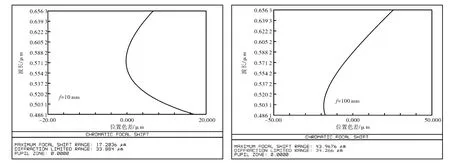
图6 变焦镜头位置色差图Fig.6 Focal shift curves
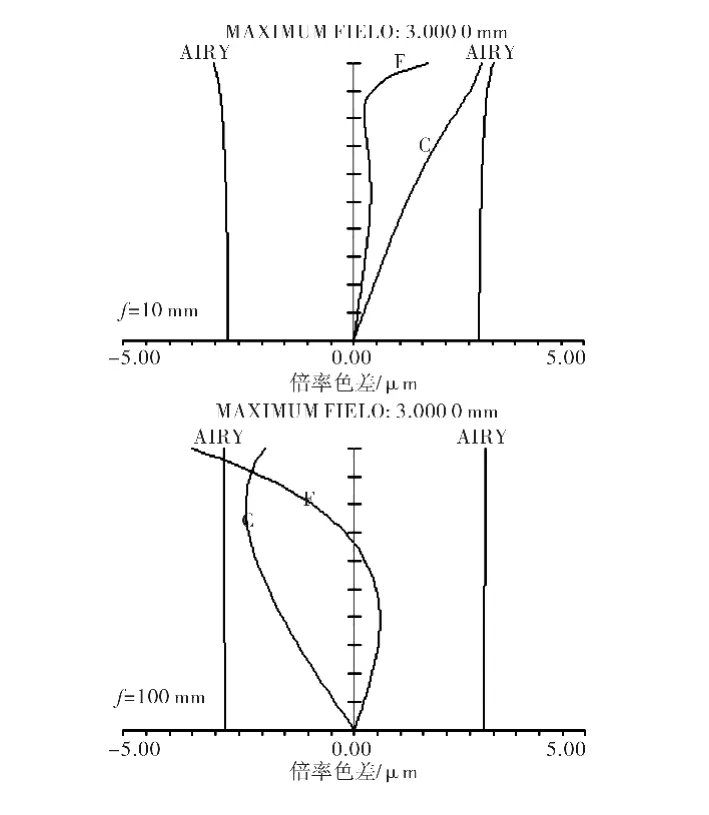
图7 变焦镜头倍率色差图Fig.7 Lateral color curves
当系统存在较大位置色差时,图像会模糊不清;存在较大倍率色差时,图像带有彩色边缘。图6给出了系统在短焦10mm和长焦100mm处的位置色差,分别为0.017mm和0.044mm。图7给出了系统在短焦10mm和长焦100mm处的倍率色差,分别为0.800mm和1.926mm,在100mm焦距处位置色差和倍率色差最大。图中显示了本系统倍率色差大部分都控制在艾里斑范围内,满足成像要求。
3.4 调制传递函数(MTF)
调制传递函数(MTF)的值反映了系统的成像质量,图8给出了在短焦10mm,中焦50mm,长焦100mm处的MTF曲线。
由图8可以看出,在3个焦距处MTF曲线光滑平直,有较好的成像质量。因为在0.7视场以内对成像质量影响大,其以外边缘视场对成像质量影响较小。所有焦距段在0.7视场内,MTF在100lp/mm处均大于0.4,全视场在100lp/mm均可达到0.3以上,表明镜头的分辨率较好。系统在其他焦距段的MTF在100lp/mm处也均大于0.3,可以与有720像素×960像素的CCD匹配。

图8 变焦镜头分别在10mm、50mm、100mm 3个焦距处的调制传递函数图Fig.8 MTF curves for 3 zoom positions
3.5 点列图
点列图的分布可以近似像点的能量分布,利用这些点的密集程度能够平衡成像质量的好坏。图9给出了在短焦10mm,中焦50mm,长焦100mm处的点列图。
变焦系统在焦距10mm、50mm、100mm的边缘视场的均方根半径分别为为6.768μm、6.389μm、6.566μm,焦距为20mm时点列图的均方根半径最大,为8.527μm,系统艾里斑直径为5.446μm,大部分均控制在艾里斑范围内,衍射能量集中度接近衍射极限。
当物距为320mm时,10个焦距段的像质如表2所示,其中球差、场曲、畸变、均方根半径数值、倍率色差均取边缘视场最大值,调制传递函数取100lp/mm处最小值。
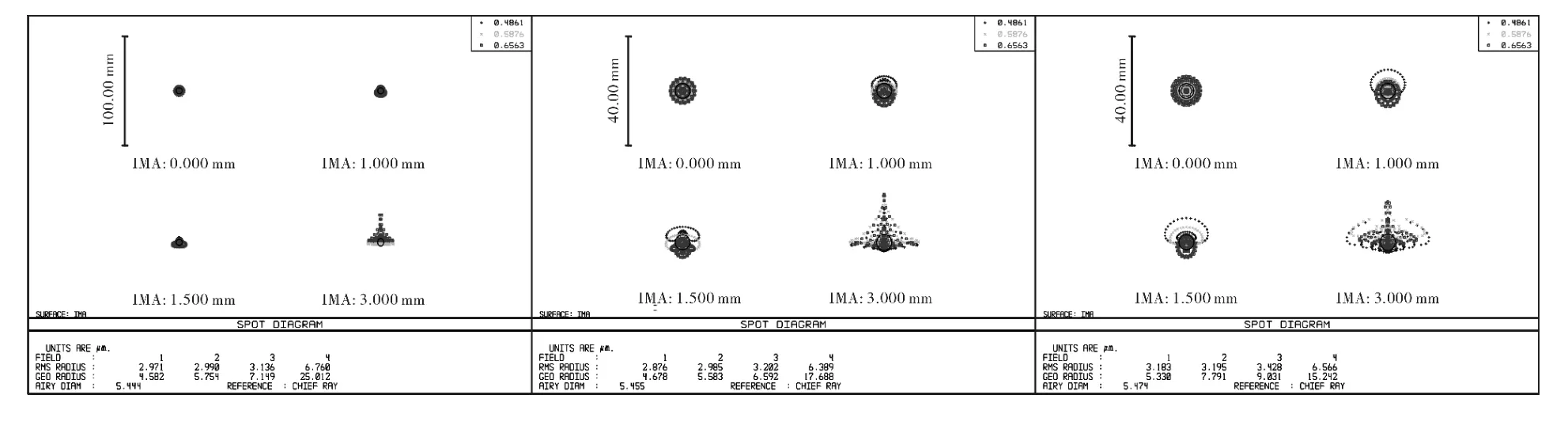
图9 变焦镜头分别在10mm、50mm、100mm 3个焦距处的点列图Fig.9 Spot diagram for 3 zoom positions
当工作距离在290mm~340mm之间变化时,通过多焦点的调节,在各个焦距段成像都很清晰,调制传递函数在100lp/mm处都保持在0.3以上,畸变都控制在1%以内。这样对被测样品放置的位置要求不是很严格。

表2 10个焦距段的像质情况Table 2 Image quality for 10 zoom positions
4 结论
采用机械补偿形式,设计出了一款可以用于机器视觉的变焦光学系统,该系统具有长工作距离,实现了10mm~100mm的10倍多焦点变焦,变焦范围大,像质优良。并对各焦距段的球差,场曲,畸变,色差等像差进行分析,各项像差均满足摄影系统像差容限。利用传递函数曲线及点列图对系统成像进行评估,设计结果满足指标要求。
[1] Wang Yunzhe,Bai Yanbing,Zhang Bo.Machine vision system design method[J].Advanced Display,2011,130:24-26.王运哲,白雁兵,张博.机器视觉系统的设计方法[J].现代显示,2011,130:24-26.
[2] Zhang Wei.Development of machine vision and its industrial applications[J].Infrared,2006,27(2):11-15.章炜.机器视觉技术发展及其工业应用[J].红外,2006,27(2):11-15.
[3] Yao Hongbing,Ping Jie,Li Liangwan.Automatic defect inspection system for spectacle lenses[J].Journal of Applied Optics,2013,34(4):633-636.姚红兵,平洁,李良湾.一种眼镜镜片缺陷自动化检测系统的研究[J].应用光学,2013,34(4):633-636.
[4] Wang Wencheng.Design of measurement system of gear parameter based on machine version[J].Journal of Mechanical Transmission,2011,35(2):41-43.王文成.基于机器视觉的齿轮参数测量系统设计[J].机械传动,2011,35(2):41-43.
[5] Lin Feng.Design of double telecentric system based on machine vision measurement[J].Optical & Optoelectrcinic Technology,2010,8(1):67-71.林峰.基于机器视觉检测的大视场双远心光学系统设计[J].光学与光电技术,2010,8(1):67-71.
[6] Li Xiaotao,Du Xiaoqing,Xiao Jianguo,et al.Design of optical imaging system for measurement of steel pipe straightness by machine vision[J].Optoelectronic Technology,2011,31(1):63-66.李小涛,杜晓晴,肖建国,等.应用于钢管直线度机器视觉测量的光学成像系统设计[J].光电子技术,2011,31(1):63-66.
[7] Liu Jun,Gao Ming.Optical design[M].Xi'an:Xi'an Electron University of Science and Technology Press,2006:174-175.刘钧,高明.光学设计[M].西安:西安电子科技大学出版社,2006:174-175.
[8] Xu Youmu.Desugn of 20×near-infrared zoom lenses[J].Infrared and Laser Engineering,1986(2):40-42.徐有木.20倍近红外变焦镜头的设计[J].红外与激光工程,1986(2):40-42.
[9] Luo Chunhua,Zhang Qiyuan,Li Yanhong.Design of 6mm~60mm megapixel zoom security lens[J].Journal of Applied Optics,2013,34(2):209-214.罗春华,张齐元,李艳红.6mm~60mm百万像素变焦安 防 镜 头 设 计 [J].应 用 光 学,2013,34(2):209-214.
[10]Yang Sutian,Lin Maozhi,Lin Jinmin,et al.Optical lens manual[M].Beijing:National Defense Industrial Press,1983:72-77.杨甦田,林茂智,林金明,等.光学镜头手册:第七册[M].北京:国防工业出版社,1983:72-77.
[11]Li Zhuo.Design of high ratio LWIR continuous zoom stystem[J].Journal of Changchun University of Science and Technology,2013(5):20-22.李卓.高变倍比长波红外连续变焦光学系统设计[J].长春理工大学学报,2013(5).20-22.
[12]Li Xiaotong,Qin Zhaofeng.Geometrical optics·aberrations·optical design[M].Zhejiang:Zhejiang U-niversity Press,2007:180-181.李晓彤,芩兆丰.几何光学·像差·光学设计[M].浙江:浙江大学出版社,2007:180-181.
[13]Hong Jian.The design of 3.2mm~8mm megapixel zoom security lens[J].Optical Instruments,2014,36(2):131-135.洪坚.3.2mm~4.8mm百万像素变焦安防镜头设计[J].光学仪器,2014,36(2):131-135.
[14]Li Yiyu,Hu Chuan,Chen Jiaojie,et al.Optical and mechanical design of 10×zoom lens for low-vision devices[J].SPIE,2012,8419:84190R1-7.
[15]Park Sungchan,Lee Sanghun.Zoom lens design for a 10×slim camera using successive procedures[J].Journal of the Optical Society of Korea,2013,17(6):518-524.
[16]Zhou Longmei,Xu Zongbo,Lu Ziwang.Design of 15×zoom lens[J].Ship Science and Technology,2012,34(Sup.):56-58.周隆梅,徐宗波,卢子旺.15倍连续变焦镜头设计[J].舰船科学技术,2012,34(增刊):56-58.
猜你喜欢
宝钢技术(2022年2期)2022-07-09
温州大学学报(自然科学版)(2019年1期)2019-03-30
时代汽车(2018年2期)2018-05-31
摄影之友(影像视觉)(2018年1期)2018-03-22
摄影之友(影像视觉)(2017年10期)2017-11-07
摄影之友(影像视觉)(2017年1期)2017-07-18
航空模型(2016年10期)2017-05-09
中国公共安全(2017年9期)2017-02-06
大众摄影(2016年12期)2016-12-07
CHIP新电脑(2016年3期)2016-03-10
