正弦机构在球面展开中的运用
2015-05-10 05:52:32龚凌云
机电工程技术 2015年5期
龚凌云
(广州铁路职业技术学院机电工程学院,广东广州 510430)
1 引言
实现钢球表面展开也就使钢球在展开机构的作用下,连续、高速的运动,并将其表面各区完全的送到传感器下进行检测,在这一过程中球表面不能有盲区。钢球表面展开运动实际上是钢球受两套独立驱动机构的作用,完成一种比较复杂空间螺旋运动。本文利用正弦机构原理提出了一种新的球面运动展开方法。
2 正弦机构原理
正弦机构如图1所示。在此机构中,从动件2与3(实为钢球,其球心固定不动)只有滚动而无滑动,故为同步运动[1]。从动件2与原动件1的转角α的正弦成正比,即
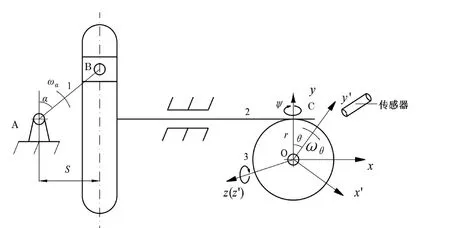
图1 正弦机构

上式中, lAB为杆AB的长度,α为杆AB的转角,ωα为杆AB的转动角速度, t为转动时间。对从动件3而言,则有:

上式中,r为球O的半径,θ为球O的转角。
由(2)式可得:

由此可知,当主动件1匀速转动时,钢球的转角θ是按正弦规律变化的,转角θ的最大值θmax取决于杆 AB的长度lAB与钢球的半径r,即
3 球面运动展开法
正弦机构实现了球绕Oz的来回偏转,如果球同时绕Oy回转,那么就能实现球体的偏转,即也就实现球面的运动展开,即为球面的运动展开法。
钢球在展开运动中,钢球的球心O在空间的位置保持不变。选取O-xyz为固定坐标系,取O-x’y’z’为动坐标系与球固结,在初始位置与固定坐标系重合。如图1所示。球绕固定坐标系Oy旋转的同时,绕Oz旋转,球绕Oy’与绕Oz’的转角分别为ψ和θ。
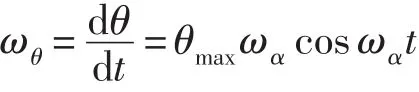
钢球在这整个运动过程中必须连续。因此,球对这两个轴的转动是有规律地定时重复,这样球面上一点运动的轨迹曲线才能是闭合的[2]。在正弦机构的作用下,θ绕Oz’(Oz)规律做往复运动,即

角速度大小
角速度矢量方向与OZ’(OZ)轴一致。转角ψ为钢球绕OY’轴在匀速运动时发生的转角,即ψ=ωψt,ωψ为钢球绕Oy/轴在匀速运动时的角速度,角速度矢量方向与Oy/轴一致。
钢球上点的位置用矢量r表示,设半径为R球面上一点P的初始坐标为(x0,y0,z0),经时间t变换后的坐标为(x,y,z)。则有

球面上P点的瞬时速度

而

由以上二式得:
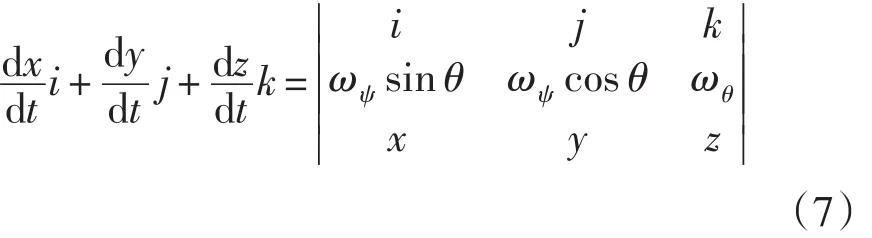
可知运动学方程为:
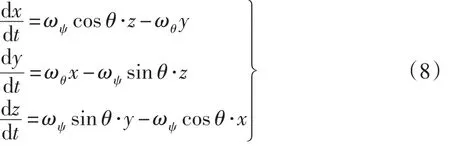
而动坐标系O-XYZ与静坐标系O-X/Y′Z′之间的转换矩阵为

球做自转运动时,其上的任一点的坐标变换矩阵为

将(10)式代入(9)式,并引入初始解条件((x , y,z|t=0=(x0,y0,z0),可得P点运动的轨迹方程即
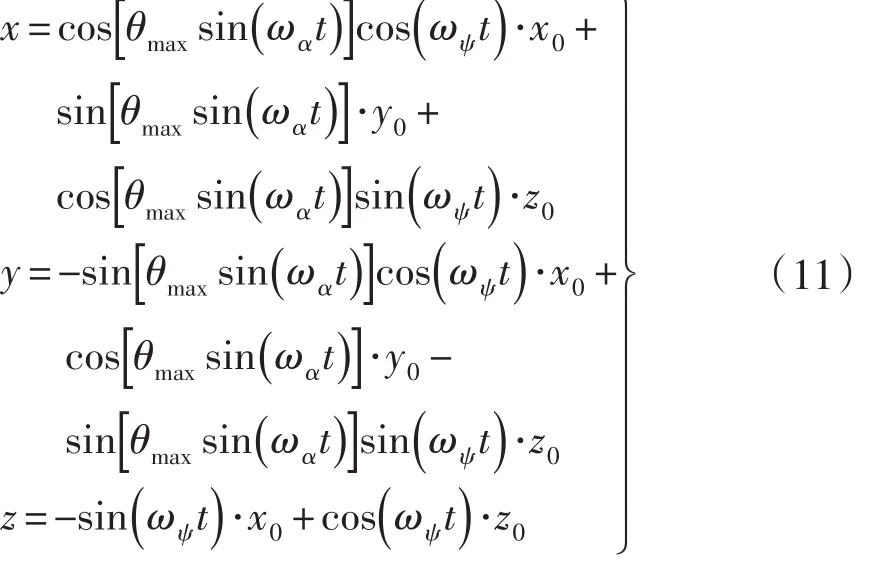
(11)式精确地给出了钢球在正弦机构(ωα)与匀速运动机构(ωψ)综合作用下,其上的一点P(x0,y0,z0经过时间t后,运动到球面上另一点(x,y,z)处的运动学方程。这一研究为钢球展开机构的优化提供了必要的数学工具与理论基础。
4 结论与实例
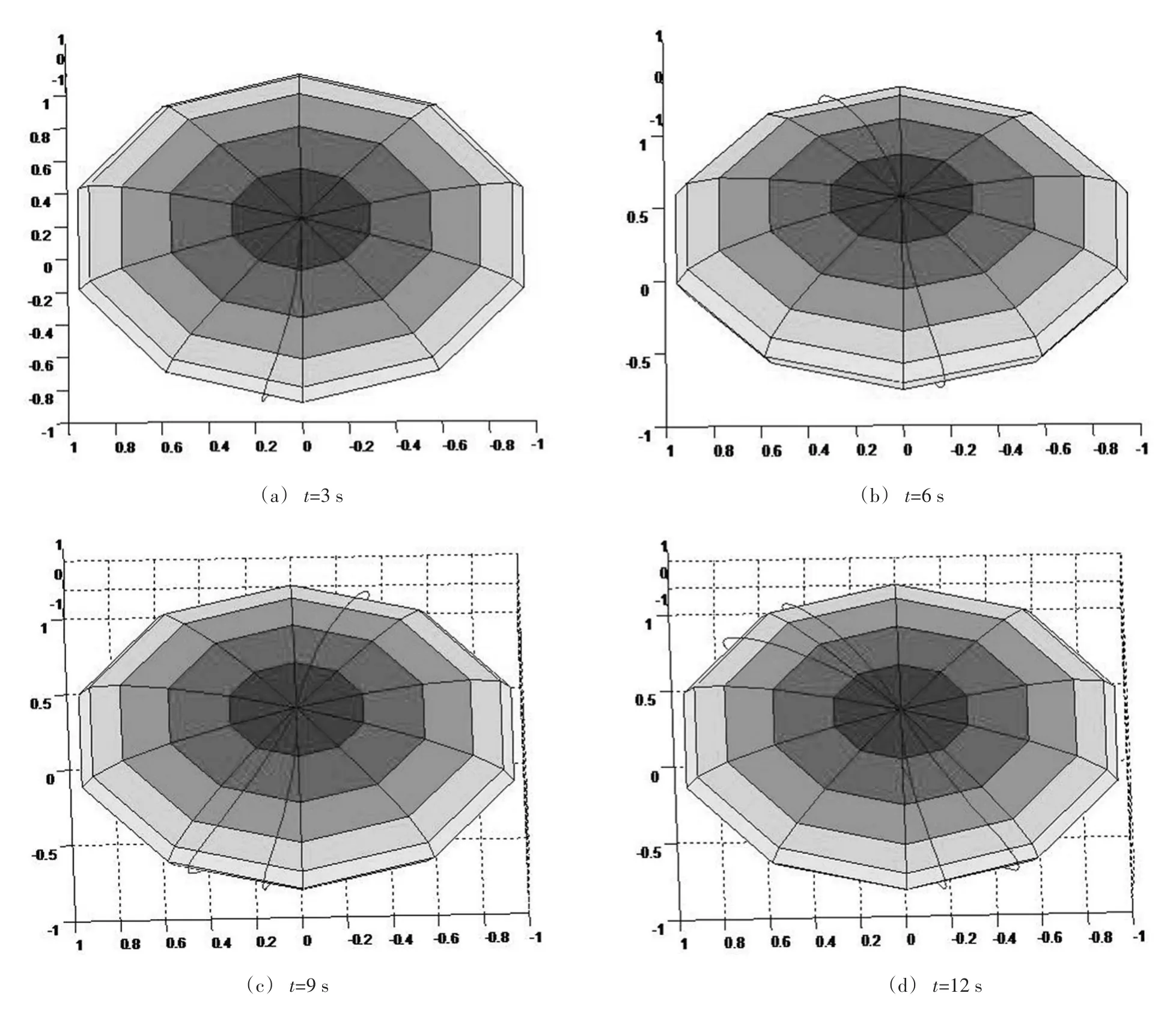
图2 不同时刻P点的运动轨迹
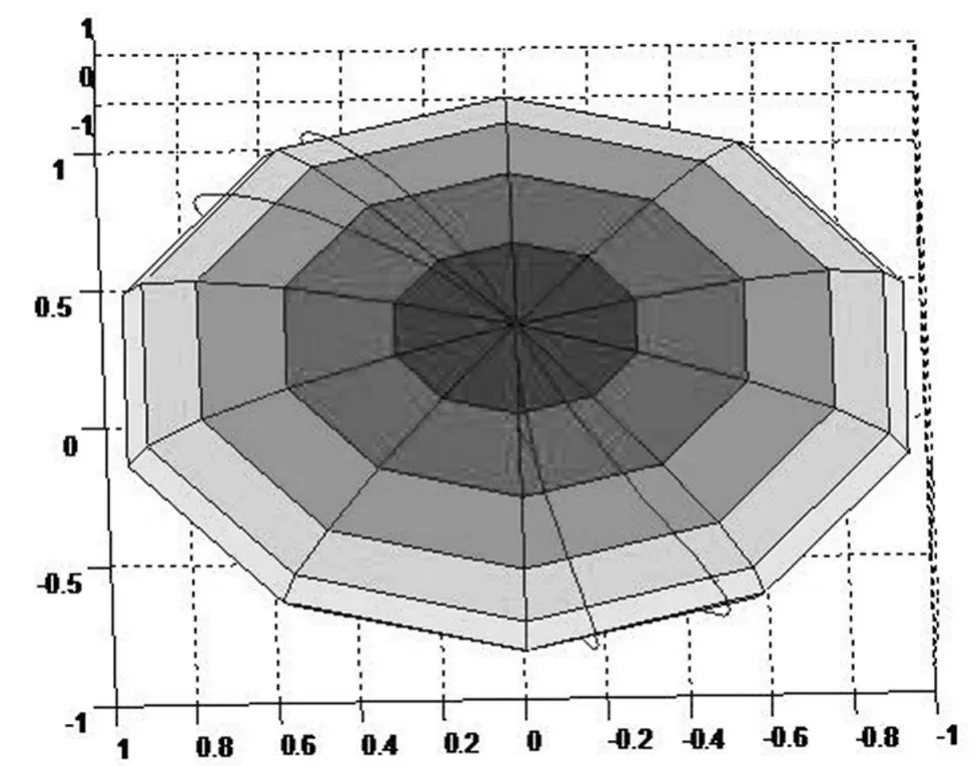
图3 P点的综合运动轨迹图
本文利用展开轮推动钢球转角呈现正弦规律变化的趋势,得出了钢球运动变化的解析式(11)。为实现钢球展开机构的优化,以此两种特定的运动定量地研究钢球的运动规律,建立一套更为准确、有效、简便的数学工具是本文研究的重点。
为了验证(11)式的正确同时利用MATLAB的数值计算功能和函数可视化功能,根据上面所提供的解析式得出球面上P点在不同时刻的运动轨迹图如图2所示。当球按照上述运动规律连续运动,直至完成一次全面展开,球面上P点的运动轨迹如图3所示,可以看出时间化分得越小,P点的运动轨迹包络成的曲线就是一个球面。
[1]苏步青,华宣积,忻元龙.实用微分几何引论[M].北京:科学出版社,1986.
[2]J.B.Marion.质点与系统的经典动力学[M].北京:高等教育出版社,1985.
猜你喜欢
昆钢科技(2021年2期)2021-07-22 07:46:54
哈尔滨轴承(2020年4期)2020-03-17 08:13:52
制造技术与机床(2019年8期)2019-09-03 01:14:40
设备管理与维修(2018年2期)2018-02-09 08:34:44
中学生数理化·高一版(2017年3期)2017-07-08 11:55:27
数学物理学报(2017年2期)2017-06-05 09:12:31
火控雷达技术(2016年1期)2016-02-06 02:18:01
中国铁道科学(2015年4期)2015-06-21 06:46:06
数学年刊A辑(中文版)(2014年5期)2014-11-01 05:43:42
河南科技(2014年6期)2014-02-27 14:06:32