基于d SPACE的电动汽车控制策略研究
2015-05-10 05:52:18冯雪丽
机电工程技术 2015年5期
冯雪丽
(杭州科技职业技术学院,浙江富阳 311402)
0 引言
随着能源的日益消耗与环境的逐渐恶化,发展新能源汽车成为现代汽车工业的方向。世界各个国家都在进行纯电动汽车的研究,作为纯电动汽车几大关键技术之一的整车控制技术是整车控制的核心。
整车控制系统包括整车控制器、电池管理系统(BMS)、电动汽车组合仪表、CAN网络通讯以及远程监控系统等。国外纯电动汽车的控制系统比较复杂,整个系统具有多个控制器,并且车辆结构形式多样,有集中电机驱动模式、多电机驱动模式和轮毂电机驱动模式,纯电动汽车可以实现前驱、后驱和四驱等多种模式[1]。国内的纯电动汽车发展迅速,集中电机驱动纯电动汽车技术已经比较成熟,国内各汽车厂商推出自主研发的此类纯电动汽车。
1 纯电动汽车整车控制策略研究
1.1 整车控制系统的功能需求及开发流程
整车控制系统根据汽车的实际运行工况,通过CAN网络或常规线束发送和接收信息,实现车内数据的实时通讯,并对整车进行相应的控制[2]。纯电动汽车的整车控制系统应具备以下功能:①汽车驱动控制;②制动能量回馈控制;③整车能量优化管理;④车辆状态显示;⑤故障诊断和处理。
整车控制系统的开发流程主要包含以下5个方面:①功能设计与Simulink仿真;②快速控制原型;③自动产品代码生成;④采用硬件在回路仿真进行ECU测试;⑤在整个开发流程中都可以进行虚拟标定。
1.2 行车转矩控制策略
如图1所示,整车有停车、待机、加速、匀速、制动、滑行和倒车7种行车工况,各种状态下的工作原理,以及状态之间转换过程分别说明如下。
(1)停车:车速为0,钥匙开关处于“OFF”位置,档位处于“P”档。控制系统低压电断开,高压继电器断开,控制系统处于非工作状态。
(2)待机:钥匙开关转到“ACC或ON”位置,整车控制系统低压上电并自检,如有如高压线路连接是否正常或绝缘是否良好、充电插头是否移除、电池SOC是否满足行车要求等错误则进行报错。当钥匙旋转到“START”位置并停留片刻后返回,如果加速踏板位置为零,且没有其他报错信息发生,那么高压继电器接通,电机使能位为1,电机进入可驱动状态。
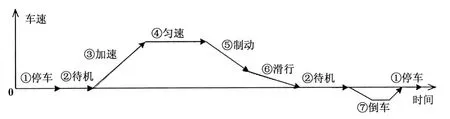
图1 行车工况图(正车速表示前进,负车速表示倒退)
(3)加速
1)加速起步过程控制
踏板位置开环起步控制。即VCU(整车控制器)将驾驶员踏板的位置解释成对应的转矩需求,发命令让电机发出响应的转矩,车速的控制由驾驶者自己掌握,类似于传统车的手动档起步,区别在于电机从0转速开始工作,没有离合器的操作,转矩的输出为踏板位置的函数,可表示为:

这种模式的优点是控制简单,驾驶员可以根据自己的意愿控制起步的车速,缺点是在坡道上起步会出现车辆的倒退。
2)起步后加速过程控制
按期望转矩控制方法:即将驾驶员的加速踏板位置解释成转矩的需求,将转矩需求发送给电机控制器发出相应的转矩驱动汽车,而车速由驱动转矩和道路阻力状态共同决定。
变速器档位换入D档,松开手制动器,踩下加速踏板到一定位置,整车控制器将接收到的加速踏板的模拟电压信号转变成数字信号,根据加速踏板位置和电机转速计算驾驶员需求转矩Tr,根据当前电池的SOC及报错信息、电机的状态等计算电机的许用转矩Tp,整车控制器取两者的最小值作为电机的实际驱动转矩(需求转矩为正值),并将此转矩命令通过CAN总线送给电机控制器,电机控制器根据此命令调节永磁电机的定子电流大小,产生相应的转矩(如图2所示)。直到驱动力与道路阻力平衡。
车辆的加减速过程的快慢由驾驶员进行控制。期望转矩和加速踏板位置的对应关系可以标定,从而调节驾驶的动力感受,通过图2中的目标转矩斜坡发生器来实现。图3给出了几种目标转矩随加速踏板位置变化的关系线,线a的转矩输出前段斜率小,转矩对踏板的响应速率慢,后段斜率大,转矩对踏板的响应速率快,由于开始加速感觉太软,一般不用这种方式。线b的转矩输出和踏板位置成正比例,控制最为简单,但前段转矩输出仍然不够迅速,动力感不够强。线c的前段转矩对踏板响应速率很快,动力感较强,且符合低速转矩需求大,告诉转矩需求相对小的规律,是较为理想的踏板转矩解释方式。线d的转矩响应速率最大,但是后段踏板为无效行程,显得并不合理。
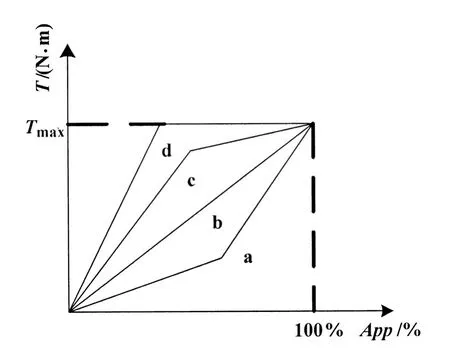
图3 相对于加速踏板位置的不同目标转矩输出特性
(4)匀速:这种情况下,加速踏板的位置基本不变,只有在道路阻力发生较小范围变化时做适当调整,以维持车速稳定,其他工作过程与加速时一样。
(5)制动:制动过程中的目标制动转矩计算原理如图4所示。在某一车速下,踩下制动踏板,电机由电动状态转换成发电模式,整车控制器根据收到的制动踏板的位置电压信号计算电制动转矩,并将此转矩命令发送给电机ECU,电机ECU控制电机发出相应的制动阻力矩,当电机转速低于某个设定转速N0(r/min)时,即车速低于对应的车速V0(km/h),电机停止输出制动转矩并转入空转状态,不输出任何转矩,此时只有机械制动器起作用。
完全再生制动系统,其原理如图5所示。这种制动系统中因为引入了电子控制液压制动力执行器,可以调节机械制动力的大小,在制动力需求较小时,全部由电机产生前轮的制动力,在制动力需求大时,驱动轮由液压和电机两种制动同时作用,前后轴制动力的分配可以按照理想制动力分配曲线I线来进行,如图6所示,这样可以发挥最大的再生制动能力,尽可能多地回收制动能量。
(6)滑行:加速踏板位置为0,制动踏板位置为0,电机输出转矩为0。
(7)倒车:档位换入“R”挡,踩下加速踏板,整车控制器根据加速踏板位置、电池状态、系统报错信息等计算驾驶员需要转矩,并将需求转矩及旋转方向命令通过CAN总线发送给电机控制器,电机控制器调节电机发出相应需求转矩驱动汽车后退。
1.3 行车模式调度策略
(1)正常驱动模式
包括开环车速控制和闭环车速控制(巡航)。开环车速控制即按照驾驶员踏板位置和路况进行车速控制;闭环车速控制即巡航控制,这种模式下,汽车按照设定的车速保持匀速行驶。
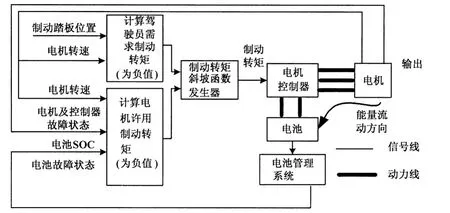
图4 制动过程中的目标制动转矩计算原理

图5 完全再生制动系统原理图
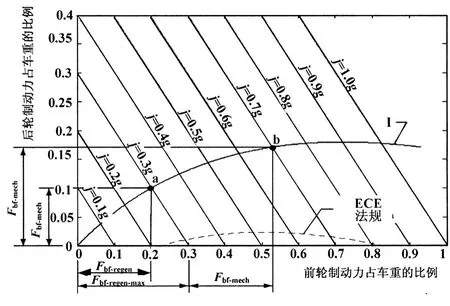
图6 完全控制再生制动系统前后轴制动力分配关系
(2)制动模式
触发条件为制动踏板位置大于初始阈值,属于绝对触发条件,即只要满足这个条件就进入制动模式工作。
(3)低电量模式
如图7所示,电池的SOC低于40%后,电池的放电效率开始较快下降,所以当SOC小于40%就进入低电量运行模式,当SOC小于20%后应当禁止行车并进行补充充电[3]。
(4)故障模式
故障标志出现是进入故障模式的条件,故障的管理可以分级进行管理,只有在非严重故障的情况下才可以进入故障运行模式,如果是严重故障,直接进入停机状态[4]。
2 基于dSAPCE纯电动汽车的整车控制策略建模
2.1 整车控制系统总体结构
整车控制系统根据汽车的实际运行工况,通过CAN网络或常规线束发送和接收信息,实现车内数据的实时通讯,并对整车进行相应的控制。整车控制系统的结构如图8所示。
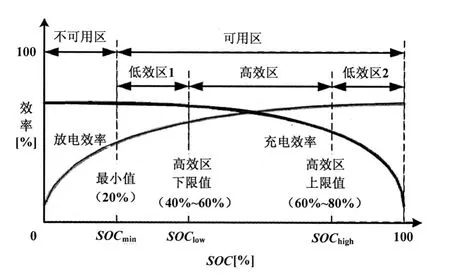
图7 电池的充放电效率区域分布
2.2 行车模式调度建模
整车工作时有正常行驶模式、巡航行驶模式、制动回馈模式、电量不足模式、停止行驶模式和故障行驶模式6种状态,各种模式之间的转换过程说明如下。
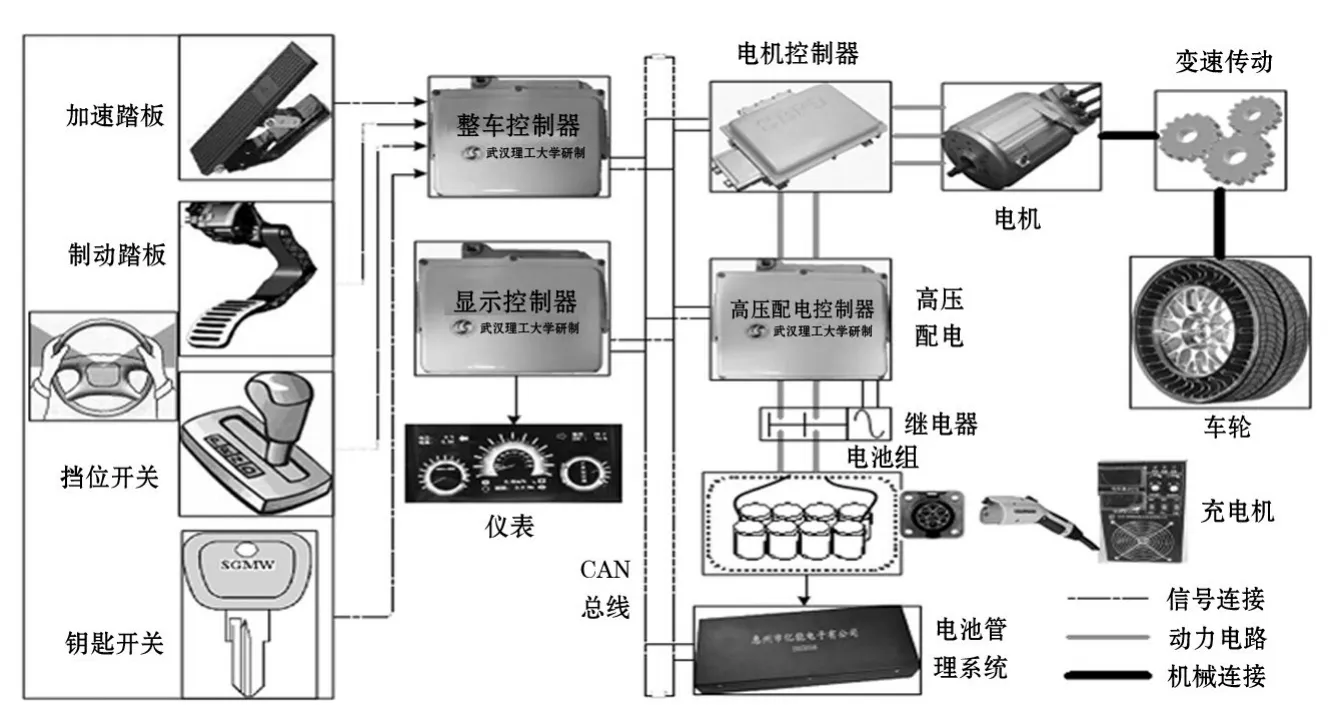
图8 整车控制系统结构图
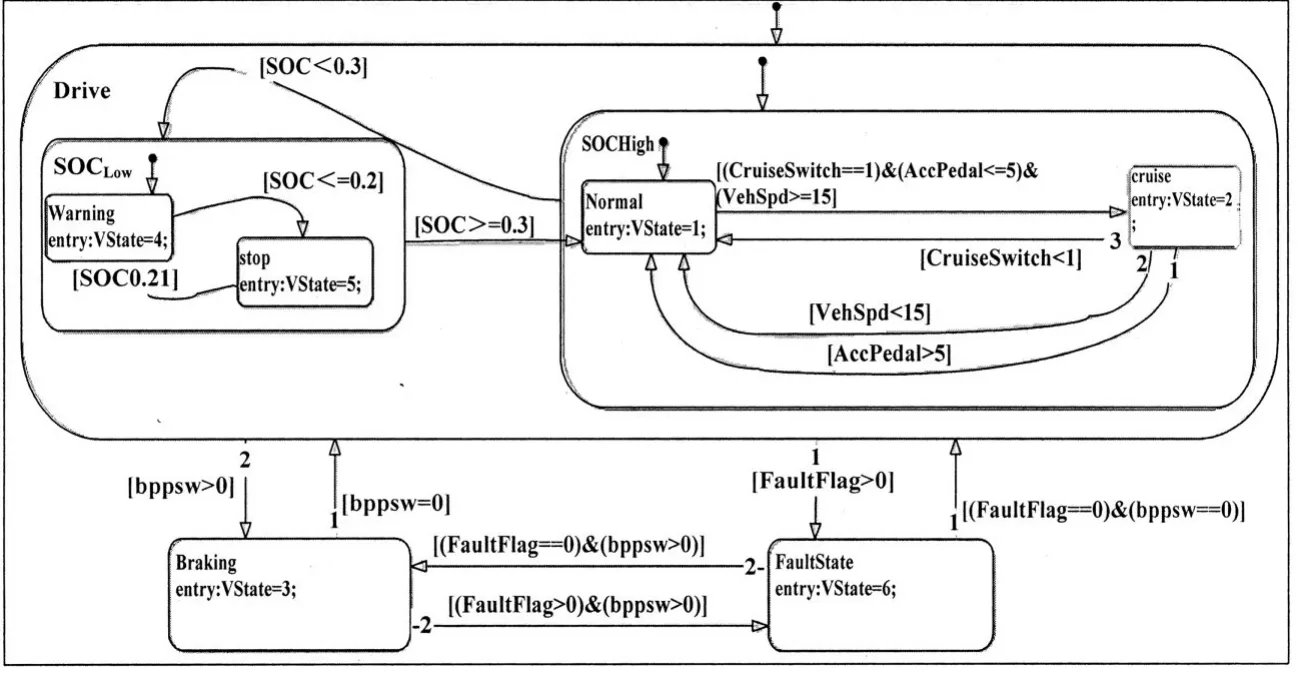
图9 行车模式判断状态流建模
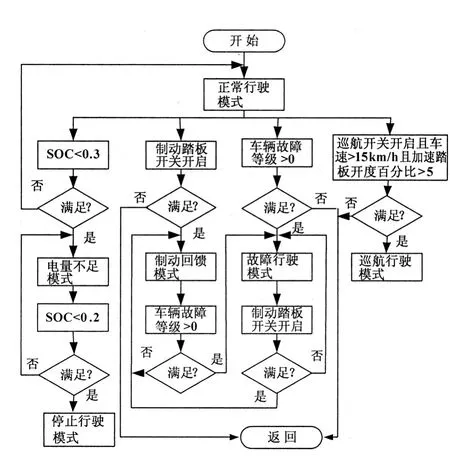
图10 行车模式判断流程图
当SOC低于30%时,车辆进入低电量事件。此时如果SOC同时高于20%,车辆进入“电量不足模式”,电机降载为需求扭矩的一半,以使车辆尽可能地延长行驶里程,赶往充电站充电;但当SOC低于20%时,为了防止损坏电池,提高电池使用寿命,车辆进入“停止行驶模式”,给定电机扭矩为0 N·m,禁止车辆行驶。
当SOC高于30%时,车辆进入高电量事件。此时如果巡航开关开启、车速高于15 km/h,且加速踏板百分比小于5,车辆进入“巡航行驶模式”;当其中任一条件不满足时,车辆就跳出巡航行驶模式返回“正常行驶模式”。
当制动踏板开关开启时,车辆进入“制动回馈模式”,此时,电动汽车将一部分制动能量回收转化为电能,而制动踏板关闭时,车辆返回到“正常行驶模式”;当车辆故障等级大于0时,车辆就进入“故障行驶模式”,然后依据故障的严重程度的等级来决定电机是否需要降载或强制停转。当车辆故障消除后,通过判断制动踏板开关的闭合状态来决定车辆是进入“制动回馈模式”还是进入“正常行驶模式”。行车模式判断状态流建模和流程图分别如图9和图10所示。
3 基于d SPACE的整车控制策略仿真测试
3.1 测试方案及其建模
由于本文所研究纯电动汽车还在研究阶段,无法直接在整车上测试本控制系统的可靠性和准确性,故本文在此只对本控制系统中的行车模式调度建模进行测试。
3.1 .1行车模式调度的测试方案
通过SIMULINK模块库中的Signal builder输入源模块,模拟决定行车模式的输入量如SOC、加速踏板位置、制动踏板位置、巡航开关和车速等,通过对输入信号的调整,观察行车模式的调度是否与所建立的模型的逻辑关系相符,其模型建立如图11所示。
3.2 测试过程及结果分析
如图12和图13所示,时间1到2秒制动踏板开关开启,车辆进入“制动回馈模式”,行车模式输出3;3到4秒时,由于SOC大于30%,巡航开关和制动踏板开关关闭,故障等级为2,故此时行车模式输出6;6~7秒,巡航开关开,车速高于15 km/h,且加速踏板百分比小于5,车辆进入“巡航模式”,行车模式输出2;8到9秒SOC低于30%,车辆进入低电量事件,此时SOC同时高于20%,车辆进入“电量不足模式”,行车模式输出4;9到10秒,SOC低于20%,为了防止损坏电池,提高电池使用寿命,车辆进入“停止行驶模式”,行车模式输出5;其他工况下,车辆进入“正常行车模式”,行车模式输出1。由此可得到行车模式的控制是正确可靠的。
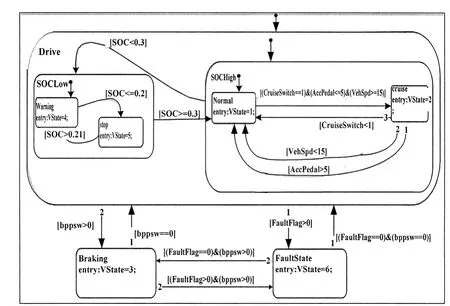
图11 行车模式调度测试建模
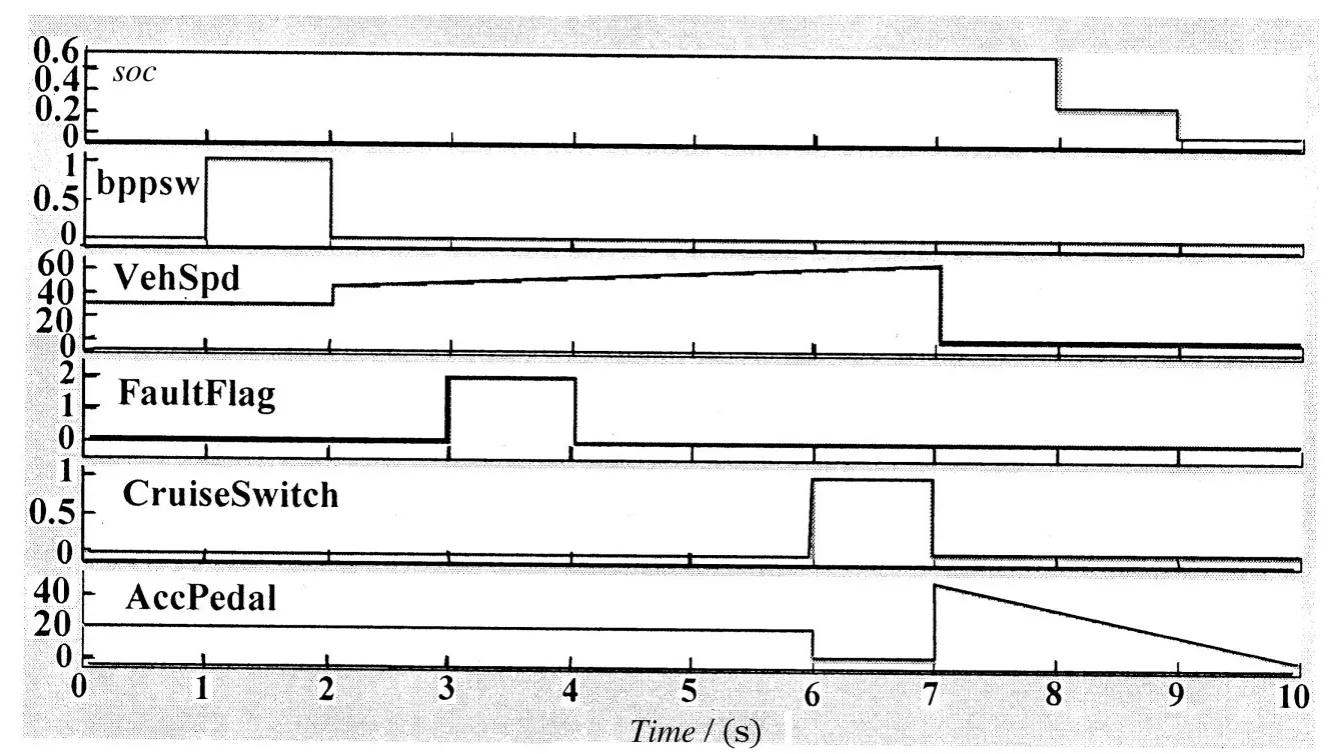
图12 行车模式控制输入信号
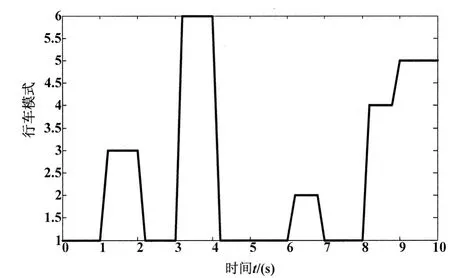
图13 行车模式调度测试结果
4 总结
本文着重于基于dSAPCE的纯电动汽车整车控制策略的研究,主要成果有:
(1)对整车控制策略进行了研究,根据整车控制系统的功能需求,分别对行车转矩控制策略、行车模式调度策略和整车故障管理策略进行研究,提出起步、加速和制动等行车模式的控制方案,行车模式调度控制方案以及电池、电机和高压安全管理系统的故障管理策略;
(2)依据所提出的控制策略,结合仿真软件dSAPCE,和MATLAB/SIMULINK软件,进行整车控制系统的行车模式调度模型的建立;
(3)基于dSPACE软件对所建立的模型进行验证,证明了此控制系统模型的可靠性,根据验证可知,本文所建立的控制模型是可靠的。
[1]张翔.纯电动汽车整车控制器进展[J].汽车电器,2011(2):7-11.
[2]郭温文.纯电动客车整车控制系统设计与控制策略研究[D].长春:吉林大学,2011.
[3]冯雷,李松,丁富强.电动汽车高压安全管理系统设计[J].科技与企业,2012(11):124-125.
[4]宋炳雨.纯电动汽车高压电安全管理系统研究与设计[D].重庆:重庆交通大学,2011.
[5] Holger Ross.Implementing Electromobile Ideas.electronil automotive,2012.
猜你喜欢
车主之友(2022年6期)2023-01-30 07:58:16
黄河之声(2019年23期)2019-12-17 19:08:43
汽车实用技术(2019年17期)2019-09-21 03:46:32
汽车维护与修理(2018年1期)2018-04-04 01:13:22
黄河之声(2017年13期)2017-01-28 13:30:17
汽车与安全(2016年5期)2016-12-01 05:22:12
汽车维修与保养(2015年12期)2015-04-18 07:51:46
现代企业(2015年4期)2015-02-28 18:48:11
汽车维护与修理(2015年5期)2015-02-28 12:16:34
警察技术(2015年6期)2015-02-27 15:38:33