基于时序分析的列车接近预警方法
2015-05-10 09:42李四辉蔡伯根单洪政
铁道学报 2015年10期
李四辉,蔡伯根,2,刘 江,2,王 剑,2,3,单洪政
(1.北京交通大学 电子信息工程学院,北京 100044;2.北京交通大学 北京市轨道交通电磁兼容与卫星导航工程技术研究中心,北京 100044;3.北京交通大学 轨道交通控制与安全国家重点实验室,北京 100044;4.北京佳讯飞鸿电气股份有限公司 产品技术部,北京 100095)
近年来,我国建设并已投入运营了多条设计时速300 km的客运专线及高速铁路,如京沪高速线、郑西线、武广客运专线等,有效促进了我国经济社会的稳步发展。在高速铁路列车运行过程中,高速列车作为为乘客提供生命安全服务的重要载体,其运行特征蕴含的安全性、可靠性是需要得到完全保证的重要因素。目前,针对高速列车的运行控制和调度管理,我国正在建设的300 km/h以上的客运专线及京沪高速铁路,均已确定采用以车载速度信号显示为主的高可靠、高安全的CTCS-3级列车运行控制系统作为统一技术平台,结合高速铁路调度指挥系统,为高铁列车的运行安全及运营效率提供支持。
在实际运行中,高速铁路列车运行控制系统不可避免地存在故障、失效等情况,如图1所示,美国近十年的列车碰撞事故/事件平均每年为163.5次,其中发生在干线的碰撞事故平均每年35.5次(数据均来源于美国联邦铁路管理局的Ⅰ级铁路事故/事件报告系统数据库(http://safetydata.fra.dot.gov/office of safety/),其中2014数据统计截止到4月)。因此,为进一步保障列车的运行安全,需采用独立的辅助技术手段作为安全保障。列车接近预警系统能够监视追踪列车的运行状态,当后方列车接近前方列车,存在潜在追尾碰撞危险时,系统能够向后方列车发出预警,提醒后方列车司机发现危险状况并及时做出安全响应,避免灾难性事故的发生[1]。在交通领域,避撞预警问题是重要的研究课题,如航海领域中的自动识别系统AIS(Automatic Identification System)[2];航空领域中的交通预警和避撞系统TCAS(Traffic Alert and Collision Avoidance System)[3];道路交通领域的车-车避撞系统V2V(Vehicle-to-Vehicle)以及车-路避撞系统V2I(Vehicle-to-Infrastructure)[4]。在铁路领域,2010年德国已经在一个轨道列车测试段演示了一种列车防撞系统[5];印度贡根铁路有限公司开发了一种列车防碰撞系统,命名为防撞装置网络(Anti-Collision Device Network)[6];美国阿拉斯加铁路公司开展了铁路防撞系统(Railroad Collision Avoidance System)研制项目[7];日本新干线也已有“车辆接近警报系统”用于实际运营[8]。

图1 美国近十年碰撞事故统计
结合国外目前列车接近预警系统的发展,为了保证我国铁路交通运输的稳定安全运行,我国自2011年开始研制与应用适用我国高速铁路的列车接近预警系统[9]。本文针对高速铁路列车接近预警系统,分别剖析列车安全避撞过程中的所有时序分量,通过时序分量的计算获得精确的列车安全接近时间。基于列车最大常用制动和紧急制动情况下的列车安全接近时间,研究适合于列车接近预警系统的安全预警方法。
1 列车接近预警系统
列车接近预警系统[10]是一套独立于既有信号系统,采用非信号模式,综合利用列车定位信息及安全预警逻辑实现对同线路、同方向运行列车的安全状态进行监测及接近预警的保障系统,对列车追踪运行中可能出现的危险情况以及信号系统失效导致的安全隐患提供合理、准确、高效的安全预警。列车接近预警系统包括地面子系统和车载子系统两部分,系统结构如图2所示。

图2 列车接近预警系统结构图
列车接近预警系统采用列车组合定位系统(GPS/北斗二代卫星导航系统、车轮传感器等)实现列车精确定位,通过车地无线通信网络(GSM-R/GPRS网络)进行列车位置信息(列车运行公里标、速度、方向等)的交互,地面监控中心的列车位置控制器TLC(Train Location Controller)接收运行线路中的列车位置信息,并进行综合检测、处理、位置判定逻辑计算、车间动态距离计算及列车接近安全预警决策,最终通过无线通信网络向后车发送预警信息。车载设备根据接收到的预警信息,在车载显示设备上向司机给出当前安全运行状态的提示,司机可以根据相关安全预警信号采取相应的安全措施。如图3所示,列车接近预警系统运行场景中的预警决策具体流程可以用统一建模语言UML(Unified Modeling Language)中的顺序图表示。
列车运行过程中,车载设备周期性(3 s)地向TLC发送列车位置报告,位置报告内容包括:车次号、车载设备ID、线路号、经纬度、速度、时间戳、公里标、运行方向。

图3 列车接近预警策略顺序图
2 列车安全接近时序分析
目前的预警决策主要基于列车间的距离,但对于时间因素并未详细考虑在内,为了查明列车安全接近时间分量的变化对列车接近预警的决策产生何种影响,本文针对列车安全接近过程中的时序分量展开分析,讨论列车接近的不同场景事件中的时序分量,以进一步精确计算列车安全接近时间。
2.1 安全接近过程分析
列车安全风险主要涉及列车间的距离和时间两个因素,列车接近预警过程涉及到位置信息交互时间、无线通信延时、司机的反应及其他时间因素,因此本文选择时间维度进行列车接近时序分析。针对列车接近时序中的列车位置信息交互时间、司机接收预警信号做出反应的时间、列车惰行时间、列车制动时间及安全防护时间展开详细分析。
安全接近时间SAT(Safety Approach Time)是从发现潜在碰撞威胁到恰好避免碰撞的时间间隔[11]。图4描述了列车安全接近过程中的基本时序分量。
如图4(a)所示,前车以100 km/h的速度行驶,后车以200 km/h的速度逐渐接近前车。
Ti时刻表示TLC检测到前后车辆存在潜在碰撞危险;Tk时刻表示后方列车开始采取制动措施;Tm时刻表示后方列车安全接近,恰好避免碰撞危险。
如图4(b)所示,SAT表示从Ti时刻到Tm时刻,后车从发现潜在危险、实施避险措施到最终恰好避免碰撞危险。本文中列车接近预警系统通过车载显示单元进行危险提示,因此司机有潜在的危险报警信号接收时间,在极端情况下Ti到Tm间的时长将会特别短(例如特殊情况下前车停车,后车高速运行且司机没有提前采取危险避撞措施)。假设司机接收到危险报警信息并做出危险避撞措施的情况下,Ti到Tm间的时长涉及到众多因素,包括前后车运行速度、前后车间距、司机反应时间、后车的制动系数等。

图4 列车安全接近时序分析
如图4(c)所示,SAT可以被分解为各时序分量,可用于分析减少潜在的事故危险,时序分量主要分解为3个时间阶段:
A.列车位置信息交互阶段:该阶段TLC接收前后列车位置报告信息,前后列车位置报告信息获取越迟,列车采取避撞措施的时间越少。
B.安全预警分析阶段:该阶段TLC根据列车位置报告进行前后相邻车排序、距离计算及接近预警决策,如果检测到潜在危险,将向后车司机发送安全预警信号。
C.列车安全避撞阶段:在确认碰撞危险的情况下,将采取必要的措施进行危险避撞。避撞时间与列车加速度、列车质量、列车速度等参数有关。列车常用制动是在正常情况下为调节或控制列车速度包括进站停车所施行的制动,称为“常用制动”,它的特点是作用比较缓和而且制动力可以调节。在紧急情况下为使列车尽快停止所施行的制动,称为“列车紧急制动”,其特点是作用全部的列车制动力,达到最大的制动效果。
2.2 时序分量
列车接近预警系统必须根据前后方列车的运行位置和运行状态进行分析评估,尽可能及时地向后方列车发送危险警告,同时为了使后方列车司机能够获得相应的警告类型并有针对性地采取避撞措施,可建立分级预警机制,充分分析安全避撞过程中的各时长分量,司机能够根据警告类型拥有充分的时间消除事故隐患。
各事件的时长分量是列车安全避撞过程中所用时间的组成部分,列车运行过程中的时间、位置、速度、运行方向、与前车的距离是决定能否与前车避撞的重要因素。
(1)位置信息交互时间
位置信息交互时间指的是TLC获取前后方列车所用的时间。当TLC同时获得前后方列车位置信息时为最短位置信息交互时间,等于0;当前方列车位置丢失时,TLC在20 s内未接收到前方列车位置信息,为最长位置信息交互时间。
(2)无线传输时间
无线传输时间表示消息车载设备通过无线通信方式与TLC进行信息交互所用的时间,列车接近预警系统中车载设备的位置报告信息长度为31 Byte,如图5所示,根据128 KB数据包传输延时的测试结果表明(测试数据来源于北京六捷科技有限公司),99.87%的测试延时小于1 500 ms,因此本文认为无线传输时间小于等于1 500 ms。
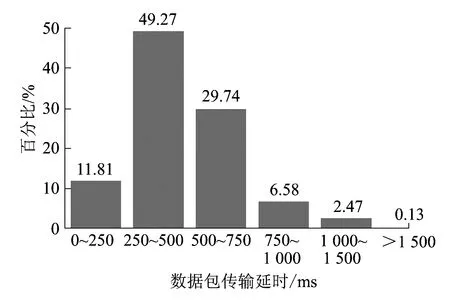
图5 数据包传输时延
(3)安全态势评估及预警决策时间
TLC接收到运行线路中列车的位置报告后,结合运行方向进行逻辑计算,确定线路上列车的前后顺序关系,然后根据公里标、方向和速度等运行状态信息实时地进行相邻两车运行状态安全评估,评估计算过程一般需花费1~105 ms。
接近预警决策过程中,TLC根据每个列车最新位置报告的时间戳和速度来计算接近预警等级,安全预警决策时间应当小于等于100 ms。
(4)司机反应时间
司机反应时间是车载单元向司机发出预警提示,司机接收到预警提示信息并采取相应的安全策略所用的时间。司机的反应时间对于列车安全避撞具有重要意义,司机反应时间取决于以下因素:司机制动反应时间、司机年龄、司机持续驾驶时间等。
根据相关规范[12],车载设备信息接收时间应不大于3.5 s。
(5)列车制动时间
列车制动过程[13]如图6所示,在动车组制动时间的计算过程中,由于动车组制动距离计算公式中没有列车换算制动率、闸片换算摩擦系数、常用制动系数,因此,列车减速度成为计算列车制动时间的一个重要参数。
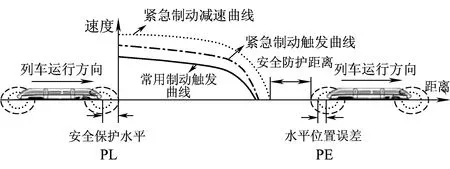
图6 列车制动过程示意图
列车的制动合力F[14]为
( 1 )
式中:M为列车的满载质量,单位为kg;f为列车制动力,单位为kN;g为重力加速度;w为列车基本阻力,单位为N/kN;we为列车附加阻力,单位为N/kN,包括坡道附加阻力、曲线附加阻力和隧道附加阻力;wa为空气阻力,单位为N/kN。
假设列车制动初始速度为vi(单位为km/h),列车制动目标速度为vt(单位为km/h),速度间隔为Δv=vt-vi(单位为km/h),无线传输时间为Tc,司机反应时间为Tr,列车回转质量系数为r。
无线传输时间内列车行走的距离Dc为
Dc=vi·Tc
( 2 )
司机反应时间内列车行走的距离Dr为
Dr=vi·Tr
( 3 )
假设列车在速度间隔Δv(vi~vt)内的制动合力不随速度变化而变化,根据列车牵引计算可以得到列车的制动距离Db和制动时间Tb为
( 4 )
( 5 )
列车总制动距离为列车安全制动距离与司机反应距离之和,列车总制动距离Ds和总制动时间Ts为
vi(Tr+Tc)
( 6 )
Ts=Tb+Tr+Tc
( 7 )
列车制动分为常用制动和紧急制动两种制动方式。
①列车常用制动时间
列车常用制动时间表示列车采取常用制动方式(制动系数为0.798),从实际初始运行速度Vi减速到安全运行速度Vt,达到列车避撞目的所用的时间。
列车正常运行时,主要采取常用制动,用于列车在运行过程中速度的调节或进站停车等。常用制动采用减速度控制方式,制动系统根据速度和司机控制器手柄级位确定所需的减速度,进而计算出应该施加的制动力。减速度和制动力会随着速度的不同而实时调整,制动力还会根据列车质量而自动调整。常用制动时,将充分发挥动力制动力,不足的制动力再由空气制动系统补充。
②列车紧急制动时间
列车紧急制动时间表示采取紧急制动方式使得列车紧急停车(Vt=0),施加紧急制动时产生最大制动力(制动系数为0.9),以达到最大减速度,保证列车在最短距离内安全停车,从而达到列车安全目的所用的时间。
紧急制动的主要目的就是使列车能够在尽可能短的距离安全停车。此时列车将以最大可能的制动力进行制动,从而尽可能地保证安全,远离危险源。
根据CTCS-3级列控系统相关计算规范规定,紧急制动和最大常用制动时间见表1。

表1 紧急制动和最大常用制动时间
(6)安全防护时间
安全防护时间表示列车走过安全防护距离所用的时间,由于列车安全制动曲线的计算以及测速测距等都存在一定的误差,故必须设置一段安全防护距离作为列车制动的目标点,防止由于计算、测量的误差造成列车碰撞安全隐患。原铁道部在CTCS-3级列控系统技术规范中规定,CTCS-3级列控系统的区间安全防护距离为110 m[13]。
列车安全制动模型中[13]安全防护距离的因素包括前行列车位置不确定误差(包括列车最大遛逸距离)、列车牵引、制动特性等。
①基于GNSS定位误差
列车接近预警系统基于GPS/北斗二代卫星导航接收机结合车轮传感器实现列车定位,由于列车定位仅在二维空间内进行[15],因此误差检验的对象取水平位置误差PE(Position Error)。出于安全性的考虑,在PE的基础上引入安全保护水平PL(Protection Level)。
PL定义了列车二维位置估计的不确定性,在一定的置信概率下将列车位置估计扩展到一个有界区域内。利用组合定位融合估计误差的相关参量,可以将列车位置拓展到列车的整体,为列车定位系统需向地面控制中心发送的车头、车尾位置增加安全裕量,构成完备的列车位置描述[16],如图6所示。
通过PE和PL的计算进一步为其增加安全距离,得到最不利前端/后端位置,它们之间的距离衡量了列车作为一个整体的位置不确定性。
根据系统要求,区间内列车位置误差的可接受范围为1.2 m,水平保护距离报警阈值设为20 m。
②列车惰行时间
列车惰行时间TCT(Train Coasting Time)包括列车启动制动系统延时时间、牵引卸载时间及制动空走时间。
根据相关规范规定[13],牵引卸载时间为0.6 s,启动制动系统时延时0.5 s,制动空走时间常用制动取1.5 s,紧急制动取2 s。
③紧急制动目标点与最大常用制动目标点位置差
车载ATP的紧急制动目标点和最大常用制动目标点不在同一位置,两者之间有一定的间隔,我国CTCS-3级列控系统取这两者的间隔为10 m[13]。
3 列车接近预警方法
3.1 列车安全接近时间计算
由图6可知后方接近列车与前车间的安全接近距离SAD(Safety Approach Distance)及后方列车安全接近时间SAT为
SAD=Ds+Dp+LT+2DPL+Dl
( 8 )
( 9 )
(10)

当后方列车采用紧急制动时,安全接近距离及安全接近时间分别为SAD′及SAT′,根据2.2节分析,SAD′、SAT′与SAD、SAT相比,仅制动系数及列车惰行时间不同,此处不再累述。
如图7所示,在前方列车匀速行驶的场景中,前方列车保持固定运行速度100 km/h,后方列车以200 km/h 的速度接近,此时后方列车采用最大常用制动及紧急制动方式安全接近前方列车的时空轨迹分别如图7中带圆圈的曲线和带矩形的曲线所示。

图7 前方列车匀速行驶
如图8所示,在前方列车静止的场景中,前方列车停止在20 km处,后方列车以200 km/h的速度从0 km 处开始接近前方列车。

图8 前方列车静止
由图7和图8可以得出:
(1)无论前车是否静止,当后车采用紧急制动方式时,后车制动目标速度为0。当后车采用常用制动,后车速度不大于前车速度时,认为后车安全接近前车。
(3)当后车分别采用常用制动和紧急制动时,以上场景中的SAT和SAT′相差8 s,考虑到在实际运行时列车接近预警过程中的时序分量误差,本文将前后车相距的SAT和SAT′间的时间差作为最后紧急告警时间。
3.2 列车接近分级预警
随着后车逐渐接近前车,为了向后车提供合理的预警信号而尽量不干扰司机的正常行车,本文基于SAT及SAT′将预警信号按照颜色划分为蓝色预警、黄色预警和红色预警3个等级[17]。
在列车行驶的过程中,为了保障列车安全,必须保证列车间以一定的安全间隔运行。基于移动闭塞原理,列车后方加上安全接近时间可以构成一个与列车同步移动的安全防护分区,本文定义为时间防护分区[18,19],通过保证列车前后的安全时间,使得列车能以较高的速度和较小的时间间隔运行,在保障列车运行安全的同时,提高运营效率。列车后方加上SAT为普通时间防护分区,列车后方加上SAT′为最小时间防护分区。
为了向后车提供列车接近预警,且更加清楚地表明当前所处的潜在危险状况,同时向后车司机提供合适的应对措施,如图9所示,基于SAT及SAT′将后车快速行驶接近前车的时间过程按照危险性等级划分为3个等级,并以不同的颜色表示。

图9 列车接近三级预警过程
蓝色预警:当后车与前车的时间间距小于等于2×SAT且大于等于2×SAT′时,后车与前车的时间间距已经在2×SAT以内,若后车继续以更高速度接近前车时存在潜在安全冲突风险,TLC向后车发送蓝色预警信号,司机接收到预警信号后应立即注意本车的运行状况,同时时刻关注前车位置动态。
黄色预警:当后车与前车的时间间距小于2×SAT′且大于等于SAT时,后车将接近普通防护分区,后车将有较高可能性继续以更高的速度接近前车,使得车间时间间距小于普通防护分区,因此存在安全冲突风险,TLC向后车发送黄色预警信号,司机接收到预警信号后应当立即采用常用制动降低列车速度。
红色预警:当后车与前车的时间间距小于SAT时,后车与前车的时间间距小于普通防护分区,存在严重的安全冲突风险,TLC向后车发送红色预警信号,司机应当立即采取紧急制动措施。
如图10所示,在前车静止的场景中,随着后车逐渐接近,TLC根据两车间的时距分别给出三级预警。
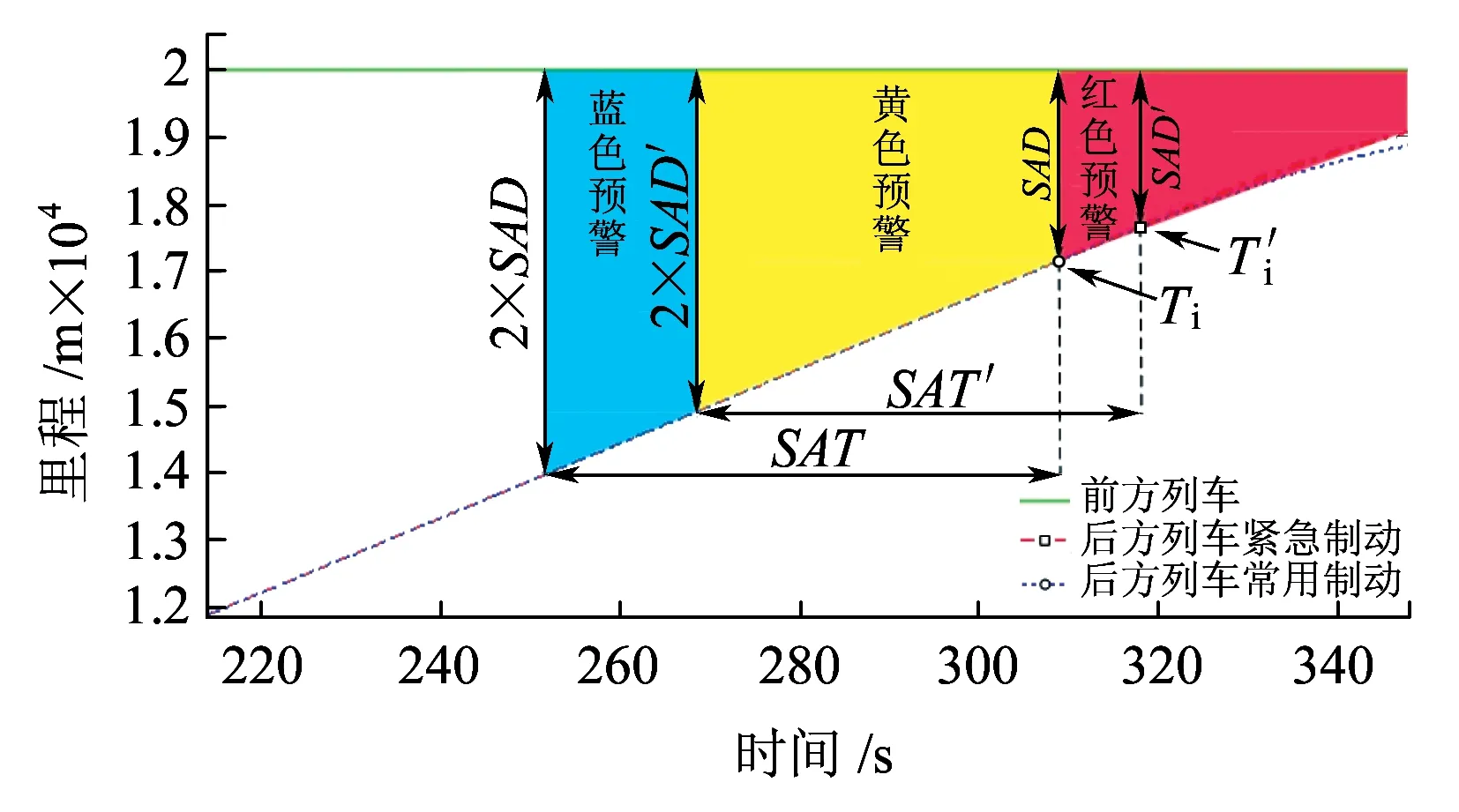
图10 列车接近分级预警
列车接近三级预警方法采用简单明了的蓝色、黄色及红色预警信号机制,在较好地表达列车接近风险等级的同时,司机能快速明确地确认危险情况,并根据要求做出相应的安全措施。
3.3 实验测试
2012年6月在汉宜铁路进行了列车接近预警系统现场测试,测试车型为CRH5A型动车组,测试线路包括汉宜铁路双向5个车站(包括汉口站、天门南站、潜江站、荆州站及宜昌站),如图11所示,测试场景为包括多个列车接近预警场景的两车追踪运行测试。

图11 汉宜铁路现场测试示意图
本文针对汉宜铁路现场测试中的实际数据,选取列车接近预警场景在实验室进行模拟测试,场景中前车以80 km/h的速度沿宜昌到汉口方向行驶,后车以200 km/h的速度逐渐接近前车。实验室模拟过程中分别将前车和后车车载处理单元的日志数据通过GpsGate进行模拟回放,列车接近预警监控程序进行数据接收及预警逻辑判断。
根据三级预警计算方法,在上述列车接近场景中,SAT′=79.8 s,SAT=107.8 s。基于SAT及SAT′的列车接近预警过程如图12所示。测试结果表明,列车接近预警方法能充分考虑列车接近过程中的时序分量,能够较好地运用于列车接近预警系统中,进一步保障列车运营安全。

图12 列车接近预警监控示意图
4 结论
本文针对列车接近预警系统,基于时序分析研究列车接近预警方法。首先分析了列车安全接近过程中的信息交互时间、无线传输时间、安全态势评估及预警决策时间、司机反应时间、列车制动时间以及安全防护时间等各时序分量,并分析计算了列车安全接近时间。基于SAT提出了列车接近分级预警方法,针对列车接近过程中的两车时距间隔,划分为蓝色预警、黄色预警及红色预警三级预警信号。但是目前仍有未完善的问题,主要包括:
(1)文中针对高速列车的运营情况,只对前后列车追尾相撞的场景进行了分析,为扩大列车接近预警系统的应用范围,下一步可以考虑其他列车相撞的场景。
(2)列车接近预警方法基于移动闭塞思想提出了时间防护分区,并以时间防护分区为基础进行分级预警,可以进一步建立列车接近风险评估方法,随着后车接近而实时评估列车接近危险性。
参考文献:
[1]王义惠,罗仁士,曹芳,等.铁路避撞系统RCAS的关键问题研究[J].铁道学报,2012,34(6):47-50.
WANG Yi-hui,LUO Ren-shi,CAO Fang,et al.Research on the Key Issues of Railway Collision Avoidance System[J].Journal of the China Railway Society,2012,34(6),47-50.
[2]AIS Official Website[EB/OL].http://www.navcen.uscg.gov/enav/ais/default.htm.
[3]International Standards and Recommended Practices for Aeronautical Telecommunications Volume IV:Surveillance and Collision Avoidance Systems[S].Quebec:International Civil Aviation Organization,2007.
[4]SUBIR B,RAYMOD T,FRANCOIS D.Vehicle-to-vehicle Wireless Communication Protocols for Enhancing Highway Traffic Safety[J].IEEE Communications Magazine,2006,44(1):74-82.
[5]CRISTINA G,ANDREAS L,THOMAS S,et al.Comparison of Collision Avoidance Systems and Applicability to Rail Transport[C]//In Proceedings of the 7th International Conference on Intelligent Transport Systems Telecommunications,2007:521-526.
[6]SIMSKY A,WILMS F,FRANCKART J P.GNSS-based Failsafe Train Positioning System for Low-Density Traffic Lines Based on One Dimensional Positioning Algorithm[C]//Proceedings of the 2nd ESA Workshop on Satellite Navigation User Equipment Technologies NAVITEC,2004:1-8.
[7]U.S.Department of Transportation,Federal Railroad Administration.Alaska Railroad Collision Avoidance System(CAS) Project[R/OL].2009,Research Report,RR09-16.http://ntl.bts.gov/lib/42000/42 900/42946/rr0916.pdf.
[8]HACHIGA A,AKITA K,HASEGAWA Y.The Design Concepts and Operational Results of Fault-tolerant Computer Systems for the Shinkansen Train Control[C]//The Twenty-Third International Symposium on IEEE,1993:78-87.
[9]LIU J,CAI B G,WANG J.An Analysis of Beidou Navigation Satellite System(BDS) Based Positioning for Train Collision Early Warning[C]//In Intelligent Vehicles Symposium(Ⅳ),2013:1065-1070.
[10]ANTONY T,ALICE Y.Collision Avoidance Timing Analysis of DSRC-based Vehicles[J].Accident Analysis & Prevention,2010,42(1):182-195.
[11]铁道第二勘察设计院.京沪高速铁路牵引计算初步说明书[R].成都:铁道第二勘察设计院,2005:28-29.
[12]Rail Transit Vehicle Interface Standards Committee of the IEEE Vehicular Technology Society.IEEE 1474.1TM IEEE Standard for Communications-Based Train Control(CBTC) Performance and Functional Requirements[S].The United States of America:the Institute of Electrical and Electronics Engineers.Inc.2005:32-34.
[13]中华人民共和国铁道部.CTCS-3级列控系统总体技术方案(V1.0)[S].北京:中国铁道出版社,2008.
[14]孙中央.列车牵引计算实用教程[M].北京:中国铁道出版社,2005:103-104.
[15]FILIP A,MOCEK H,BAZANT L.GPS/GNSS Based Train Positioning for Safety Critical Applications[J].Signal Draht,2001,93(5):51-55.
[16]LIU J,TANG T,CAI B G,et al.Integrity Assurance of GNSS-based Train Integrated Positioning System[J].Science China Technological Sciences,2011,54(7):1779-1792.
[17]BRAUN C C,MINE P B,CLAYTON S N.The Influence of Color on Warning Label Perceptions[J].International Journal of Industrial Ergonomics,1995,15(3):179-187.
[18]LEHNER A,de Ponte Müller F,STEANG T,et al.Reliable Vehicle-autarkic Collision Detection for Rail-bound Transportation[C]//In ITS World Congress,2009:1-8.
[19]STEANG T,MEYER M,HOERSTE M.A Railway Collision Avoidance System Exploiting Ad-hoc Inter-vehicle Communications and Galileo[C]//13th World Congress and Exhibition on Intelligent Transportation Systems and Services(ITS 2006),2006:8-12.
猜你喜欢
小猕猴智力画刊(2022年3期)2022-03-28
民用飞机设计与研究(2020年4期)2021-01-21
河南科学(2020年3期)2020-06-02
铁道建筑技术(2020年11期)2020-05-22
电子制作(2019年11期)2019-07-04
新传奇(2018年16期)2018-05-14
电子制作(2017年13期)2017-12-15
中国交通信息化(2017年12期)2017-06-06
人民交通(2016年5期)2017-01-05
自动化学报(2016年5期)2016-04-16