弓网动态仿真技术的现状及展望
2015-05-10 09:41关金发吴积钦
铁道学报 2015年10期
关金发,吴积钦,李 岚
(西南交通大学 电气工程学院,四川 成都 610031)
弓网系统通过受电弓与接触网滑动接触传输电能,弓网动力性能的好坏直接影响牵引供电质量。为保障电气列车的供电安全,弓网动态仿真是研究弓网相互作用的关键技术,对优化弓网接口尤为重要。
通过弓网动态仿真可以模拟弓网振动以及外部激励对弓网的影响,为优化弓网结构参数提供有力手段,在弓网系统设计、运营维修阶段的应用越来越广泛。本文针对弓网系统中弓网动态仿真技术的研究应用现状及发展趋势进行了综述。
1 全虚拟弓网动态仿真技术
全虚拟弓网动态仿真技术指的是仅利用计算机进行弓网动态仿真,可在弓网系统全生命周期使用。该仿真技术的研究思路是将线路、气象参数等作为边界条件,受电弓、接触网的设计结构参数作为变化量,以弓网动力性能作为评估量,确定最优弓网动力性能的弓网结构参数。其中弓网动力性能评估方法可参照文献[1]。
国外将全虚拟弓网动态仿真技术通过编程形成商业软件,为不同使用者提供开发环境,其中商业应用较多的有日本铁道综研开发的“架线道”、法国国铁(SNCF)开发的“OSCAR”、德国铁路股份公司(DB)开发的“PrOSA”、德国Balfour Beatty公司(BB)开发的“CATMOS”以及西门子公司开发的“SICAT Master”,以下分别介绍各自特点。
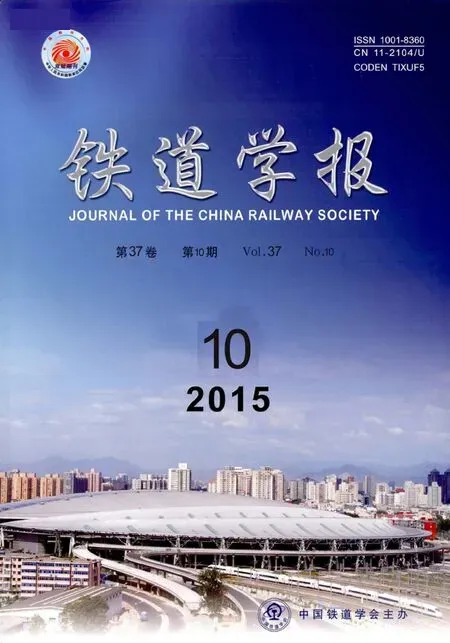
(1)架线道的接触网模型:承力索、接触线用弦来模拟,采用集中质量法;受电弓模型采用集中参数模型。其应用分析多弓振动、锚段关节布置及减振等,在日本有许多铁道公司使用,在中国用于广深港高铁接触网设计,其弓网系统仿真示意图如图1所示[2]。

图1 架线道弓网动态仿真模型
(2)1984年,法国国铁开发了OSCAR弓网动态仿真软件,该软件是利用MATLAB开发包openFEM编写的弓网动态仿真代码,接触网线索使用欧拉梁单元,受电弓可以等效为集中参数模型或多刚柔混合体运动模型,弓网接触通过接触函数求解,其接触网仿真模型如图2所示[3,4]。法国研制的OSCAR不仅是法国国铁高速接触网的设计软件,也是为优化欧洲弓网接口项目(EUROPAC)提供仿真工具[5]。
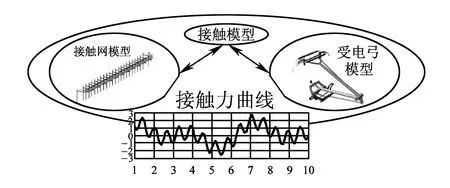
图2 OSCAR仿真示意图
(3)1996年起,德国DB开发了PrOSA弓网仿真软件,该软件也是利用有限元法建立弓网模型的,接触网线索为索单元或梁单元,吊弦仅受拉力,受电弓为集中质量模型,也可以为多刚体模型,其中多刚体模型通过SIMPACK商业软件建立,两者的接触力时间积分同步,其组成如图3所示[6]。

图3 德国DB弓网动态仿真系统组成
(4)德国BB公司的CATMOS弓网动态仿真软件的接触网模型是利用有限差分法开发的,受电弓使用集中参数模型。武广高速铁路、遂宁至重庆线、海南东线的弓网系统设计均利用该软件,其计算界面如图4所示[7]。
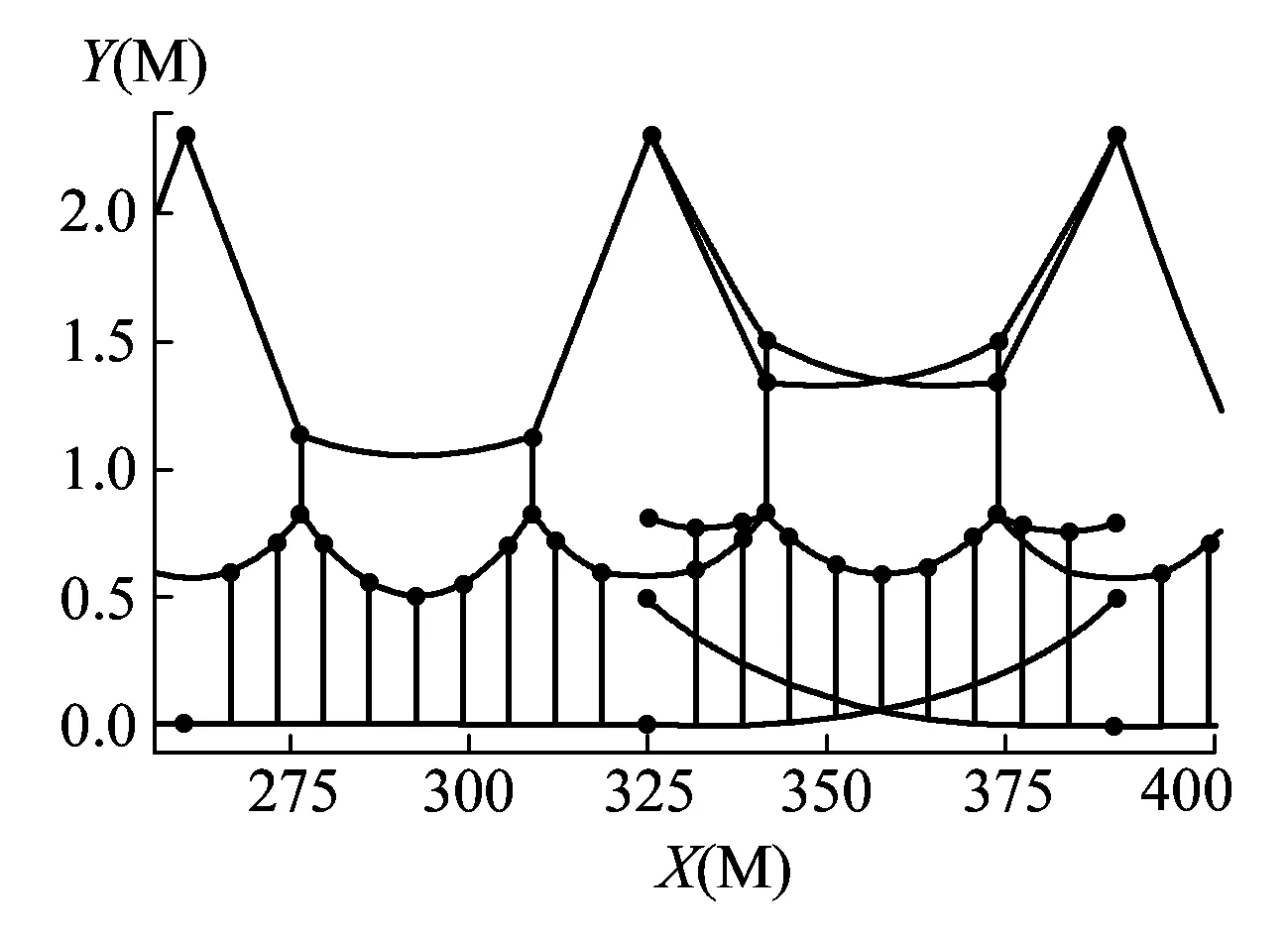
图4 CATMOS的接触网计算模型
(5)西门子公司开发的SICAT Master是基于大型通用软件ANSYS的二次开发产品[8]。该软件在西门子公司设计的各条高速线上均有使用,如京津城际高速铁路。
比较几种弓网动态仿真软件,除CATMOS利用有限差分求解外,其余均利用有限元法求解。架线道、CATMOS、SICAT Master的受电弓仅是集中质量模型,OSCAR和PrOSA留有与其他多体动力学分析软件的接口,便于受电弓结构参数的优化和主动控制的研究。
2 半实物半虚拟弓网动态仿真技术
半实物半虚拟的弓网动态仿真技术是指接触网动态参数通过计算机仿真,受电弓动态参数通过测试实际受电弓得到,两者通过伺服器连接起来,采集激振器位移和激振器与受电弓的接触力模拟接触网抬升和弓网接触力,其仿真原理示意如图5所示。
图5 半实物半虚拟仿真示意图
文献[9-12]分别建立了两个弓网半实物半虚拟试验台,意大利的试验台除了能提供受电弓垂直方向的振动来模拟弓网接触外,还提供接触网拉出值方向的滑动来模拟受电弓通过带拉出值的接触网;中国的试验台提供底座激振,而意大利的试验台则没有。
与全虚拟仿真相比,半实物半虚拟仿真用受电弓真实的物理模型减小建立受电弓数学模型时产生的误差,对于受电弓结构参数优化以及主动控制的研究十分有利。文献[11]测试法国两条高速线路,分别得到300 km/h运行的ATR95受电弓与C270接触网以及CX受电弓与LN2接触网的实测数据,与半实物半虚拟试验台的接触线抬升与接触力进行比较,发现半实物半虚拟弓网动态仿真数据与实测数据很接近,验证了其有效性。文献[9]利用半实物半虚拟仿真研究适用于DSA380型受电弓的接触网结构参数。
全虚拟仿真与半实物半虚拟仿真有各自优缺点:全虚拟弓网动态仿真中的受电弓建模需要使用受电弓振动试验台来测量受电弓的等效集中参数,或受电弓的多体模型连接刚度阻尼等参数;全虚拟仿真中的受电弓结构参数可以任意改变,这一点比半实物半虚拟仿真具有优势;另外,全虚拟仿真的成本比半实物半虚拟仿真要少。
3 弓网动态仿真建模方法
弓网动态仿真模型的建立有3种方法,分别是直接求解达朗贝尔波动方程;运动方程半离散处理求解,包括模态方程和波动方程离散法;基于离散方程,即弓网系统的有限元方程。
3.1 直接解连续方程
文献[13]中的接触网为欧拉梁,忽略吊弦的弯曲、承力索的弛度、定位装置的刚度,接触网整体为线弹性模型,受电弓简化为移动力,弓网仿真模型如图6所示,通过偏微分软件直接求解波动方程,如式( 1 )所示。

图6 接触网波动方程模型

( 1 )
式中:w1(x,t)、w2(x,t)分别为接触线和承力索的垂向位移,是时间和空间的函数;E1J1、E2J2分别为接触线和承力索的抗弯刚度;N1、N2分别为接触线和承力索的张力;ρ1、ρ2分别为接触线和承力索的单位长度质量;p(x,t)为吊弦内力;pF(x,t)为接触力;pP(x,t)为承力索悬挂点反力。
吊弦力、承力索支反力均是沿接触网离散布置的,位置不变,接触力位置是变化的,力也随时间变化,均可用狄拉克函数表示,见式( 2 )~式( 4 )。
( 2 )
pF(x,t)=F(t)·δ(x-vt)
( 3 )
( 4 )
式中:c为吊弦刚度;b为吊弦阻尼;n为吊弦数量;xn为吊弦位置;F(t)为接触力大小;v为速度;k为悬挂点刚度;j为悬挂点数量;xj为悬挂点位置。
3.2 基于半离散化的求解
半离散指的是利用模态方程将波动方程离散化得到弓网节点位移和节点力的数值方法。
模态叠加法是求解动力学方程常用的方法之一,文献[10]将接触网简化为平面垂向运动,其模型如图7所示。假设接触线和承力索由两个模态方程组成,如式( 5 )所示,吊弦、悬挂点等效为弹簧。

图7 接触网模态方程模型

( 5 )
列写模型的总动能T和总势能方程V,其中总动能包括接触线、承力索、支持点、定位点、吊弦点的动能,总势能包括接触线和承力索的抗拉和弯曲、支持弹簧、定位弹簧、吊弦弹簧的势能。利用第二类拉格朗日动力方程(式( 6 )),得到接触网的运动微分方程,如式( 7 )所示,求解式( 7 )得到特征值和特征向量,其中特征值为接触网的固有频率,特征向量为接触网的阵型。最后加入接触力,通过阵型叠加得到接触网的节点位移。
( 6 )

( 7 )
文献[14-16]直接将承力索等效为弦接触线等效为欧拉梁的波动方程,受电弓为质量弹簧模型,接触力直接耦合在波动方程中,将上述方程组合成偏微分代数方程,再利用有限差分法或有限元法求解。
3.3 基于全离散化的求解
直接利用有限元法直接将弓网模型离散化,接触网和受电弓等效为若干个有限单元,再通过坐标转换,组合成整体动力方程进行节点力和位移求解,其应用最广泛,能解决复杂的弓网动力问题,模型与真实比较接近。
文献[17]利用有限元建立简单链型悬挂并进行静态计算和弹性计算。文献[18]利用有限元法建立接触网模型,如图8所示。文献[19]给出有限元的计算方法,其中接触网为欧拉梁单元和受电弓为等效质量单元的运动方程见式( 8 )、式( 9 )。

图8 接触网的有限元模型
( 8 )

( 9 )
式中:Mc、Mp、Cc、Cp、Kc、Kp分别为接触网和受电弓质量、阻尼、刚度矩阵;xc、xp为接触网和受电弓的节点矩阵;Fcc为接触网的吊弦节点受力矩阵;Fcp为接触力矩阵;Fpp为受电弓空气动力和抬升力矩阵。
文献[20]将受电弓等效为多刚体系统,接触网用有限元法建立,接触网和受电弓运动方程见式(10)和式(11),弓网接触力也是采用罚函数法计算,其方程见式(12)。
(10)
(11)
(12)

比较3种建模方法,基于达朗贝尔方程的计算,弓网模型简单,一旦模型复杂,求解起来困难;基于半离散化的计算,模型要比达朗贝尔法更接近真实情况,但一般为二维;基于全离散化的计算,弓网模型可以是线性也可以是非线性,可以是二维也可以是三维。接触网与受电弓的几乎所有数值模型均可计算,进一步利用有限元法进行弓网动态仿真是弓网仿真技术的发展方向。
4 减小弓网振动和故障的仿真分析
利用全虚拟弓网仿真技术能有效地减少弓网振动程度和故障数量,以下分别说明其应用状况。
4.1 优化受电弓和接触网的结构参数
受电弓与接触网两者机械性能的匹配是研究弓网关系的关键问题,利用弓网动态仿真技术,比较不同弓网结构参数的弓网动态性能指标,得到匹配性最优的弓网结构参数,是解决这一问题的有效手段。
文献[21]将受电弓与接触网的结构参数优化问题转化为线性规划问题,设计函数为弓头质量、阻尼和刚度,其中弓网质量的变化范围为原值的0.8~1.2倍,阻尼为原值的0.1~100倍,刚度为原值的0.8~1.2倍,约束条件为平均接触力等于150 N以及实际的接触力标准差小于0.3倍的平均接触力,目标函数为实际接触力标准差最小,其他弓网结构参数相同,优化后得到新的受电弓参数。
文献[22]利用有限元法建立弓网振动模型,通过比较不同速度等级下的不同弓头、框架刚度和阻尼、不同静态抬升力、不同接触线张力下的接触力统计量和弓网离线率,得到优化后的受电弓结构参数和接触线张力参数。
文献[23]研究双弓受流的弓网振动情况,比较接触力标准差、弓头运动轨迹等参数,得到减小前弓的静态升弓力,可以优化后弓的弓网动态性能,使双弓的动态性能均能满足标准的要求。
文献[24]利用弓网动态仿真技术,建立4种锚段关节模型(见表1),在同样的受电弓结构参数下,比较不同速度的接触力统计量和离线率,得到类型3即第2支接触悬挂比第1支接触悬挂高0~30 mm时的弓网动态性能最优。

表1 4种锚段关节结构
注:锚段关节从左到右依次为第1支悬挂和第2支悬挂,受电弓运行方向为从左到右。
外界环境也会对弓网系统的运行安全产生影响,比如大风区段、大雪区段、污秽区段等。文献[25]将风的功率谱输入到弓网动态仿真模型,得到不同平均风速下脉动风载荷作用的接触网风振响应,为兰新线大风区段接触网结构参数选取提供依据。
文献[26]利用计算机建立多体受电弓,并通过CFD仿真,研究其空气动力,通过弓网仿真研究对弓网动态性能的影响,提出考虑了受电弓气动力学后,弓网接触力标准差变大并引起弓网离线,建议优化受电弓结构,减少受电弓气动力。
4.2 利用弓网仿真进行故障特征识别
利用弓网动态仿真,人为建立与实际相符的弓网故障样本,通过机器学习方法,识别故障特征数据或曲线,通过实际检测数据验证故障特征数据的准确性,可以有效减少人力成本。
文献[27]通过弓网动态仿真模拟弓网的吊弦断裂故障,得到相应的弓网接触力,利用自适应小波技术,比较历史接触力数据和故障接触力数据,如图9所示,得到吊弦故障的接触力特征,当得到实际检测到的弓网接触力数据时,利用同样方法,识别接触力中吊弦故障数量和故障点。

图9 比较正常与故障吊弦的接触力
文献[28]建立接触网的实体模型,模拟弓网振动时对接触线产生的应力应变,研究接触线的疲劳机理。
4.3 设计受电弓的主动控制
传统受电弓的控制方法是调整静态抬升力,但是静态抬升力不能随意调整,调整的目标是满足弓网动态性能在合理范围内,具体指标见文献[1],使接触力的均值和标准差小,以减少弓网的振动和摩擦磨损。利用现代测控技术和弓网动态仿真技术,受电弓的控制方法由原来的单值控制发展为主动控制。
文献[29]提出基于气缸模型的受电弓主动控制方法,其控制原理为气缸输出的静态抬升力与弓头加速度、速度与一定增益乘积相等,通过调整反馈增益达到减小接触力标准差的作用,控制模型如图10所示,并通过虚拟弓网动态仿真验证其有效性。

图10 基于气缸反馈的受电弓主动控制模型
受电弓的主动控制是结合虚拟受电弓和实体受电弓实现的,先在虚拟受电弓上比较不同控制方法的控制效果,得到最优控制,再在实体受电弓上实现。虚拟受电弓控制利用的是全虚拟弓网动态仿真技术加上控制理论实现,实体受电弓控制利用半实物半虚拟弓网动态仿真技术加上控制器设计实现。
5 弓网动态仿真技术的发展展望
目前全虚拟弓网动态仿真的应用较多,弓网仿真模型相对简单,且受电弓的集中参数模型大多未通过实验手段获取,弓网动态仿真模型未通过标准验证,因此,未来弓网动态仿真技术研究可重点解决以下问题:
(1)弓网动态仿真模型的验证
在使用弓网动态仿真技术前,必须验证弓网动态仿真模型的有效性,需要根据EN50317[30]进行现场弓网动态性能测试,获取弓网接触力、接触线抬升等实际数据,参照EN50318[31]中条款5~11进行弓网动态仿真模型的确认。确认分两步完成,第一步应满足条款11提供的弓网参考模型的弓网动态性能要求,第二步是与实测值进行比较,若符合实测值,仿真模型可参照条款10.2调整部分参数。
(2)研究复杂模型的弓网动态仿真
既有受电弓与接触网的仿真模型比较简单,接触网一般仅考虑为接触悬挂的形变,承力索支持点为固定点,接触线定位点或忽略或连接弹簧,忽略其他接触网结构,受电弓一般等效为集中质量模型。受电弓的集中质量模型需要通过测量手段得到。该仿真模型主要分析接触悬挂的振动情况以及弓网的动态性能,对于受电弓和接触悬挂以外的结构不能进行进一步分析及结构优化。为分析弓网振动或外部激励引起的弓网结构振动和疲劳寿命,接触网的支持结构、支柱、硬横梁、隧道支持装置等结构需要在仿真分析中进一步建立相关模型。受电弓的多体模型也需进一步得到发展,以满足受电弓结构的优化。针对受电弓和接触网的特殊部位,如:定位装置、吊弦、旋转底座、螺拴、弓头弹簧箱、平衡杆连接部位等,在建模时需要充分考虑其非线性力学特性。
(3)利用仿真获取弓网故障特征数据
把故障的弓网信息输入弓网模型,进行动态仿真,通过与标准状态弓网模型的动态性能作比较,利用信号处理技术,分析接触力或接触线抬升等数据,识别故障点和故障特征。利用弓网动态仿真技术得到故障特征后,通过实际线路制造故障,确认仿真得到的故障分析技术。利用该研究思路,可进一步研究吊弦断裂、弹性吊索断裂、定位装置卡滞等故障的接触力或抬升特征数据。
(4)研究受电弓主动控制装置
受电弓主动控制装置是安装在受电弓上,用以调整弓网接触力的设备。目前研究受电弓主动控制技术的大多针对虚拟控制策略,离实际受电弓控制装置研制还有很大差距。若要研制受电弓的主动控制装置最好利用半实物半虚拟弓网动态仿真技术来实现,并最终通过实测数据验证该装置的有效性。
(5)开发中国的弓网动态仿真商业软件
弓网动态仿真是未开通接触网设计的必经途径,是开通后接触网维修的有效工具。目前弓网动态仿真大多是自行编程完成,仿真的有效性难以得到保证,而且中国铁路地域跨度大,弓网结构类型繁多,不同环境条件下的受电弓、接触网结构不同,为保证弓网动态仿真的有效性和高适用性,有必要开发弓网动态仿真商业软件。
随着弓网动态仿真技术进一步发展,弓网动态仿真技术在优化弓网结构、研究弓网故障和受电弓主动控制等方面有广泛的应用前景,与弓网动态测量相互补充,实现弓网接口优化,为接触网设计、施工、运用与维护提供研究工具。
参考文献:
[1]李岚.高速弓网系统动态性能的评估方法[R].高速铁路接触网系统新技术研讨会论文集,2010.
[2]铁道综合技术研究所.接触网与受电弓特性[M].北京:中国铁道出版社,2010:68-73.
[3]MASSAT J P.Pantograph-catenary Dynamics Simulation[J].Vehicle System Dynamics,44:S1,551-559.
[4]BOBILLOT A.Design of Pantograph-catenary Systems by Simulation[C]//UIC Proceedings of 9th World Congress on Railway Research,2011.
[5]European Commission.European Optimised Pantograph-catenary Interface[EB:OL].Ec.europa.eu/research/transport/projects/items/europac_en.htm.
[6]Thorsten Schulze.Validated Simulation Tools for Reliable Investigations of the Catenary-pantograph Interaction[C]//UIC Proceedings of 1th World Congress on Railway Research,2001.
[7]JIAN L.Overhead Line Simulation Research for Wire Tensile Forces Optimization[C]//Proceedings of the 1st IWHIR,Vol.1,LNEE 147,2002,pp.309-317.
[8]GERHARD Mu ller.Engineering Applications of ANSYS® Inside Siemens AG[EB:OL].http://www.auc-ev.de/fileadmin/ANSYS_in_DACH-und-Geschichte/wp_siemens.pdf.
[9]梅桂明.利用半实物半虚拟试验方法研究接触网参数对弓网接触力的影响[J].铁道学报,2004,26(1):33-39.
MEI Gui-ming.Study on Influence of Catenary Parameters on Contact Forceby Method of Hybrid Simulation[J].Jounral of the China Railway Society,2004,26(1):33-39.
[10]梅桂明.受电弓-接触网系统动力学研究[D].成都:西南交通大学,2010:83-99.
[11]FACCHINETTI A.Hardware-in-the-loo Phybrid Simulation of Pantograph-catenary Interaction[J].Journal of Sound and Vibration,2012,(331):2783-2797.
[12]Alan Facchinetti.Hardware-in-the-loo POverhead Line Emulator for Active Pantograph Testing[J].Ieee Transactions on Industrial Electronics,2009,56(10):4071-4078.
[13]Anna Kumaniecka.Modelling and Identification of Catenary-pantograph System[J].Journal of Theoretical and Applied Mechanics,2003,41(4):887-901.
[14]SIMEON B.Coupling Daes and Pdes for Simulating the Interaction of Pantograph and Catenary[J].Mathematical and Computer Modelling of Dynamical Systems,2005,6(2):129-144.
[15]Gunnar Teichelmann.Modelling and Simulation of Railway Cable Systems[J].Math.Mech.2005,85(12):864-877.
[16]PETER R,SCOTT.Computer Evaluation of Overhead Equipment for Electric Railroad Traction[J].Ieee Transactions on Industry Applications,VOL.IA-10,NO.5,1974:573-580.
[17]吴天行.接触网的有限元计算与分析[J].铁道学报,1996,18(3):44-49.
WU Tian-xing.Analysis and Calculation of Catenary by Fem[J].Jounral of the China Railway Society,1996,18(3):44-49.
[18]Kyu Ho Lee.Finite Element Analysis of a Three Dimensional Catenary System for a Highspeed Railway[C]//16th International Congress on Sound and Vibration,Kraków,Poland,2009.
[19]Andrea Collina.Numerical Simulation of Pantograph-overhead Equipment Interaction[J].Vehicle System Dynamics,2002,38(42):261-291.
[20]Jorge Ambrósio.A Computational Procedure for the Dynamic Analysis of the Catenary-pantograph Interaction in High-speed Trains[J].Journal of the Oretical and Applied Mechanics,2012,50(3):681-699.
[21]Jorge Ambr′osio.Optimization of High-speed Railway Pantographs for Improving Pantograph-catenary Contact[J].Theoretical & Applied Mechanics Letters 3,2013.
[22]NING Z.Investigation on Dynamic Performance and Parameter Optimization Design of Pantograph and Catenary System[J].Finite Elements in Analysis and Design,2011,47:288-295.
[23]Giuseppe Bucca.Adoption of Different Pantographs Preloads to Improve Multiple Collection and Speed up Existing Lines[J].Vehicle System Dynamics:International Journal of Vehicle Mechanics and Mobility,2012,50(S):403-418.
[24]Masatoshi SHIMIZU.Improvement of Structure of Contact Wire on Overlap Sections of Shinkansen[J].QR of RTRI,2000,41(4):159-162.
[25]曹树森.强风地区接触网动力稳定性分析[J].中国铁道科学,2010,31(4):79-83.
CAO Shu-sen.The Dynamic Stability Analysis of the Catenary Systems in Strong Wind Area[J].China Railway Science,2010,31(4):79-83.
[26]POMBO J.Influence of Theaerodynamic Forces on Thepantograph-catenary System for High-speed Trains[J].Vehicle System Dynamics,47(11):1327-1347.
[27]Jean-pierre Massat.Modélisation du Comportementdynamique du Couple Pantographe-catéNaire[D].Docteur Del’école Centrale De Lyon,2007:139-168.
[28]MASSAT J P.Fatigue Analysis of Catenary Contact Wires for High Speed Trains[C]//Uic Proceedings of 9th World Congress on Railway Research,2011.
[29]吴燕.高速受电弓-接触网动态性能及主动控制策略的研究[D].北京:北京交通大学,2011:137-147.
[30]EN50317:2002.Railway Applications-current Collection System-requirement for and Validation of Measurements of the Dynamic Interaction Between Pantograph and Overhead Contact line[S].Brussels:Cenellec,2002.
[31]EN50318:2002.Railway Applications-current Collection System-validation of Simulation of the Dynamic Interaction Between Pantograph and Overhead Contact Line[S].Brussels:Cenellec,2002.
猜你喜欢
铁道机车车辆(2022年1期)2022-03-24
铁道学报(2020年8期)2020-09-07
哈尔滨铁道科技(2020年4期)2020-07-22
电子制作(2019年14期)2019-08-20
劳动保护(2019年3期)2019-05-16
铁道通信信号(2019年2期)2019-03-26
铁道学报(2018年5期)2018-06-21
汽车实用技术(2015年8期)2015-12-26
计算机辅助工程(2012年5期)2012-11-21