基于卫星定位的区间列车轨道占用检测方法研究
2015-05-10 09:42蔡伯根上官伟
铁道学报 2015年10期
王 剑,郑 波,蔡伯根,2,刘 江,2,上官伟
(1.北京交通大学 电子信息工程学院,北京 100044;2.北京交通大学 轨道交通控制与安全国家重点实验室,北京 100044;3.北京市轨道交通电磁兼容与卫星导航工程技术研究中心,北京 100044)
列车运行控制系统是根据列车在铁路线路上运行的客观条件和实际情况,对列车运行速度及制动方式等状态进行监督、控制和调整的技术装备[1]。
在列车运行控制系统中,及时准确地了解列车所在的位置十分重要。列车在区间运行时,列车运行控制系统需要准确地知道列车位置,确定列车在轨道中的占用,从而生成列车行车许可,这对列车在区间的安全运行非常重要。因此,列车运行控制系统必须以很高的可靠性确认列车的轨道占用。
随着卫星定位技术的不断发展,卫星定位服务已经逐渐引入铁路领域,这对列车定位的方式产生了重要影响。GNSS是一种以卫星为基础的无线电导航系统,可发送高精度、全天时、全天候的导航、定位和授时信息。目前GNSS主要包含美国的GPS、俄罗斯的GLONASS、欧洲的Galileo以及中国的北斗。采用GNSS的列车定位系统可以提供列车的精确位置、速度及时间等信息[2]。
采用卫星导航作为定位手段的列车运行控制系统是近年来世界各国研究的热点。该定位方式可以去除地面轨道电路,降低铁路信号系统的建设和运营维护成本,尤其在运量较低及区域性的铁路线路上,这种列车运行控制系统受到了较多关注[3]。
在准确的卫星定位的基础上才能实现列车轨道占用检测,但受到GNSS定位误差和定位精度不足的影响,列车的定位结果往往存在一定的偏差。因此,本文提出一种通过估计列车头部、尾部位置的定位误差来确认列车轨道占用的方法。
1 基于GNSS的列车轨道占用检测原理
ERTMS-Regional是欧盟在ETCS-3级基础上提出的一种能使区域性铁路在更新或引入新的信号设备时节约成本的方案。利用车载设备进行轨道占用检测,为后面的列车提供安全进路信息。点式设备(应答器)、GSM-R成为系统的主要设备。
LOCOPROL是受欧盟第五个科技发展框架计划资助的GNSS列车定位示范项目,其目标就是研究和试验一种创新的基于卫星的低成本、故障安全型列车定位系统。LOCOPROL主要的创新之处在于为铁路信号系统引入了全球卫星定位技术,开发出一种无需加装Kalman滤波装置的低成本、故障安全型轨道占用检测。
美国PTC系统是基于无线通信的列车控制系统CBTC(Communication Based Train Control System)的一种形式,它使用差分全球定位系统DGPS进行轨道占用检测,使用车载计算机、数字无线通信实现机车与控制中心的通信。
北京交通大学GPS实验室在低成本列控系统数字轨道地图、虚拟应答器、基于GNSS的轨道占用检测等方面开展了相关研究。虚拟应答器技术已经成功地在北京交通大学研制的接近连续式无线机车信号中进行了实验。
在列车头部、尾部安装卫星导航接收机,即可获得列车头部、尾部的位置坐标。在列车运行过程中,受到可见卫星数、卫星空间几何分布等影响,会产生一定的定位误差。列车水平保护距离是指车头、车尾的定位导航接收机在给定误警概率和漏检概率条件下所示的最不利位置间距。如果在列车运行过程中,能够实时得出列车水平保护距离,那么就可以得到列车占用的轨道位置区间。
已有的区间列车轨道占用检测方法是利用轨道电路、应答器或计轴器等地面设备来确定的,可以准确得出列车占用的轨道位置,但是其建设和运营成本较高。基于GNSS的列控系统轨道占用检测提出了列车水平保护距离的概念,在一定的漏检率和误检率的条件下,扩大了列车占用的估计,得到列车占用的轨道位置区间,降低了建设和维护成本。
为了解决依靠GNSS确定列车所在区间占用时遇到的困难,本文通过分析定位误差概率分布,在满足安全标准的漏检率和误检率的前提下,计算出列车水平保护距离,并根据列车运行情况添加一定的安全保护距离SD(Safety Distance),即可确定可靠的列车轨道占用估计,如图1所示。

图1 区间列车轨道占用示意图
如图1所示,HPLHOT为车头位置卫星定位水平保护距离;HPLEOT为车尾位置卫星定位水平保护距离;SDHOT为车头位置安全保护距离;SDEOT为车尾位置安全保护距离。实现区间列车占用检测最直观的方法,就是获取车头和车尾在轨道上的位置、定位水平保护距离及安全保护距离,确定区间列车在闭塞分区的占用。安全距离经验值一般取30 m。
上述位置估计得出的仍是二维坐标,需要地图的配合,得出一维的估计,所以需要使用地图和地图匹配技术。
地图匹配技术在基于卫星定位的列控系统中有着极其重要的作用。其思想核心就是将卫星定位结果匹配到列车运行的轨道线路上,也就是用线路公里标来表现三维空间坐标,达到校验卫星定位误差的目的[4]。
轨道电子地图是一种专门用于铁路领域的数字电子地图,由于铁路线路的特殊性(线路建成后基本固定不变),可以通过高精度设备采集线路位置信息、关键点信息,例如信号机位置、道岔位置等,并将其按照一定的结构存储。轨道电子地图对于依靠卫星导航定位的系统有着重要作用,是一种提高定位精度的有效方法[5]。
本文主要研究区间列车轨道占用检测,因此主要对区间列车的定位进行轨道电子地图匹配。铁路区间线路的主要特点是线路简单,本文采用垂直投影法确定列车的当前位置,定位点垂直投影算法如图2所示[6]。

图2 垂直投影算法
垂直投影方法过程如下:
步骤1在定位点P0(x0,y0)所匹配的线路数据库中,寻找与P0(x0,y0)点距离最短的点P1(x1,y1)。
步骤2在线路数据库中找出与点P1(x1,y1)相邻的两点P2(x2,y2)、P3(x3,y3),分别计算与P0(x0,y0)的距离,得出距离较小的点P2(x2,y2)。
步骤3将P0(x0,y0)垂直映射在P1(x1,y1)、P2(x2,y2)的连线上,得到线路匹配点P(x,y)。
根据直角三角形勾股定理及海伦公式可以确定匹配点P(x,y)。
( 1 )
轨道电子地图一方面用来辅助列车在铁路线路中的定位,提高列车在运行过程中定位的准确性,另一方面可以用于辅助区间列车包络占用的检测,减小占用监测的误差。
在列车运行过程中通过卫星导航接收机获取车头、车尾的实时位置,由于存在定位误差,其定位结果不可能直接落在轨道上,通过之前所述的地图匹配算法将定位点投影到轨道上,轨道电子地图数据库中每一个经纬度都对应一个公里标,将实时计算出的水平保护距离HPL结合列车车头和车尾的公里标再加上一定的安全距离,即可确定区间列车占用[7]。在不同时刻,计算出的水平保护距离是不同的,其占用范围也就不同,如图3所示。

图3 不同时刻轨道占用示意图
假设列车运行方向为公里标增大的方向,则不同时刻所得的区间列车占用Srange(i)可以表示为
SEOT(i)-HPLEOT(i)-SDEOT(i)≤Srange(i)≤
SHOT(i)+HPLHOT(i)+SDHOT(i)
式中:SHOT(i)为第i时刻车头位置公里标;SEOT(i)为第i时刻车尾位置公里标;HPLHOT(i)为第i时刻车头位置水平保护距离;HPLEOT(i)为第i时刻车尾位置水平保护距离;SDHOT(i)为第i时刻车头安全保护距离;SDEOT(i)为第i时刻车尾安全保护距离。
计算出HPL和SD后,得到列车最差前端/后端位置,它们之间的距离衡量了列车作为一个整体的位置不确定性,将该距离用公里标表示即可得到列车在区间上的占用。不同的列车类型、线路情况会有不同的SD经验值,本文取30 m。HPL的值要根据卫星空间分布、接收机伪距等信息实时计算得出。
轨道交通信号系统应遵循“故障导向安全”的基本原则。在卫星定位接收机故障或无线通信故障导致列车无法完成自主定位的情况下,车载设备将采取停车等必要手段防止列车冒进,以确保故障后的安全性,确保列车的安全运行。
2 列车轨道占用估计算法
基于卫星定位的解算过程能够为位置估计量提供相应的不确定性元素,将其用于HPL的计算,即利用估计不确定性及其相关量将某种特定的检验统计量投影到位置域。
2.1 卫星定位解算算法
为了确定卫星定位接收机的三维位置(Xu,Yu,Zu),需要在可见卫星中选择4颗卫星进行伪距测量,产生伪距方程组
ρi=‖sj-u‖+ctu
( 2 )
式中:ρj为第j颗卫星的伪距;xj、yj、zj为第j颗卫星的三维位置。

Δρ=HΔx
( 3 )
即
Δx=H-1Δρ
( 4 )
其中
式中:axj、ayj、azj各项表示由近似用户位置指向第j号卫星的单位矢量的方向余弦。通过获取4颗卫星的伪距信息和星历信息,利用上述方程将这4个未知量Δxu、Δyu、Δzu、Δtu求解出来,算出Δx,便可得出定位点的坐标(xu,yu,zu)和接收机钟差tu,可以接受的位移取决于用户的精度要求。
考虑测量噪声的线性化GPS测量方程为
y=Hx+ε
( 5 )
式中:ε为n×1阶测量误差矢量。
2.2 基于奇偶变换的定位误差估计算法
在实时定位过程中,不能直观地获取位置误差,必须通过定位点的观测量来推出,这就是奇偶矢量变换的思想[8]。
针对式( 5 ),对y进行变换,p=Py,奇偶变换矩阵P定义为(n-4)×n阶矩阵,可以通过H矩阵的QR分解获得。P的各行相互正交,大小归一,并与H的各列相互正交。对于ε具有独立的随机元素,且全部服从N(0,σ2)分布。
奇偶矢量变换算法的输入量是测量误差的标准差、测量卫星几何分布以及允许最大的虚警概率和漏检概率。该算法的输出量是HPL,规定了对于虚警概率和漏检概率而言能检测出的最小水平径向位置误差。


式中:λ是非中心参量,它是用归一化均值m和自由度k定义的,λ=km2。
对于6颗可见卫星情况下的χ2密度函数(2自由度)如图4所示。这些密度函数用于规定检测阈值,以满足虚警概率和漏检概率的要求。最小检测概率是0.999,漏检率为10-3。

图4 自由2的密度函数
图5为每颗可见卫星的特征斜率线,由估计的线性无噪声模型得出,它代表了水平位置误差与校验统计量之间的关系。这些斜率是线性关联矩阵H的函数,并且当卫星空间几何分布发生变化时,斜率值会发生变化。与每颗卫星线性关联的斜率为

图5 可见卫星的特征斜率
而S可根据P直接计算
S=PTP
当位置误差确定时,最难检测的是斜率最大的卫星,因为它具有最小的校验统计量。
图6所示的椭圆形“数据云团”描述了当斜率最大的卫星有了偏差时会发生的散布。这个偏差使处于检测阈值左侧的数据百分比等于漏检率。小于这个值的任何偏差会把“数据云团”向左移动,把漏检率提高到超出许可的界限。奇偶空间的这个临界偏差记为pbias,pbias是确定的,但取决于可见卫星数。

图6 在SLOPEmax卫星上有临界偏差的散布图
水平保护等级HPL由下式确定。
HPL=SLOPEmax×pbias
3 仿真验证
3.1 卫星定位水平保护距离估计仿真
本文提出了基于误差估计的轨道占用检测算法,利用MATLAB对该HPL算法进行仿真测试,确定此方案的可行性。
基于奇偶变换的定位误差估计算法有
HPL=SLOPEmax×pbias=
根据可见卫星数目的不同,λ是不等的。

( 6 )

( 7 )
本文假设漏检率为0.001,误检率为0.005,对于不同的可见卫星数,由式( 6 )、式( 7 )计算得到对应的λ值见表1。
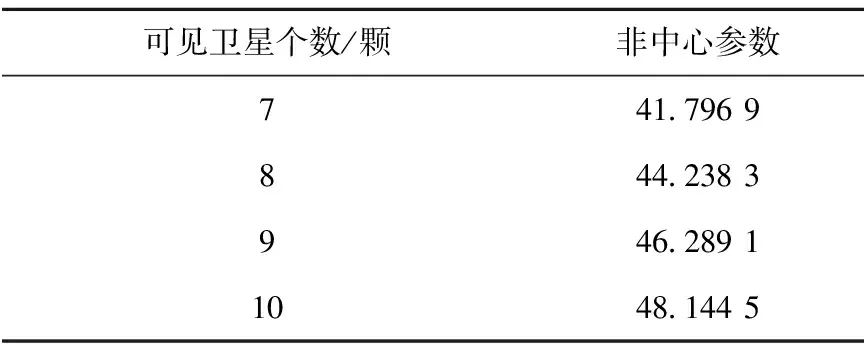
表1 不同可见卫星数对应的非中心参数值
σUERE经验值取为5。本文分为实际定点HPL计算、模拟动态点HPL计算、实际动态点HPL计算 3种情况仿真实验,HPL阈值取(Critical Value)560 m。
图7为实际定点HPL仿真示意图。此采样点将接收机设置在北京交通大学一教学楼顶,采样时间为1 700 s。

图7 基于Slope算法的实际定点水平保护距离HPL
图8为模拟动态点HPL仿真示意图。模拟动态线路为一直线,动态点以40 km/h的速度运行,模拟时间为1 600 s。
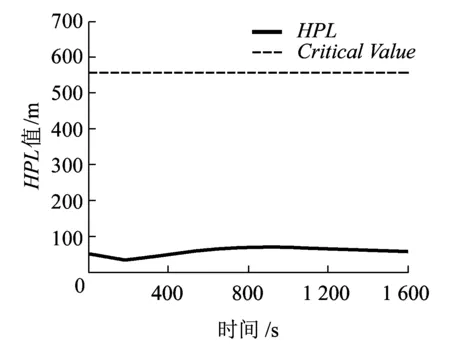
图8 基于Slope算法的模拟动态点水平保护距离HPL
图9为实际动态点HPL仿真示意图。实际动态数据在北京交通大学内采集,动态点以20 km/h的速度运行,采样时间为190 s。
通过仿真可以看出,实际定点环境下的HPL比较稳定,都维持在20 m左右;模拟动态点和实际动态点基于奇偶变换的定位误差估计算法在计算时,HPL数值浮动较大,但基本维持在100 m以内,对于长度在600~1 000 m左右的货运列车是可以接受的。因为动点的HPL和线路环境有关,可以提前制作既有线路的相应HPL值,在最不利的情况下即是取整个HPL的最大值,可以保证整个算法的安全性。
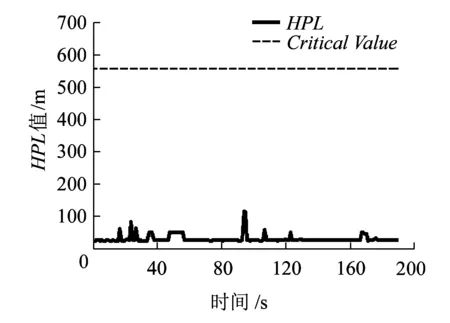
图9 基于Slope算法的实际动态点水平保护距离HPL
3.2 区间列车轨道占用仿真结果
通过对区间列车占用检测算法的分析,本节通过编程进一步完成区间列车轨道占用仿真。该仿真软件是利用MATLAB实现的,采用卫星定位模拟器仿真列车车头、车尾在一条假定区间线路上运行时产生的卫星星历数据和伪距数据,用以实时计算列车定位点的水平保护距离,从而确定列车轨道的占用情况,如图10所示。
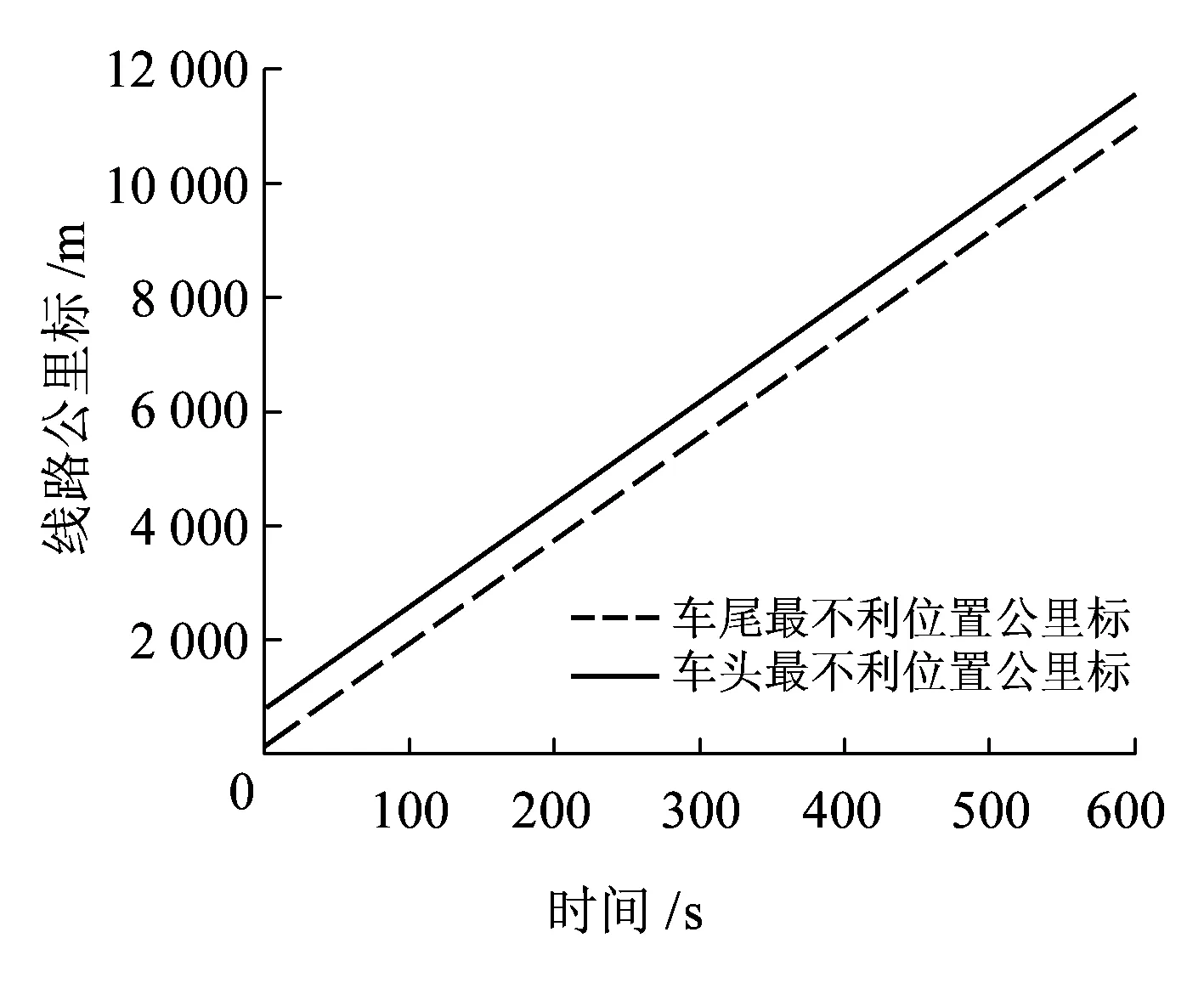
图10 区间轨道列车占用监测仿真图
图10模拟了车头、车尾以80 km/h的速度匀速运行时,列车轨道的占用情况。实线为不同时间最不利车头公里标位置曲线,虚线为不同时间最不利车尾公里标位置曲线, 同一时间点两条线之间的距离即为列车轨道占用区间。
4 结论
本文主要针对低密度线路列控系统的区间列车轨道占用监测,通过分析卫星定位解算过程,及不同置信区间、不同定位漏检率和误检率等因素,利用卫星定位水平保护距离,结合地图匹配技术,实现基于GNSS的区间列车轨道占用监测,并进行仿真测试。
参考文献:
[1]王长林.列车运行控制技术[M].北京:西南交通大学出版社,2007.
[2]Terry Tse.North American Joint Positive Train Control(NAJPTC) Project[EB/OL].U.S.Department Of Transportation Federal Railroad Administration,2009.
[3]FILIP A,MAIXNER V,MOCEK H,et al.Fault Diagnosis in High Integrity GNSS Base Train Position Locator[C]// Proceedings of 2nd European Space Agency Workshop on Satellite Navigation User Equipment Technologies,2004:1-8.
[4]JONAS M.Detection of GNSS Horizontal Position Error Using 3D Track Map[C]//2013 Joint Rail Conference,2013.
[5]刘江,蔡伯根,王剑.地图辅助北斗/惯导组合的列车轨道占用估计方法[J].铁道学报,2014,36(3):49-58.
LIU Jiang,CAI Bai-gen,WANG Jian.Map-aided BDS/INS Integration Based Track Occupancy Estimation Method for Railway Trains[J].Journal of the China Railway Society,2014,36(3):49-58.
[6]杨克须.基于多传感器的列车完整性检测技术研究[D].北京:北京交通大学,2014.
[7]唐一哲.基于GNSS的列车定位完善性研究[D].北京:北京交通大学,2007.
[8]张强,张晓林,常啸鸣.用于卫星导航多星故障识别的新方法[J].航空学报,2008,29(5):1239-1244.
ZHANG Qiang,ZHANG Xiao-lin,CHANG Xiao-ming.New Method for Satellite Navigation Identifying Simultaneous Multi-faulty Satellites[J].Acta Aeronautica et Astronautica Sinica,2008,29(5):1239-1244.
猜你喜欢
中学生数理化·八年级物理人教版(2022年9期)2022-10-24
铁道通信信号(2020年1期)2020-09-21
空间科学学报(2020年6期)2020-07-21
空间科学学报(2020年6期)2020-01-08
环球时报(2019-12-05)2019-12-05
中国外汇(2019年13期)2019-10-10
铁道通信信号(2018年10期)2018-12-06
北京信息科技大学学报(自然科学版)(2016年6期)2016-02-27
中国铁道科学(2015年6期)2015-06-21
太空探索(2014年4期)2014-07-19