静电悬浮加速度计地面高压悬浮原理与应用
2015-05-10 05:47:08陈光锋霍红庆王佐磊银东东雷军刚张小青席东学
中国空间科学技术 2015年5期
陈光锋 霍红庆 王佐磊 银东东 雷军刚 张小青 席东学
(兰州空间技术物理研究所真空技术与物理重点实验室,兰州730000)
静电悬浮加速度计地面高压悬浮原理与应用
陈光锋 霍红庆 王佐磊 银东东 雷军刚 张小青 席东学
(兰州空间技术物理研究所真空技术与物理重点实验室,兰州730000)
静电悬浮加速度计是进行空间飞行器准稳态非重力精密测量的设备。静电悬浮加速度计研制中,需要借助高压悬浮来完成其功能和部分性能评价的相关工作。文章就地面静电悬浮加速度计检验质量高压悬浮中涉及的相关问题进行了理论分析,给出了地面悬浮原理、高压电路实现形式、工作点选取、稳定性控制、高压静电力作用分析等,给出了实际试验结果,表明地面上系统在0.1 Hz附近具有10-8gn/Hz1/2左右的分辨率,并可在悬浮状态下,完成功能及相关性能测试,获得静电悬浮加速度计地面直接性能评价受限的主要因素,同时就存在的问题进行了讨论。
静电悬浮加速度计;地面试验;高压悬浮;控制;空间测量设备
1 引言
静电悬浮加速度计是空间飞行器准稳态非重力精密测量的设备,在空间飞行器非重力精密测量、空间大气密度及微尘埃测量、地球重力场测量、空间飞行器无阻力飞行测控系统、物理学基础理论验证等方面获得应用,其更广泛的应用也在进一步拓展中。在地面研制中,功能和性能的可测试评价问题是静电悬浮加速度计研制的关键问题之一,也是难点所在。美国研制的MESA静电加速度计进行了检验质量从圆筒型到立方体的改进,在航天飞机及相关卫星上进行了多种应用[1-2]。ONERA于1973年研制了检验质量为球型的CACTUS静电加速度计[3],用于大气阻力试验和无阻力飞行试验,由于其检验质量是圆形球体,在检验质量转动时存在耦合问题,20世纪90年代ONERA研制了ASTRE静电加速度计[4],搭载在航天飞机上,进行空间准稳态非重力的测量[5]。1995年,ONERA研制了残余加速度为1×10-9gn的高稳平台[6-7],用于更高精度系列加速度计STAR、SuperSTAR及GOCE任务的加速度计研制[8-10]。在这些静电加速度计的研制中,地面验证都面临着一系列困难,难度随精度的提高及结构尺寸的变化而增大。在地面验证试验中,除了落塔试验,地面的高压悬浮是静电悬浮加速度计进行功能和部分性能验证的基本方法之一。本文就地面静电悬浮加速度计功能及部分性能评价中涉及的检验质量高压悬浮及相关问题进行了理论分析,并据此设计了实际控制系统,给出了实际试验结果。
2 地面悬浮原理
2.1 基本原理
在静电加速度计的地面试验中,必须克服1gn重力加速度,以便将检验质量悬浮起来进行标度因数的测量和噪声性能的测量,完成静电悬浮加速度计部分功能和性能的测试。这一功能必须通过高压伺服控制电路来完成,其原理框图如图1所示。实际电路在垂直方向有相同的3路电路共同作用。
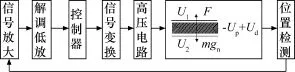
图1 地面试验悬浮控制电路框图Fig.1 Block digram of the ground test suspending circuit
图1中,Up是直流偏置电压;Ud是检测电压;U1是上极板电压,U2是下极板电压,均由控制电路给出。根据检验质量受力分析,可得检验质量的动力学方程

式中 F是静电力;A是垂直方向的面积;m是检验质量的质量;gn是重力加速度;x是检验质量的位移;k是残余气体阻尼系数;d0是检验质量位于中心位置时,与极板之间的距离;ε是真空介电常数。式(2)代入式(1),公式(1)将变为:

在控制系统的作用下,当检验质量位于中心位置且趋于静止时,式(3)将变为准静态平衡方程:

满足公式(4)的U1和U2的解,将是控制电路最终给出的结果。
2.2 悬浮电压范围确定
悬浮电压就是使检验质量稳定悬浮在相对极板中间时,需要施加在极板上的电压。根据公式(4),有

根据加速度计敏感结构实际尺寸,取d0=60μm, m=0.072 kg,gn=9.8 m/s2,A=(4×10-3m)× (256×10-3m),Up=10 V,ε=8.86×10-12F/m。根据公式(3)的函数关系,可以得图2所示的上下极板电压关系。
图2表示了检验质量在伺服系统控制作用下,位于平衡位置时,上下极板电压的变化情况。理论上在曲线上的任意点,检验质量都可在该点的上下极板电压作用下,处于极板中间位置的平衡状态。

图2 悬浮时上下极板高压曲线Fig.2 The high voltage curve of the up and down electrodes during suspension
3 电路实现
3.1 电路形式
利用合适的电路,产生上极板电压U1和下极板电压U2,这是高压电路实现的问题。图3是一种简化的高压电路实现形式。
Uh是高压,Q1、Q2是击穿电压高于1 500 V的高压三极管,是高压电路的主要器件,通过R1和R2进行高压管的限流,D1和D2对电路起保护作用,通过U1和U2输出所需要的工作电压,Vb1和Vb2是高压控制信号。
3.2 工作点选取和设置
工作点指检验质量在高压悬浮平衡时,上下极板各自的平均电压,选取主要由敏感结构决定,同时考虑电路负刚度不能过大。根据计算,高压Uh设定为1 000 V可满足要求。根据悬浮控制电路,得

图3 高压生成电路原理图Fig.3 The high voltage supply circuit

式中 Rc为限流电阻,即图3中的R1、R2;Rb为偏置电阻,即图3中的R3、R4;ic1、ic2分别为流经Q1、Q2限流电阻的电流;β1、β2为放大倍数。取U1=830 V,由图2得U2=305 V。因为Uh=1 000 V,Rc=510 kΩ,得ic1=0.3333 m A,ic2=1.362 7 m A。根据高压管的有关参数,对应于0.333 3 m A的放大倍数β1=28,对应于1.362 7 m A的放大倍数β2=32。因此,有

根据电路有

式中 u为控制器输出电压。得

反过来讲,取U0=-5.5 V,根据曲线,U1=830 V,U2=305 V,将是检验质量最终在控制系统作用下的趋向点。从另外一方面讲,通过U0可以配置上下极板的电压,在实际电路中取了U0= -5 V。悬浮后,理论上控制器给出的控制电压u基本是2.263 V左右。
3.3 控制信号变换
控制信号变换,就是将控制器输出的控制信号u变换为适合高压电路控制的信号Vb1和Vb2,利用运放通过加法电路实现。具体来说,就是将控制器给出的控制信号u通过相关电路,进行叠加设定工作点U0的线性变换,以产生U1和U2高压发生电路的控制信号Vb1和Vb2。
4 高压静电力的分析
在静电悬浮加速度计测试开始,系统上电,检验质量必须在控制系统的控制下,迅速提升并精确位于上下极板的中心位置。使检验质量在Y向和Z向与相应极板轴线精密对准,从而保证精确测量的目的。设计控制器的思想是,在要求的控制位置,将系统线性化,获得系统的数学模型,以此为依据,设计控制器。上极板与检验质量建立的电场强度为E1,下极板与检验质量建立的电场强度为E2,则作用于检验质量的电场力Fe可以表示为

x是偏离平衡位置的小项,U1和U2是平衡位置时,上极板和下极板的电压。式(11)经过忽略高阶项的化简,得

再利用式U1+U2和U1-U2的关系,有

式(14)可进一步表示为

式(15)将控制电压和高压悬浮控制联系起来了,可进一步表示为

根据上述给出的参数,可计算出ku、kx分别是4.33 m/(s2·V)和4.239 9×105s-2。kx也叫X方向位移负刚度。
5 控制稳定性分析
综合系统的传递函数[11],结合上述高压静电力的作用,经过控制器补偿,得出系统稳定性,如图4所示。
可见,高压悬浮控制系统是个条件稳定系统,要使系统稳定,必须要有足够的控制带宽。
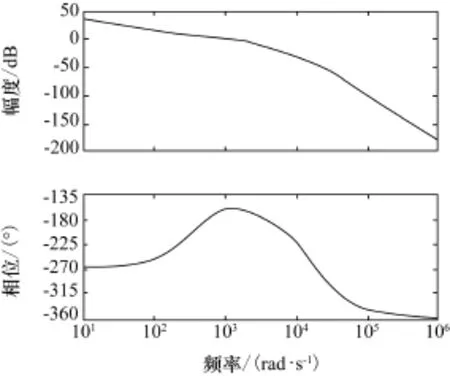
图4 悬浮控制系统的BODE图Fig.4 The BODE plot of suspension control system
6 实际控制效果与性能评价相关问题的讨论
6.1 悬浮控制实际数据
根据理论分析设计的高压伺服控制系统,进行了静电悬浮加速度计0.072 kg检验质量地面的悬浮试验。试验表明,系统能够在1 s内,将质量块稳定在敏感结构中心位置。在悬浮状态下,进行了标度因数测试等工作。在量程范围内,输入输出线性度可达99.99%,表明系统很好地将检验质量块维持在了敏感结构的中心位置。试验结果表明高压悬浮控制实现和理论预期是一致的。图5是悬浮后,X方向位置变化情况的部分数据,图6是控制电压变化情况的部分数据。

图5 X方向位置变化情况Fig.5 The position change in X direction
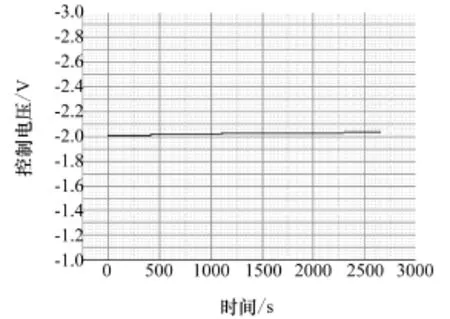
图6 X方向控制电压Fig.6 The control voltage of X direction
经过数据处理,获得位置电压数据标准偏差:σx=1.216 1×10-4V。
X方向的三路综合实际控制电压绝对值2.05 V左右,和理论值2.26 V是接近的。消除明显的线性漂移,获得控制数据标准偏差σv=4.662 2×10-4V。
6.2 噪声耦合分析
垂直位置加速度噪声为:kx×σx/K=2.995×10-5gn,其中K是系统的检测电路增益,值为1.756 71×105V/m;垂直控制加速度噪声:ku×σv=2.06×10-4gn。耦合到水平的噪声,按国外的解耦标准,敏感结构及内部检验质量各正交轴在装配后的误差角好于10-5rad[6],则可估算得位置耦合误差不大于2.995×10-9gn;控制耦合误差不大于2.060×10-9gn,则综合耦合误差不大于3.635×10-9gn。也就是性能地面直接测试,如果按国外结构加工装配精度优于10-5rad的解偶原则,则综合性能评价在1×10-9gn专用平台上水平方向噪声贡献接近10-9gn。因此,敏感结构的加工装配精度直接影响加速度计的最终性能及评价水平,也和加速度计的最终性能及平台噪声特性相关。
上述分析表明,高压电路的耦合噪声和国外的水平相当。如果敏感结构的加工装配精度为10-4rad,则耦合噪声约为3.635×10-8gn。可见,结构加工装配不理想,直接导致耦合到水平方向的噪声增大。
6.3 平台隔震性能影响
由于静电悬浮加速度计地面测试中,是安装在隔震平台上进行相关功能和性能测试的,平台的残余加速度性能是影响静电悬浮加速度计性能评价的重要方面,国外在相关的平台建设上也是进行了大量的研究。图7是ONERA的平台噪声特性[6]。其中的曲线G表示一般大理石材料的平台上环境加速度情况,曲线P表示具有低频扰动隔离能力的专用平台的残余加速度情况。可见,扰动可控的专用测试平台,能将低频的环境噪声抑制在约1×10-9gn的水平上,而大理石平台为1×10-7gn。一般的不可控的平台噪声,随环境等的变化而变化,介于大理石平台和可控隔震平台之间。静电悬浮加速度计研制的前期地面悬浮测试中,水平方向在测量频带0.1 Hz处获得了约10-8gn/Hz1/2的测试结果(见图8),与不可控平台的残余加速度、结构耦合噪声结果基本吻合,当然也包含系统本身的噪声,而系统本身的噪声才是需要关心的部分。

图7 ONERA测试平台噪声特性Fig.7 The ONERA test plateform noise performance

图8 加速度计地面水平方向实测谱密度Fig.8 The horizontal direction spectral density on ground test
6.4 水平测量电路性能评价建议
高压悬浮电路在静电悬浮加速度计的研制中的作用主要表现在地面进行静电悬浮加速度计的悬浮控制功能及水平部分性能验证。鉴于通过高压悬浮在地面直接对静电悬浮加速度计进行性能评价时,由于结构加工及装配过程中存在不理想的情况,在地面1gn环境下,将存在比较严重的交叉耦合问题。加上地面环境中,非可控平台对低频噪声抑制得不理想,使得静电悬浮加速度计水平性能评价受到一定的制约。如高于1×10-9gn的地面性能评价,用高压悬浮后直接测量评价基本不可能。这种情况下,可通过悬吊的方式,进行水平电路的性能评价及改进[12-13]。相对来讲,在垂直于悬吊的水平方向,只有不大于平台的残余振动,再没有其他的干扰对质量块产生影响,因此可以排除交叉耦合的影响,使水平方向更能客观反映电路的检测控制能力,这一点,国外更高精度的静电加速度计也是采用这样的方法[12]。另外,也可以采用半物理仿真的方法,单独对电路进行研究,这也是一种改进电路性能的途径。
7 结束语
8静电悬浮加速度计研制中,要在专用隔震平台上,通过地面高压悬浮控制系统,将检验质量块稳定悬浮后,进行静电悬浮加速度计水平方向功能和部分性能测试及评价。地面限制静电加速度计性能直接评价极限的主要原因是,敏感结构不理想导致的耦合及不可控平台的残余加速度。根据敏感结构的加工及装配精度,在目前的测试平台残余加速度的水平上,本悬浮电路在非主动控制隔震测试平台上,可满足地面对静电悬浮加速度计量程、标度因数及线性度等测量,以及约10-8gn的分辨率实际验证和性能评价。在电路噪声一定的情况下,标度因数也能导致地面评价指标有小的变化,如标度因数减小,将导致分辨率更高。在此基础上,更高性能的评价则可通过悬吊质量块等方式解决,将大部分地面震动,主要是结构耦合噪声,排除在测试系统之外,从而能更好地反映系统的性能。由于静电悬浮加速度计的量程很小,其还涉及偏值测量等问题[14-15],是地面悬浮测量无法完成的,只能通过落塔试验粗略估计或在轨确定。此外,高压悬浮控制电路也可应用在地面环境中对震动等需要高灵敏检测的相关领域。
[1] LANGE W G.Development,test,and calibration of a three-axis accelerometer system[R].ASTIA Document Reports:ADA056711,1978.
[2] LANGE W G,DIETRICH R W.The MESA accelerometer for space application[R].Washington: NASA Conference Publication,1990.
[3] BOUDON Y,BARLIER F,BERBARD A,et al.Synthesis of flight results of the CACTUS accelerometer for accelerations below 10-9g[J].Acta Astronautica,1979,6(11):1378-1398.
[4] NATI M,BERNARD A,FOULON B,et al.ASTRE,a highly performant accelerometer for the low frequency range of the microgravity environment[C].The 24thSymposium on Space Environmental Control Systems,Friedrichshafen Germany,1994.
[5] TOUBOUL P,FOULON B,LE CLERC G M.The accelerometer ASTRE for the microgravity environment monitoring on board space laboratories[R].Paris:ONERA,1996:3825.
[6] PIERRE T,BERNARD F.Space accelerometer developments and drop tower experiments[J].Space Forum, 1998(4):145-165.
[7] FRANCOISE LIORZOU,RATANA CHHUN,BERNARD FOULON.Ground based tests of ultra sensitive accelerometers for space mission[C].The 60thInternational Astronautic Congress,Daejeon,Korea,2009.
[8] PIERRE T,BERNARD F,LE CLERC G M.STAR,the acceleromter of geodesic mission champ[C]. The 49thInternational Astronautic Congress,Melbourne,Australia,1998.
[9] TOUBOUL P,WILLEMENOT E,FOULON B,et al.Accelerometers for CHAMP,GRACE and GOCE space missions:Synergy and evolution[J].Bollettino Geofisica Teorica Applicata,1999,40:321-327.
[10] MARQUE J P,ONERA GOCE TEAM.Six ultra sensitive accelerometers for the GOCE mission[C]. 59thIAC Conference,Glasgow,England,2007.
[11] 陈光锋,唐富荣,薛大同.静电悬浮加速度计控制器设计分析[J].航天控制,2005,23(4):79-82.
CHEN GUANGFENG,TANG FURONG,XUE DATONG.The controller design analysis for electrostatic suspened accelerometer[J].Aerospace Control,2005,23(4):79-82.
[12] HUELLER M,CAVALLERI A,DOLESI R,et al.Torsion pendulum facility for ground testing of gravitational sensors for LISA[J].Classical and Quantum Gravity,2002,19:1757-1765.
[13] MANCE DAVOR.Development of electronic system for sensing and actuation of test mass of the inertial sensor LISA[D].Split:University of Split,2012.
[14] ROMANS L.A note on GRACE cg offset determination with magnetic torquers[R].California:Jet Propulsion Labarotory,1997.
[15] WANG FURUN.GRACE cg offset determination by magnetic torquers during the in-flight phase[R]. Austin:The University of Texas,2000.
Ground High Voltage Suspension Theory and Applications for Electrostatic Accelerometer
CHEN Guangfeng HUO Hongqing WANG Zuolei YIN Dongdong LEI Jungang ZHANG Xiaoqing XI Dongxue
(Science and Technology on Vacuum Technology and Physics Laboratory, Lanzhou Institute of Space Technology and Physics,Lanzhou 730000)
The electrostatic suspension accelerometer is a quasi steady and non gravity precision measurement equipment for spacecraft.In the development of electrostatic suspension accelerometer, the evaluation of the functions and the performances of the accelerometer need to be accomplished by the high voltage suspension.On the ground tests,the theoretical analysis of the electrostatic suspension accelerometer related issues involved in the high voltage suspension was carried out.The ground suspension principle,a high-voltage circuit,chooses the working point,control stability,and the high voltage static electricity effect analysis etc.were given.The system resolution near the 0.1 Hz is about 10-8g/Hz1/2on ground test,and can finish the function and related performance tests in the suspension state.The main factors of the direct performance evaluation of the electrostatic suspended accelerometer on ground were obtained,and the related problems were discussed.
Electrostatic accelerometer;Ground test;High voltage suspension;Control; Space measurement device
10.3780/j.issn.1000-758X.2015.05.008
(编辑:高珍)
2015-05-08。收修改稿日期:2015-06-12
陈光锋 1966生,2006年获中国空间技术研究院物理电子学专业博士学位,高级工程师。研究方向为空间微重力测量技术和静电悬浮加速度计。
猜你喜欢
小哥白尼(趣味科学)(2022年2期)2022-05-25 13:20:58
中国特种设备安全(2021年5期)2021-11-06 05:09:08
石油管材与仪器(2020年5期)2020-11-05 02:36:06
中国惯性技术学报(2017年1期)2017-06-09 08:15:14
科学大众·小诺贝尔(2016年11期)2017-01-10 21:02:35
中学生数理化·高二版(2016年10期)2016-12-24 11:26:42
创新作文(小学版)(2016年16期)2016-11-11 05:47:47
光学精密工程(2016年5期)2016-11-07 09:06:41
锻压装备与制造技术(2016年3期)2016-06-05 09:36:12
电源技术(2015年9期)2015-06-05 09:36:06