三体船模回转运动模式试验分析
2015-05-09 00:50韩俊,吴尧,崔健
造船技术 2015年5期
韩 俊, 吴 尧, 崔 健
(1.上海外高桥造船有限公司, 上海 200137; 2.江南造船(集团)有限责任公司, 上海 201913;3. 上海船舶运输科学研究所, 上海 200135)
三体船模回转运动模式试验分析
韩 俊1, 吴 尧2, 崔 健3
(1.上海外高桥造船有限公司, 上海 200137; 2.江南造船(集团)有限责任公司, 上海 201913;3. 上海船舶运输科学研究所, 上海 200135)
本文进行了三体船的自主操纵性回转试验研究。选用遗传算法作为优化方法,借助VB语言编写了系统辨识程序对三体船的回转性试验数据进行辨识,并将辨识结果与试验数据进行对比和误差分析,从一系列对比数据图表中得出辨识结果同试验结果吻合较好。
三体船 系统辨识 数学模型 操纵性回转试验
1 引言
三体船作为一种新型高性能船舶日益受到人们的关注,许多国家进行了大量的试验和理论研究,并已经有若干实船投入使用。如澳大利亚建造的三体旅游船“Cat No.1”号,该船在7级风、浪高2.5 m的海浪下能消除船艏砰击,同时减少纵摇运动。2010年1月16日美国海军为“独立号”三体濒海战斗舰举行服役仪式,该舰全速航行时航速最快达到46 kn。这些信息传递了对于三体船的研究,国外已处于领先地位。相比而言国内学术报道中多见的是对于三体船理论研究,尤其是关于三体船水动力学分析已经较为广泛地开展[1]。
意大利船舶研究中心基于SIMUP模拟程序计算分析三体船的两侧体不同布局对其操纵性能的影响[2]。卢晓平[3]等人采用Matlab软件,对三体船操纵性试验过程中的回转运动轨迹、航速变化曲线以及艏向角随舵角变化曲线等操纵特性进行了仿真模拟。通过和单体船的对比分析,计算结果显示较常规单体船而言三体船的定常回转特性有所下降,但航向稳定性有所提高。然而,有关三体船实船或船模操纵性试验研究鲜见报道,本文对自航三体船模进行了改变侧体纵向位置和舵角等操纵性试验。
2 系统辨识与遗传算法
系统辨识常用于确定数学模型和参数估计,在电力系统、生物医学系统、航空航天飞行器系统、生态系统等诸多领域已广泛应用。数据、模型类和准则构成了系统辨识的关键三要素。遗传算法是进化算法中的一种,主要用于解决最优化和搜索问题。本文将遗传算法与系统辨识进行有效结合,合理有效地对实验数据进行计算分析,如图1所示。
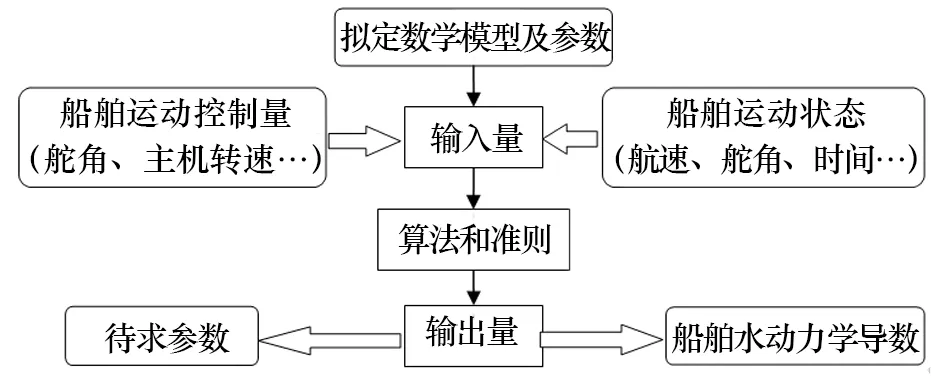
图1 实验数据分析流程
3 三体船操纵性数学模型
为了描述三体船的运动,采用如下两个右手坐标系:一个是固定坐标系O0X0Y0,另外一个是运动坐标系G0X0Y0。图2为三体船坐标系。
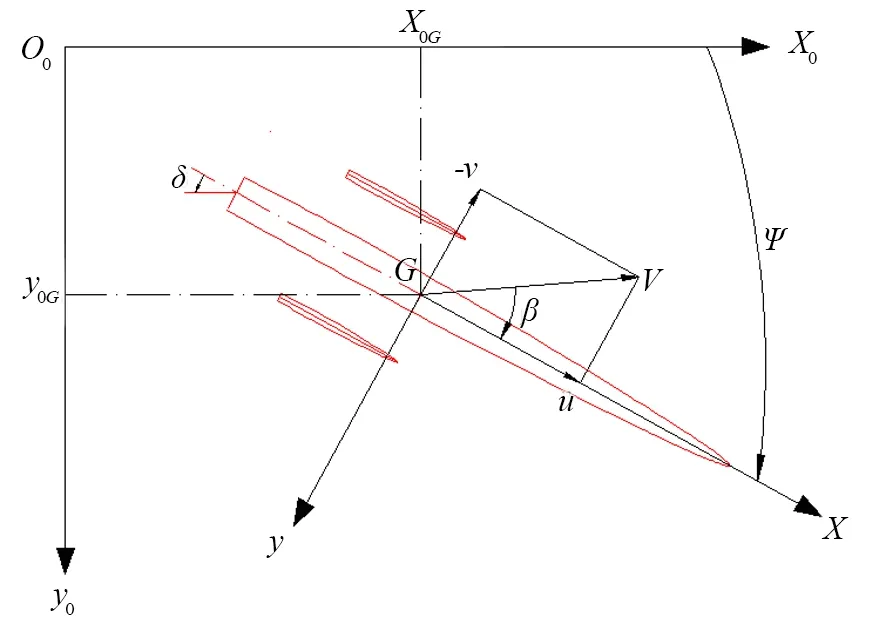
图2 三体船坐标系
其中:Ψ为艏向角,规定自O0X0轴至GX轴,顺时针方向为正;V为速度矢量,其在GX轴和GY轴上的投影分别为u和v;β为漂角,规定速度矢量V至GX轴,顺时针为正;δ为舵角,规定操右舵为正。
在线性化假设下,同时考虑等运动参数是小量,略去二阶以上的高阶小量参数,三体船回转阶段的运动可用以下方程组表示:
对于水面船舶的操纵运动,首向角Ψ和角速度r随时间关系的规律非常重要。因此将式(1)中第二、三式中的v消去,得到关于r的运动方程:
式(2)称为二阶线性KT方程[4],该方程描述了船舶运动对操纵的响应,也称为操纵响应方程。
由于操舵速度是有限的且船舶本身的惯性较大,对舵的响应基本上是一种缓慢的运动,因此式(2)可以近似写成:

故选择
为目标函数,其中α、δr、K为待辨识的参数,N为记录的次数。
4 操纵性试验分析
船舶操纵性通常包括航向稳定性、回转性、转艏性和跟从性以及停船性能。本文主要基于自由自航模试验方法开展不同侧体布局下无人三体船模的回转试验。
4.1 回转试验方法
回转试验进行了包括改变侧体纵距a(见图3)、主机转速和舵角的多种状态的组合测试。
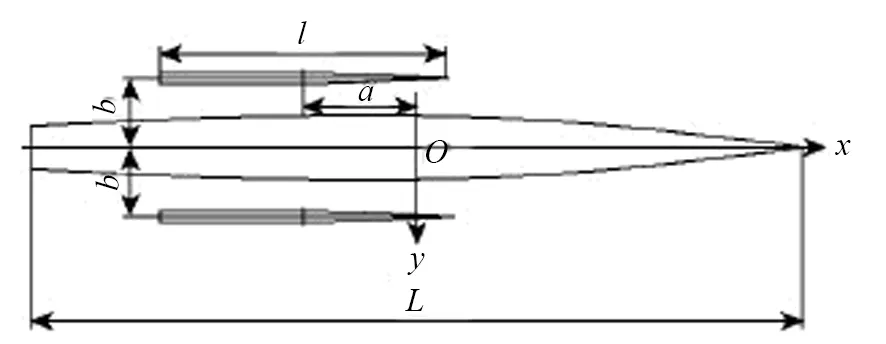
图3 三体船布局与相关尺度
试验步骤:
(1) 试验前准备,将蓄电池充满电确保动力,调整侧体横向间距和纵向间距;
(2) 试验前船模称重、各连接线路检查,调试遥控器,确保各项功能没有问题之后,下水;
(3) 正确配载以满足船模吃水要求;
(4) 试验前和试验后需记录试验水温等相关环境状况;
(5) 先让船模试跑一个来回,一方面暖机,另一方面破水;
(6) 舵角初始位置为0°,使船模在预定的航向上保持直航达到稳定的预定速度;
(7) 操纵船模行使到靠近游泳池岸边处时,在不同的控制电压下操纵同一舵角使其开始做回转运动;
(8) 当船模进入定常回转状态时(船模艏向角变化180°以上),测量记录船模的回转时间和回转直径;
(9) 等水,待水池无明显余波进入下一个状态试验。
4.2 试验分析
船模主尺度如表1所示,试验数据如表2所示。
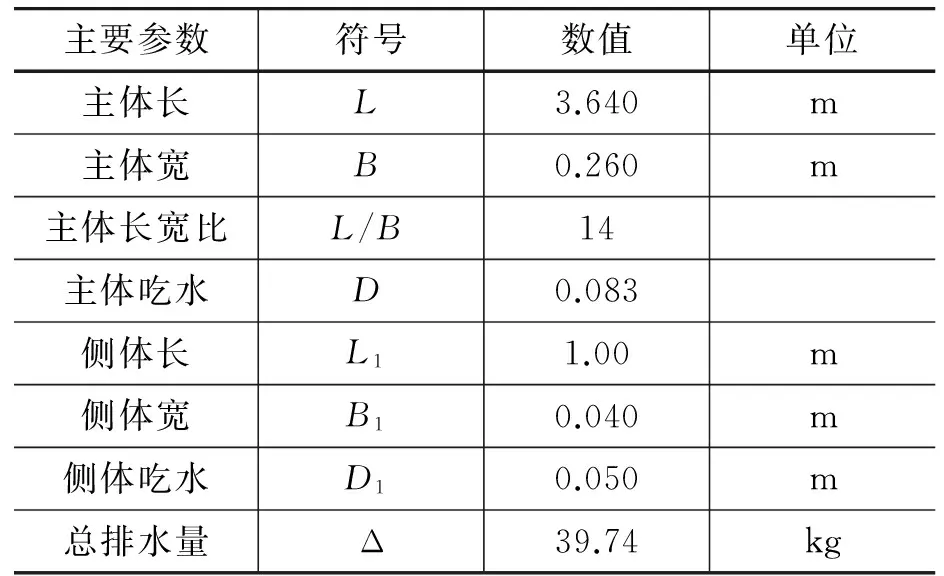
表1 三体船模型主尺度
当a=946mm时得到一组解:
α=-0.00317,K=-0.01807,δr=7.386,相应的回转数学模型写成:
r-0.00317r3=-0.01807(δ-7.3863)。
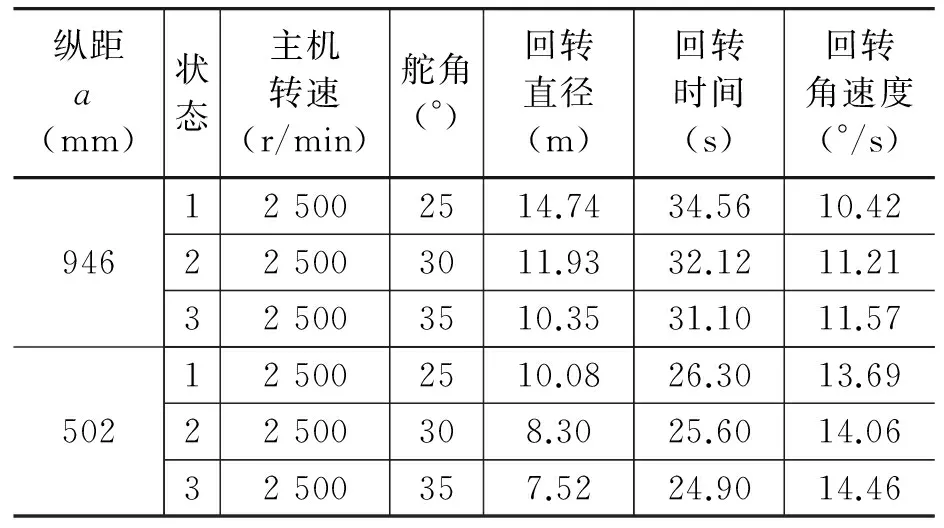
表2 操纵性回转试验数据(横向间距b=256 m)
当a=502mm时得到一组解:
α=-0.00099,K=0.03172,δr=-6.886,相应的回转数学模型写成:
r-0.00099r3=0.03172[δ-(-6.883)]。
经过笔者分析计算,得到设计变量上下限:α∈[-0.01,0.01],K∈[-0.1,0.1],δr∈[-8,8]。为了验证α、δr、K试验值的准确性,笔者选取了以下两种方法进行验证。
选择辨识试验数据,取种群50个,遗传代数300代进行系统辨识。针对a=502mm辨识结果为α=-0.001063,K=0.03211,δr=-6.810,得到回转辨识数学模型:
r-0.001063r3=0.03211[δ-(-6.10)3]。
系统辨识结果的验证:
利用回转角速度代入式
r-0.001063r3=0.0321[δ-(-6.810)3]得到新的一组回转舵角,与试验数据进行对比可以看出辨识结果与试验结果基本吻合。图4为辨识结果与试验结果比较。
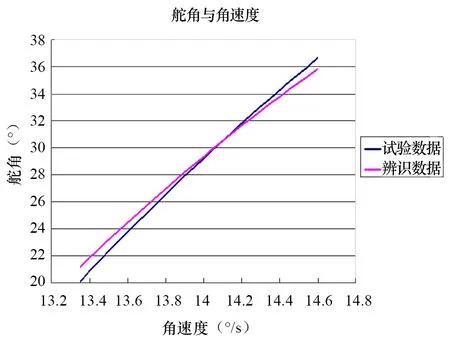
图4 辨识结果与试验结果比较
5 结语
在三体自航船模操纵性回转试验实施中,笔者设计并完成了改变侧体位置的回转试验,采集了相关试验数据。通过回转试验验证了三体船侧体的位置对其回转性能有着直接的影响,当侧体横距的缩短和纵距的增加时均有利于三体船的回转性能。回转试验采用r+ar3=K(δ-δr)作为辨识数学模型,利用试验数据解得:α=-0.001063,K=0.03211,δr=-6.810。辨识结果分析与试验数据吻合较好,得到了可靠而有效的结论。
[1] 赵连恩,谢永和. 高性能船舶原理与设计[M]. 北京:国防科技出版社,2009.
[2] Luca S,Roberta D,Michele V. Design Project of a Trimaran Multipurpose Frigate-study of the Hydrodynamic Aspects[C]. Pros. of the 7th International Conference on Fast Sea Transportation FAST 2003,Naples Italy,2003.
[3] 卢晓平,姚迪,王中. 三体船操纵特性计算机数值仿真[J]. 中国舰船研究,2010,5(3):1-7.
[4] 盛振邦,刘应中. 船舶原理(下册)[M]. 上海:上海交通大学出版社,2008.
[5] Jia J B. Model experiments of a trimaran with transom stern[C]. International shipbuilding progress,2009.
[6] Peng Y,Liu M,Huang Q J. Modeling and control of Unmanned Trimaran Vehicles[C]. 6th China-Japan International Conference on Mechatronics,2010,43:541-545.
[7] Fang M C,Chang Z H,Yang S A. The effect of the side hull arrangement on the maneuvering characteristics of the trimaran ship[C]. 20th International Offshore and Polar Engineering Conference,2010,4:831-834.
Experimental Analysis on Rotation Motion Pattern of Trimaran Model
HAN Jun1, WU Yao2, CUI Jian3
(1.Shanghai Waigaoqiao Shipbuilding Co., Ltd., Shanghai 200137, China;2.Jiangnan Shipyard (Group) Co., Ltd., Shanghai 201913, China;3.Shanghai Ship and Shipping Research Institute, Shanghai 200135, China)
This article studied on the rotation motion of trimaran model and selected the Genetic algorithm as the optimization method first, then identified the test data of rotation motion by the program assisted with Visual Basic programming language. Having compared the identified results with the test data and analyzed the error, we got the identified result matched the test result well from a set of compared data plots.
Trimaran Identification system Mathematical model Rotation test
韩 俊(1986-),男,助理工程师。
U661
A
猜你喜欢
江苏船舶(2021年4期)2021-09-28
舰船科学技术(2021年8期)2021-09-18
舰船电子工程(2020年4期)2020-06-19
舰船科学技术(2016年1期)2016-02-27
舰船科学技术(2016年1期)2016-02-27
舰船科学技术(2015年9期)2015-12-23
中国水运(2015年2期)2015-04-23
小学生时代·大嘴英语(2014年6期)2014-11-04
中国产前诊断杂志(电子版)(2013年1期)2013-01-21
中国舰船研究(2012年1期)2012-11-09