
徕卡Viva GNSS在金塘大桥防撞试验中的应用
2015-05-08 07:27李科伟曹金宝李晓舟薛慧艳
测绘通报 2015年7期
李科伟,曹金宝,李晓舟,薛慧艳
(1.上海中振测量技术工程有限公司,上海 200235; 2.中交上海三航科学研究院有限公司,上海 200032; 3.青岛市勘察测绘研究院,山东 青岛 266000)
徕卡测量新技术应用专栏
徕卡Viva GNSS在金塘大桥防撞试验中的应用
李科伟1,曹金宝2,李晓舟2,薛慧艳3
(1.上海中振测量技术工程有限公司,上海 200235; 2.中交上海三航科学研究院有限公司,上海 200032; 3.青岛市勘察测绘研究院,山东 青岛 266000)
一、项目概况
浙江舟山大陆连岛工程金塘大桥全长26.54 km,其中跨海桥长18.27 km。防撞设施拟采用高架走锚消能式拦阻船舶系统。重力锚走锚时的阻力与其重力成一定关系,走锚距离越远,其消耗的动能越多,因此可根据设防船舶吨位、船速、流速、风速等具体参数,合理确定防撞系统重力锚的大小和走锚距离。
为了验证和优化结构设计,拟在西航道两侧非通航孔桥建设试验段并开展走锚消能测试与实船拦阻试验。该试验采用徕卡Viva GNSS实时提供船舶的导航、坐标轨迹、速度等信息;另外,配有拉力传感器、加速度传感器、倾角仪、流速仪、重力锚、拖船等设备。
二、测量设备
走锚消能测试与实船拦阻试验需要获取牵引索和锚链张力、船舶运动轨迹、船舶运动速度、水流方向和流速、风速、走锚距离等参数,从而得到船舶撞击速度与所需拦阻距离等的近似关系,并获得各种参数来校核数值计算方法,优化拦阻设施设计。
本文主要介绍徕卡Viva GNSS的应用,只列举了RTK测量所需的主要设备,见表1。
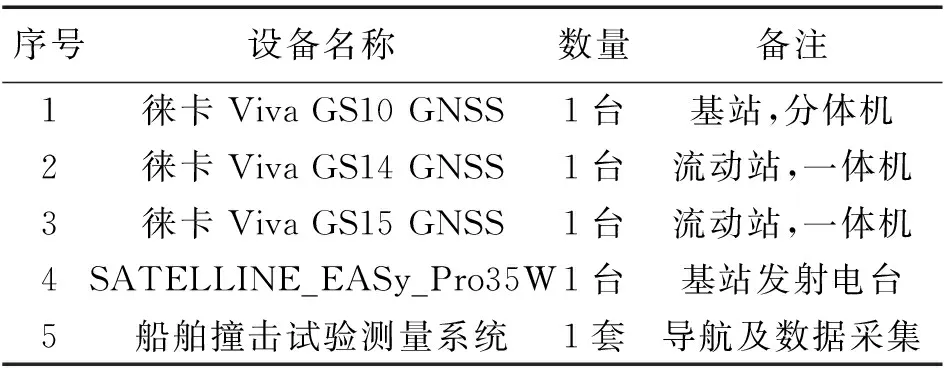
表1 所需主要设备
三、测量过程和方法
1.系统组成
测试地点如图1所示,在金塘大桥西南侧、海天路东侧1 km左右的岸边,架设一台徕卡Viva GS10 GNSS作为基准站。使用徕卡SATELLINE 35W大电台发射基准站差分数据,Viva GS14 GNSS和Viva GS15 GNSS两台流动站分别安装在拖船的船头和船尾,同时接收基准站差分数据。然后将两台GNSS流动站NMEA标准数据的时间、位置、速度、卫星状态等信息通过RS232串口协议传送到电脑上,使用船舶撞击试验测量系统软件进行分析处理,并实时显示船位的WGS-84经纬度、地方工程施工坐标、拖船航向、船速、航行距离等信息。测试区域分主航道和西航道两个测试区域,前者距基准站最远15.6 km,RTK依然持续保持固定解,后者距基准站最近是5.6 km,如图2所示。

图1 测试区域
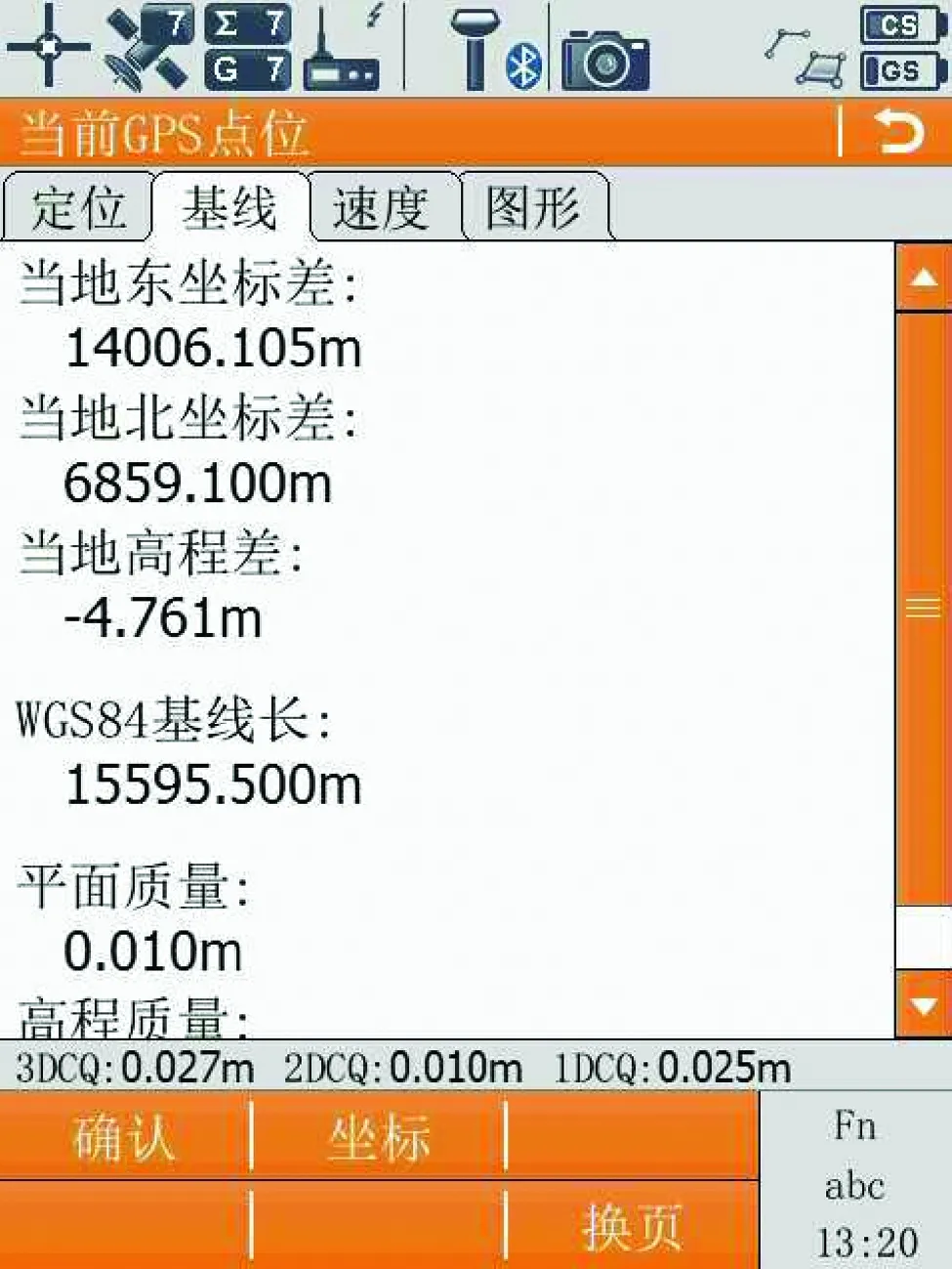
图2 Viva远距离固定时基线状态
2.拖锚消能测试

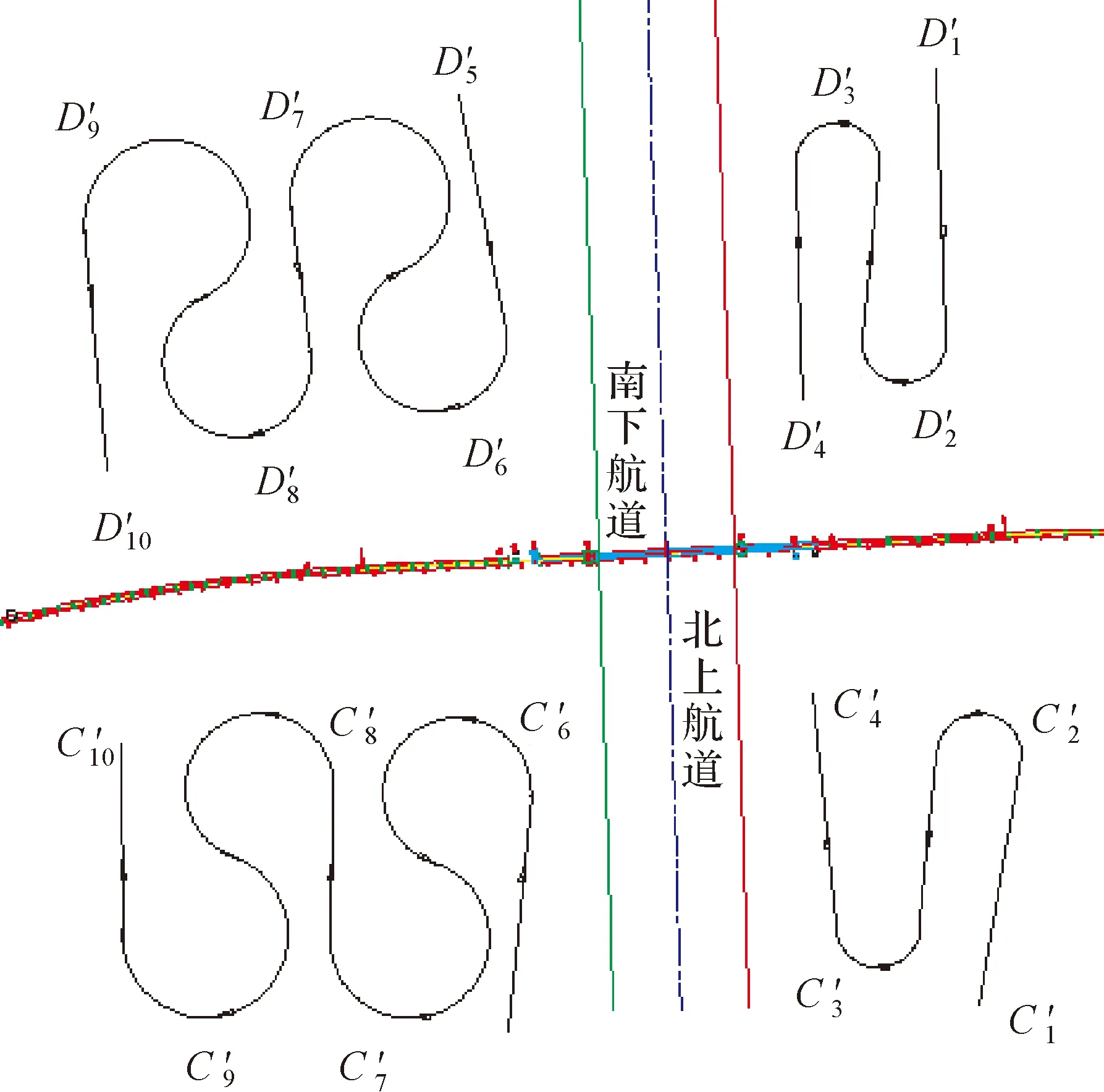
图3 主航道两侧的阻力测试拖轮运动轨迹
3.实船撞击测试
实船撞击试验时各船位布置如图4所示。试验撞击船顺水纵向撞击阻拦网后,试验船停车带动阻拦系统向前行进。同时,测试工作船根据试验船行进速度适当跟进,防止传感器信号线拉断。待试验船不再向桥位运动时,由保护拖轮逆流将试验船拖离。试验时,按照预先设计的路线,分别采用低速空载、高速空载、高速满载、低速满载等工况进行实船撞击测试。
4.成果示例数据
在拖锚消能测试和实船撞击测试过程中,测量小组在使用徕卡Viva GNSS导航时,由船舶撞击试验测量系统软件全程实时监测显示, 每秒钟获取一次拖船的绝对运动轨迹和速度值, 待一个工况结束后,将采集的数据自动批量输出,并自动将轨迹、时间和速度绘制在CAD图形中,图5为其中5 s的数据成果。

图4 实船撞击试验船位布置示意图

图5 轨迹、时间和速度输出至AtuoCAD中的示意图
四、结束语
本次防撞试验过程中,徕卡Viva GNSS接收机和SATELLINE 35W表现十分出色,在15余千米的测试区域,依然能得到RTK固定解,三维CQ精度在2~3 cm。金塘大桥非通航孔柔性防撞设施设计数据采集及防撞试验段实船撞击试验的圆满成功,为后续防撞设施的全面建设提供了数据资料。
(本专栏由徕卡测量系统和本刊编辑部共同主办)
猜你喜欢
珠江水运(2020年21期)2020-12-01
珠江水运(2020年16期)2020-09-16
船海工程(2019年6期)2019-12-25
小哥白尼(趣味科学)(2018年12期)2018-12-18
汽车工程师(2018年1期)2018-07-13
中国航海(2017年3期)2017-11-03
珠江水运(2017年17期)2017-10-10
中国公路(2017年13期)2017-02-06
民用飞机设计与研究(2015年3期)2015-12-07
中国船检(2011年10期)2011-08-04
