面向对象的资源三号卫星影像分类研究
2015-05-08 07:11:11薛梦姣段淼然陈瑞芳
测绘通报 2015年7期
薛梦姣,陈 刚,张 笑,于 靖,段淼然,陈瑞芳
(1.江苏省地理信息技术重点实验室,江苏 南京 210023; 2.南京大学地理信息科学系,江苏 南京 210023)
面向对象的资源三号卫星影像分类研究
薛梦姣1,2,陈 刚1,2,张 笑1,2,于 靖1,2,段淼然1,2,陈瑞芳1,2
(1.江苏省地理信息技术重点实验室,江苏 南京 210023; 2.南京大学地理信息科学系,江苏 南京 210023)
资源三号卫星影像数据目前广泛用于地形测绘、资源监测、地理国情监测等领域。本文主要针对资源三号卫星影像数据,以南京市玄武区为例,研究了适合国产高分辨率卫星影像的分类技术方法。分别采用面向对象的KNN分类方法和SVM分类方法对影像进行分类,并对分类结果的精度进行了分析和评价。研究结果表明,在对遥感影像采用合适的分割尺度进行分割后,采用基于面向对象的SVM分类方法得到的结果,其总体分类精度为90.72%,Kappa系数为86.64%,远高于采用基于面向对象的KNN分类方法得到的结果。因此,面向对象的SVM分类方法更适合于资源三号卫星影像的分类。
资源三号; 面向对象; 分类; SVM; KNN
一、引 言
资源三号卫星作为国内首颗民用高分辨率光学传输型测绘卫星,主要面向测绘1∶50 000地形图及开展1∶25 000等更大比例尺地形图的修测与更新工作。影像数据采用了立体观测与资源调查两种观测模式成像,具有定位精度佳、空间分辨率高与影像信息丰富等特点,为我国目前开展的地理国情监测工程提供了坚实的数据保障,也为探索利用国产高分辨率遥感卫星资料开展遥感应用研究提供了良好的工作基础[1-2]。
通过对遥感影像分类而快速获取地表信息,是遥感影像应用的关键步骤。资源三号卫星影像作为高分辨率遥感影像,利用传统的面向像素的遥感影像分类方法,易造成分类精度降低、空间数据冗余及资源浪费等问题[3]。M Baatz等根据高分辨率遥感影像的特点,于2000年提出了一种面向对象的分类方法,该方法根据影像的大小、形状、纹理及地物光谱特质等信息,将影像分割为同质的对象,并以此为基础进行影像分类[4]。随后,众多国内外学者对面向对象的方法进行了研究。S W Myint等采用面向对象方法,对美国亚利桑那州凤凰城中心城区的QuickBird影像进行了分类,其城市地物分类的总体精度达到90.40%,远高于仅依靠光谱信息的传统方法[5]。苏伟等结合QuickBird遥感影像和激光扫描LiDAR数据,采用多尺度、多变量的影像分割的面向对象分类技术,对马来西亚吉隆坡城市中心区的土地覆盖进行了分类研究,分类总精度达88.52%[6]。林先成等针对成都地区的QuickBird影像,采用不同的分割尺度对试验区的影像进行分割,比较了分割结果的优劣,确定了最佳分割尺度[7]。
本文以南京市玄武区的资源三号卫星影像数据为例,对影像分类过程中的技术方法展开研究,并对分类结果进行评价,从而找到一种适合于资源三号卫星影像分类的方法。
二、研究区域概况及数据源
本文研究区域位于南京市玄武区。玄武区是南京市的中心城区之一,区域面积80.97 km2,范围为北纬32°0′0.89″—32°0′31.16″,东经118°4′18.15″—118°6′39.38″。该区内有著名的钟山风景区和玄武湖风景区,植被覆盖率较高,植被、水体、建筑物等都有明显分布。
根据对玄武区遥感影像的分析及实地考察,本文将玄武区的土地利用类别划分为5大类,分别是植被、水体、道路、建筑用地和裸地。
本文采用的试验数据为资源三号测绘卫星的正视全色影像和多光谱影像,数据采集于2013年11月29日。正视全色影像光谱范围为0.50~0.80 μm,地面分辨率为2.1 m。多光谱影像有4个波段,分别为蓝(0.45~0.52 μm)、绿(0.52~0.59 μm)、红(0.63~0.69 μm)和近红外(0.77~0.89 μm)波段,地面分辨率为5.8 m。影像数据为传感器校正产品,即影像已经过辐射校正和传感器校正处理。
三、研究方法
1.影像预处理
(1) 几何精纠正
基于南京市的正射影像数据对全色和多光谱影像分别进行几何纠正。一共选取了15个控制点,控制点主要位于道路的交叉点和水系的转折点,且均匀分布于待纠正影像上。控制点的均方根误差为1.20。本文采取二次多项式对影像进行几何纠正,利用双线性内插法进行影像的重采样。对于纠正后的影像,本文选取了10个检查点进行精度评价。检查点的均方根误差为1.12,基本满足试验要求。
(2) 影像融合
对纠正后的全色和多光谱影像进行融合。目前有多种融合方法,如Gram-Schmidt、主成分变换、小波变换、Brovey变换等,本文选择Gram-Schmidt方法进行影像融合。该方法具有较高的图像保真效果,且计算简单,运算速度较快。重采样方式为双线性内插。
(3) 影像裁剪
利用南京市玄武区的行政区划矢量边界数据对影像进行裁剪。裁剪后的玄武区影像如图1所示。

图1 南京市玄武区真彩色合成影像图
2.影像分割
本文采用ENVIFX模块进行影像分割。该模块根据邻近的像素的纹理、颜色、亮度等对影像进行分割。不同的分割尺度会产生不同的效果。当选择的分割尺度较大时,生成的同质对象面积较大,且数量较少,但是易导致不同的地物类型错分为同一个同质对象;当选择的分割尺度较小时,生成的同质对象面积较小,且与实际地物更接近,但数量较多。因此,分割尺度的选择十分关键,将影响影像分类的精度。此外,在完成分割后,可以结合光谱和空间信息,合并邻近的同质对象,从而控制分割后的同质对象的数量,提高分割的精度。
从玄武区的遥感影像可以看出,玄武湖及研究区内的其他湖泊,选择较大的分割尺度就能得到较好的同质对象;植被主要集中于紫金山风景区、主城区的道路两旁以及小区的绿地,前者分布较为集中较容易分割,而后者分布分散,且大多和建筑用地混杂在一起,较难分割;建筑用地主要为主城区的居民地和商业区,这些独立的建筑都比较破碎,当选择较大的分割尺度时,容易导致其边界轮廓模糊,从而和道路混淆;道路分割尺度的设定主要和道路的等级有关,对于主干道,选择较大的分割尺度即可,但对于支路,设置较小的分割尺度可避免与建筑用地的混淆;研究区内的裸地主要为待建设的工地以及少量植被边缘的荒地,多成块出现,易于分割。
经过多次试验,对比了多种分割阈值得到的同质对象与实际地物的轮廓边界后,本文将分割尺度设置为10、合并阈值设置为90%。在此基础上,可以得到分割效果较好的同质对象。
3.影像分类
面向对象的分类不同于传统的基于像素的分类方法,它是以原始影像分割后生成的同质对象为基础来进行分类的。本文主要使用两种分类方法,即面向对象的KNN分类方法和面向对象的SVM分类方法来进行影像分类。
(1) 面向对象的KNN分类
KNN(k-nearest neighbor algorithm)算法最早由T Cover等提出[8],算法的基本思路是:计算待分类样本x与每一个训练样本的距离,对距离进行排序,从中选择距离最近的K个训练样本作为x的K个最近邻,并根据这K个最近邻判断样本x的所属类别。常用的距离有欧氏距离和马氏距离等[9]。
KNN算法在计算时只与相邻的K个训练样本有关,当训练样本数量分布不均匀时,易导致训练样本数量较少的类别的分类精度降低,从而影响整体的分类精度。此外,KNN算法在分类过程中需要计算待分类样本与每一个训练样本的距离,因此运算量较大,且最近邻的K值不易确定,一般通过比较不同K值时的分类精度以确定合适的K值。
在进行面向对象的KNN分类时,在训练样本的特征空间中加入影像的自定义特征函数NDVI、影像自身的空间特征和纹理特征,并将K值设置为5。图2为基于面向对象的KNN分类得到的结果。
(2) 面向对象的SVM分类
支持向量机(support vector machine,SVM)是一种监督式学习方法,由V Vapnik于1995年首先提出[10],目前主要应用于手写字体识别、文本分类、遥感影像分析等领域。
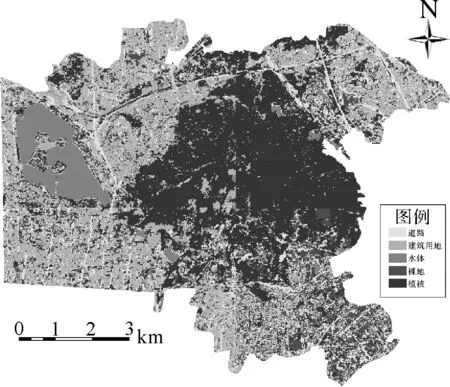
图2 基于面向对象的KNN分类结果
SVM算法基于结构风险最小化理论,在特征空间中建构最优分割超平面,使得学习器得到全局最优化。SVM算法是针对线性可分情况进行分析,对于线性不可分的情况,可以使用非线性映射算法,将样本空间映射到高维的特征空间中,从而将线性不可分问题转化为线性可分的问题[11-12]。
在进行SVM分类时,向训练样本的特征空间中加入影像的自定义特征函数NDVI、影像自身的空间特征和纹理特征,并将核函数设置为二次多项式。图3为基于面向对象的SVM分类得到的结果。
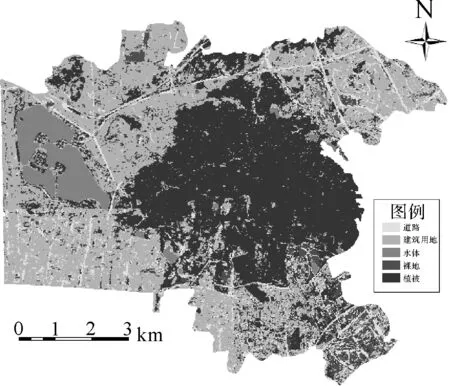
图3 基于面向对象的SVM分类结果
四、结果分析及精度评价
首先利用ArcGIS软件,统计了两种分类方法得到的各类地物的面积。结果如图4所示。
从图中可以看出,基于面向对象的KNN分类方法得到的道路、裸地、水体和植被的面积均大于基于面向对象的SVM分类方法得到的面积,而得到的建筑用地的面积明显小于后者。
本文采用混淆矩阵法对南京市玄武区的影像分类精度进行评价。混淆矩阵用于表示分为某一类别的像元个数与地面检验为该类别的比较,通常行代表参考数据,列代表由遥感数据分类得到的类别数据。通过ArcGIS软件在试验区随机产生了97个样本点,结合野外调查数据及南京市的矢量数据,建立了混淆矩阵。结果见表1—表2。

图4 面积统计
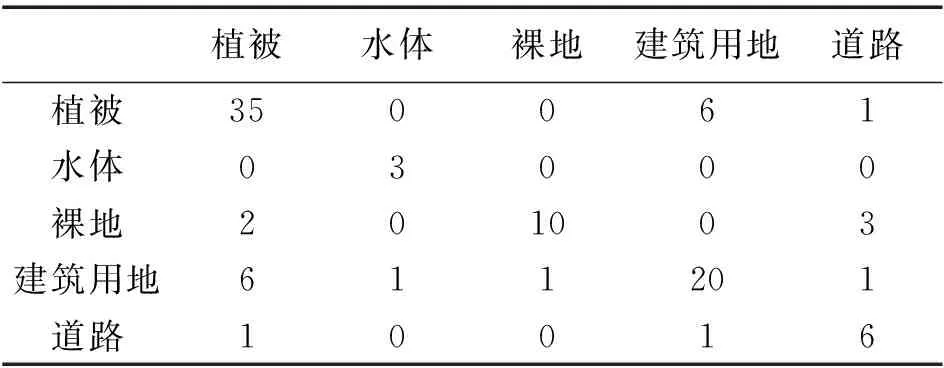
表1 基于面向对象的KNN分类的混淆矩阵
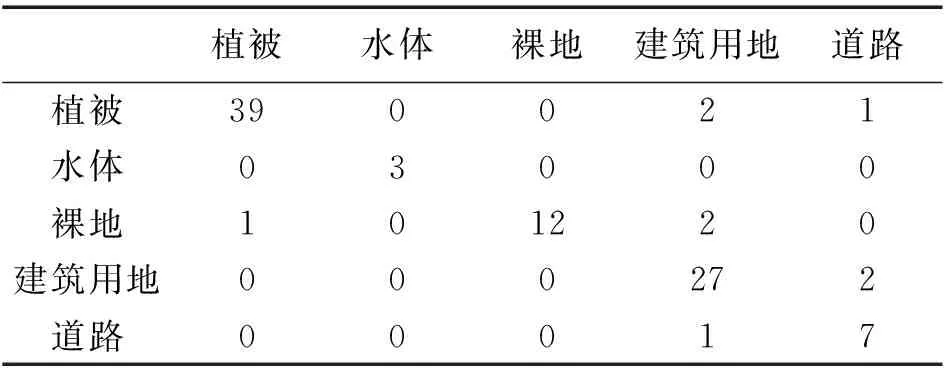
表2 基于面向对象的SVM分类的混淆矩阵
在混淆矩阵的基础上,本文采用两类指标来进行精度评价,分别为总体分类精度t和Kappa系数。设混合矩阵A为一个n×n的矩阵。总体分类精度为
(1)
式中,P1为分类后影像中与实际地物相符的像元的个数;P2为总的样本个数,即
(2)
(3)
Kappa系数是另外一种计算分类精度的方法。它的计算公式为
(4)
式中,mi+和m+i分别表示矩阵A的第i行和第i列的总和。
表3为对两种分类方法进行总体分类精度和Kappa系数计算得到的结果。

表3 精度评价 (%)
从表中可以看出,基于SVM的分类方法的总体分类精度达到90.72%,Kappa系数达到86.64%。而基于KNN的分类精度为76.29%,Kappa系数为65.75%。相比于基于面向对象的KNN分类方法,基于面向对象的SVM分类方法得到的结果的精度更高。
此外,从分类的结果图及面积统计图可以发现:①由于试验区的水体较为集中,在高分辨率遥感影像上表现出大片均匀的色调,因此,两种分类方法对水体提取的准确率都较高。但是仔细对比会发现,基于KNN的影像分类得到的水体的面积偏大,对玄武湖进行分类时,有部分水体被误分为建筑用地。②在对植被进行分类时,植被较为集中的紫金山地区的分类效果较好;但是主城区道路两旁的植被由于本身较为破碎,且受到了阴影的干扰,影响了分类精度。③两种方法对裸地的分类结果都较好,玄武区的裸地主要集中于西北和东南角,多为待建设的工地。④由于主城区的建筑都较高,建筑的阴影影响到建筑用地和道路的区分。对于等级较高的道路,如30~40 m的主干道、20~24 m的次干道,分类精度较高;但是对于宽度较窄的支路、小道,分类精度较低。⑤基于KNN得到的建筑用地的面积明显低于基于SVM得到的结果,经过对比分析,发现主城区有大量的建筑用地被错分为其他土地利用类型。
五、结论与展望
本文主要探讨了对资源三号卫星遥感影像进行分类过程中的技术方法,并得出以下结论:
1) 影像分割尺度的选择决定了影像的分类精度,且分割尺度与影像的实际情况有关。因此,在对影像进行分割时需要根据实际情况进行多次试验,选择合适的阈值。分割结束后,还可以针对分割结果的具体情况,进行一定的对象合并。
2) 本文选择了两种不同的方法进行分类,从最终的结果可以看出,两种方法对于同类地物大面积分布的区域得到的结果都较好,但是对于地物分布较为破碎的区域,分类结果的错误较多。通过对分类精度进行分析,表明了基于面向对象的SVM分类方法得到的分类结果较好,更适合用于资源三号卫星影像的分类。
[1] 蒋永华,张过,唐新明,等.资源三号测绘卫星三线阵影像高精度几何检校[J].测绘学报, 2014, 42(4): 523-529.
[2] 曹海翊,刘希刚,李少辉,等.“资源三号”卫星遥感技术[J].航天返回与遥感, 2012, 33(3): 7-16.
[3] 丁晓英.eCognition在土地利用项目中的应用[J].测绘与空间地理信息,2006,28(6): 116-117.
[4] BAATZ M, SCHAPE A.Multiresolution Segmentation: An Optimization Approach for High Quality Multi-scale Image Segmentation[C]∥Angewandte Geographische Informationsverarbeitung Ⅻ.Heidelberg:[s.n.],2000.
[5] MYINT S W, GOBER P, BRAZEL A, et al.Per-pixel vs.Object-based Classification of Urban Land Cover Extraction Using High Spatial Resolution Imagery[J].Remote Sensing of Environment, 2011, 115(5): 1145-1161.
[6] 苏伟,李京,陈云浩,等.基于多尺度影像分割的面向对象城市土地覆被分类研究——以马来西亚吉隆坡市城市中心区为例[J].遥感学报, 2007, 11(4): 521-530.
[7] 林先成,李永树.成都平原高分辨率遥感影像分割尺度研究[J].国土资源遥感,2010(2):7-11.
[8] COVER T, HART P.Nearest Neighbor Pattern Classification[J].IEEE Transactions on Information Theory, 1967, 13(1): 21-27.
[9] 李蓉,叶世伟,史忠植.SVM-KNN 分类器——一种提高 SVM 分类精度的新方法[J].电子学报, 2002, 30(5): 745-748.
[10] VAPNIK V.The Nature of Statistical Learning Theory[M].[S.l.]:Springer,1999.
[11] 黄立贤,沈志学.高光谱遥感图像的监督分类[J].地理空间信息, 2011, 9(5): 81-83.
[12] 张学工.关于统计学习理论与支持向量机[J].自动化学报, 2000, 26(1): 32-42.
Research on Object-oriented Classification with ZY-3 Satellite Image
XUE Mengjiao,CHEN Gang,ZHANG Xiao,YU Jing,DUAN Miaoran,CHEN Ruifang
薛梦姣,陈刚,张笑,等.面向对象的资源三号卫星影像分类研究[J].测绘通报,2015(7):42-45.
10.13474/j.cnki.11-2246.2015.0207
2014-05-21
国家科技支撑计划(2012BAH28B04-05)
薛梦姣(1990—),女,硕士生,主要研究方向为遥感影像解译。E-mail:xuemengjiao1101@163.com
P237
:B
:0494-0911(2015)07-0042-04
猜你喜欢
小读者·爱读写(2023年4期)2023-06-28 18:27:56
江苏安全生产(2023年12期)2023-02-02 03:21:24
内蒙古民族大学学报(社会科学版)(2020年2期)2020-11-06 09:08:52
幼儿智力世界(2019年12期)2019-10-26 02:26:47
电子测试(2018年15期)2018-09-26 06:01:34
电测与仪表(2017年24期)2017-12-19 05:15:24
太空探索(2016年5期)2016-07-12 15:17:55
现代计算机(2016年12期)2016-02-28 18:35:25
现代教育科学(2015年2期)2016-01-11 01:14:20
时代英语·高三(2014年5期)2014-08-26 17:01:17