
惯性稳定平台力矩电机选择及驱动系统设计*
2015-05-05 07:33冯佳佳邱国廷安庆勇牛海东
现代防御技术 2015年4期
冯佳佳,邱国廷,安庆勇,牛海东
(北京航天新风机械设备有限责任公司,北京 100854)

惯性稳定平台力矩电机选择及驱动系统设计*
冯佳佳,邱国廷,安庆勇,牛海东
(北京航天新风机械设备有限责任公司,北京 100854)
用于航空遥感测量的大负载惯性稳定平台是机电一体化的高精度设备,具有体积小、重量轻、承载比大的特点。大负载惯性稳定平台的主要作用是隔离环境和飞行载体自身等扰动因素对成像载荷的影响作用,为成像载荷提供稳定的工作平台。而驱动系统则是实现平台稳定控制的重要环节。针对大负载惯性稳定平台控制系统的稳定回路设计,进行了干扰力矩计算和力矩电机选型,选择了单级齿轮传动方式,并设计了力矩电机电流环功率驱动;仿真结果表明,所设计的驱动系统可以高速的响应输入指令,且对飞机干扰角运动有良好的抑制能力。
大负载惯性稳定平台;驱动系统;力矩电机;电流环;扰动;仿真
0 引言
大负载惯性稳定平台作为陀螺稳定平台的分支在航空遥感测量中寻找到应用可能[1-5]。它用来消除干扰、隔离飞行载体的角运动,维持观测载荷视轴稳定,为高分辨率遥感测量提供有效保障[6-8]。选择合适的电机和设计较好的驱动系统,是设计大负载机载航空遥感测量用惯性稳定平台的一个关键。文章针对大负载惯性稳定平台体积小、重量轻和承载大的特点,选择了合适的力矩电机,通过电流环的仿真实验,验证所选的力矩电机和设计的驱动系统具有良好的性能,满足大负载惯性稳定平台的需要。
1 大负载惯性稳定平台工作原理
大负载惯性稳定平台包括机械台体(三轴框架)和伺服控制系统两部分,伺服控制系统中稳定回路的作用是隔离环境及飞行载体对放置在稳定平台上的成像载荷的扰动作用[9-13]。
图1所示为惯性稳定平台工作原理框图。当扰动力矩作用于稳定平台,框架相对于惯性空间产生运动,安装在框架上的陀螺仪检测出该角速度信息,此信息经过校正网络后形成电机驱动信号,驱动系统产生控制力矩来抵消干扰力矩的影响,达到平台框架稳定的目的。
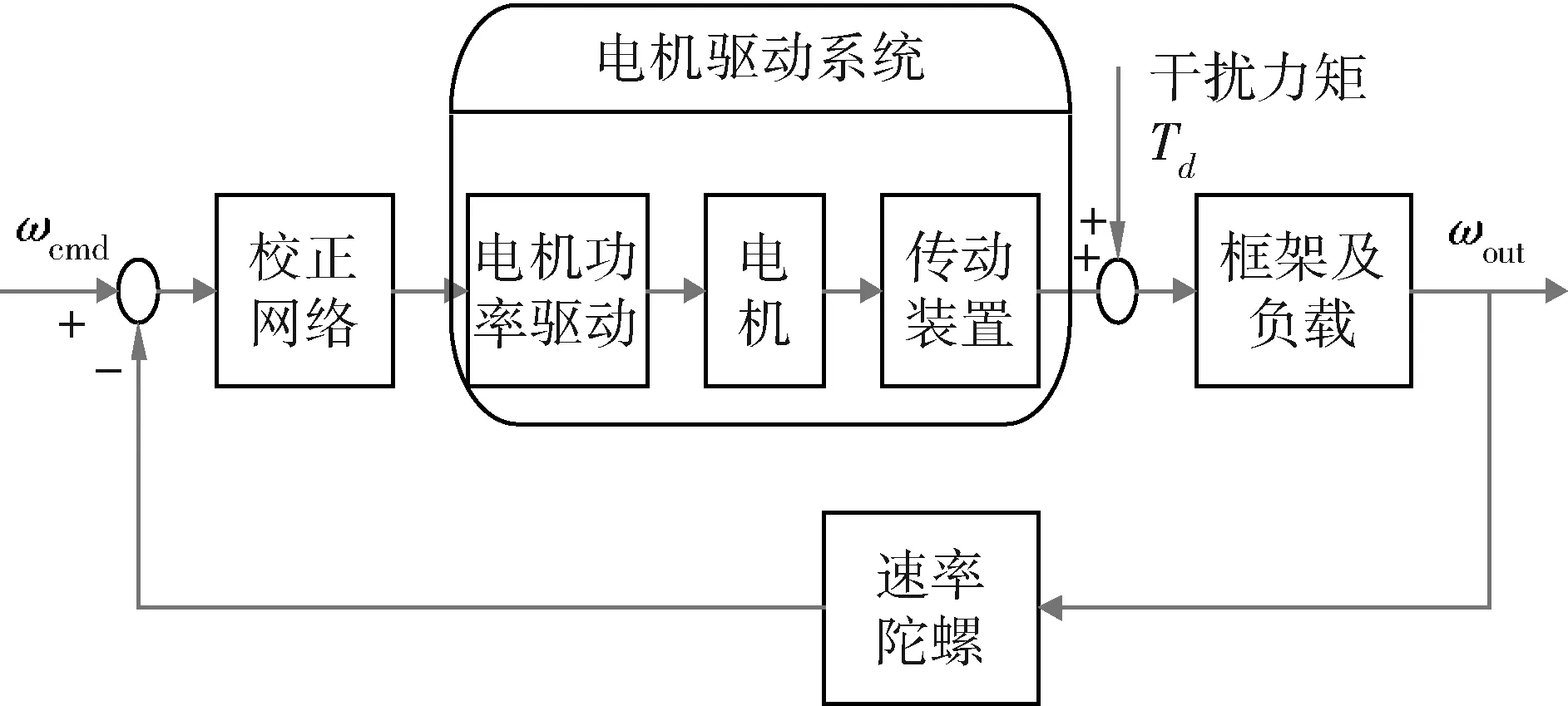
图1 惯性稳定平台工作原理框图Fig.1 Scheme of stable loop
惯性稳定平台的驱动系统是控制系统的重要环节,是实现惯性稳定控制的执行机构,由力矩电机、传动装置以及电机功率驱动单元3部分组成。
2 惯性稳定平台驱动系统设计
惯性稳定平台的驱动方式直接影响到平台的机械结构、尺寸、重量,以及平台的带负载能力,本文以惯性稳定平台的横滚框为例,说明驱动系统设计过程。
2.1 平衡扰动的驱动力矩计算
电机输出的驱动力矩T主要克服以偏心力矩Tos和摩擦力矩Tf为主的干扰力矩,并驱动框架转动。转矩平衡方程为
(1)
式中:J为框架转动惯量;Ω为框架角速度。
(1) 偏心力矩Tos
偏心力矩主要是由于稳定平台框架的加工误差、平台承载的各种航空摄影载荷的质量分布不同、胶片类成像载荷在摄像过程中质心移动等原因引起的。而且,重力加速度ag和天向干扰加速度ad都对横滚框有影响作用,这样,偏心力矩的计算公式为
Tos=m(ag+ad)los,
(2)
式中:los为质心偏移量;m为框架质量;Tos为框架偏心力矩。当干扰加速度与重力加速度同向时,偏心力矩Tosmax最大。
(2) 摩擦力矩Tf
摩擦力矩主要包括框架轴承摩擦力矩Tf1、核算到框架侧的电机摩擦力矩Tf2。其计算公式分别为
Tf1=μm(ag+ad)d/2,
(3)
Tf2=N·Tfm,
(4)
式中:μ为轴承摩擦因数;d为轴承直径;N为传动比;Tfm为电机摩擦力矩。当干扰加速度与重力加速度同向时,摩擦力矩最大,记为Tfmax。
(3) 最大驱动力矩Tmax
一般为了满足工程需要,提高系统的可靠性,计算时取1.5倍的转矩裕量,因此,最大驱动力矩为
(5)
2.2 传动方式选择
稳定平台常用的驱动方式有直接驱动和齿轮传动[14]。直接驱动是将力矩电机同轴的安装在框架轴上,不通过齿轮、同步带等任何传动装置,直接驱动框架转动;齿轮传动则是在电机和框架之间增加了齿轮系。图2,3分别为直接驱动和齿轮传动的示意图及传递函数框图。直接驱动在实现方式上较简单,机械损耗较低,但承载能力较小。齿轮传动在制造和安装精度上要求较高,但结构稳定可靠,可以满足较大的负载要求。为满足平台体积小、重量轻、承载大的要求,采用了一级齿轮传动方式,实现使用小体积、小重量的力矩电机,达到降低转速、增加转矩的目的。为了降低齿隙误差对控制精度的影响,选用了齿隙较小的“双面齿”齿轮。

图2 直接驱动示意图及传递函数框图Fig.2 Direct drive and transfer function block diagram
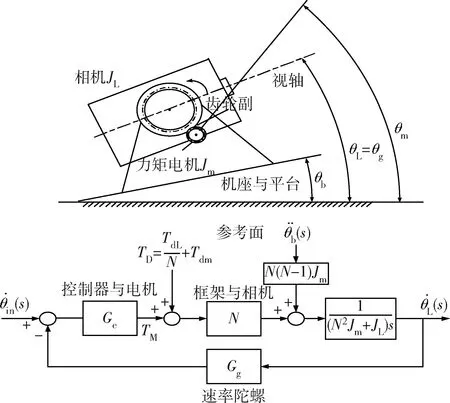
图3 齿轮传动示意图及传递函数框图Fig.3 Gear drive and transfer function block diagram
2.3 力矩电机选型
直流力矩电机的主要特点为转速低、转矩大、线性度好,可以运行在很低的转速下,甚至在堵转下长期工作,非常适合惯性稳定平台这类的低转速控制系统。
图4为直流力矩电机机械特性曲线。选取直流力矩电机时,主要考察电机在峰值驱动电压Upeak作用下的堵转力矩Tstall和最大空载转速ωNL,对应于图4中的直线1。力矩电机的任何工作点都应位于直线1下。

图4 直流力矩电机机械特性曲线Fig.4 Mechanical characteristic of torque motor
表1为美国丹纳赫稀土永磁有刷直流力矩电机QT-2603的各项指标参数。经核算完全满足横滚框驱动需要,选择该电机作为平台横滚框执行部件。
3 力矩电机电流环设计
由于直流力矩电机的转矩输出与电枢电流严格成正比,因此,电流环可以控制电机驱动系统输出转矩的大小,提高系统的动态响应速度,并很好的抑制电机电枢反电动势干扰,从而缩短干扰力矩对稳定平台的有效作用时间,提高负载姿态的稳定性。图5为所设计电流环的电机功率驱动原理框图。

表1 QT-2603力矩电机的主要参数Table 1 Parameters of QT-2603 torque motor
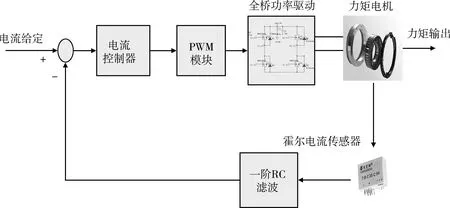
图5 带有电流环的电机功率驱动原理框图Fig.5 Functional block diagram of motor driver with current loop
3.1 电机功率驱动建模
电流环电机功率驱动模型主要包括电机电枢模型、电流检测模型、电流控制器模型、以及PWM功率驱动模型,图6为电流环传递函数框图。
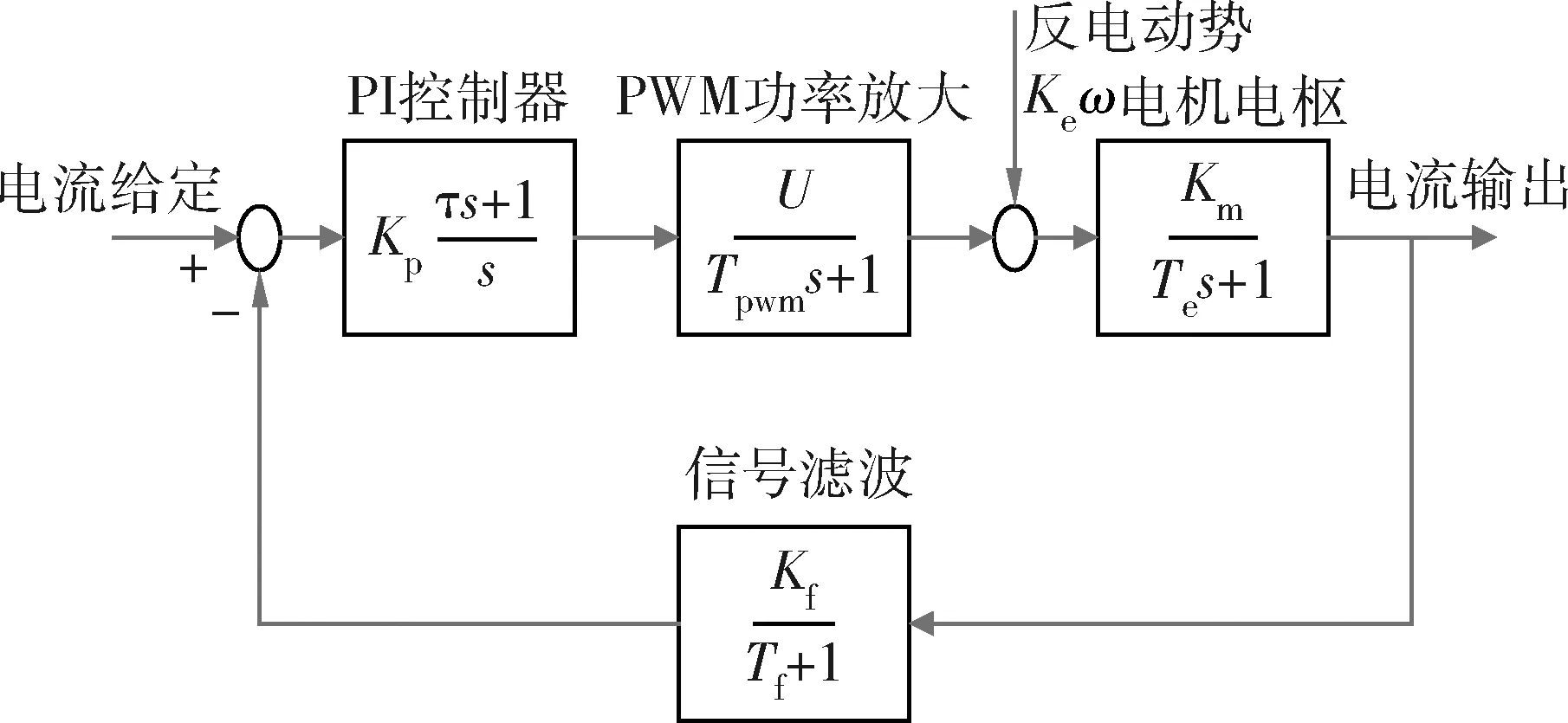
图6 电流环传递函数框图Fig.6 Transfer function block diagram of current loop
(2) 电机反电动势干扰为Keω,Ke为反电动势系数,ω为电机转速。

(4) 电流控制器一般采用PI校正环节,将电流环校正为一阶无差系统。PI控制器的传递函数为
(5) PWM功率驱动传递函数可近似为一阶惯性环节,供电电压为U,则传递函数为
3.2 PI控制器参数设计

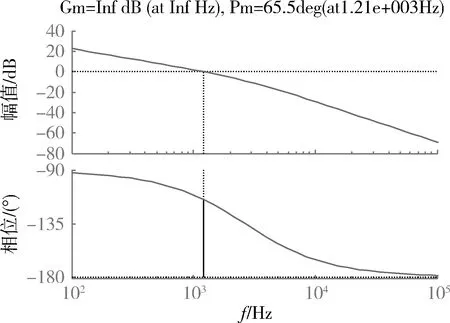
图7 开环伯德框图Fig.7 Open loop bode diagram
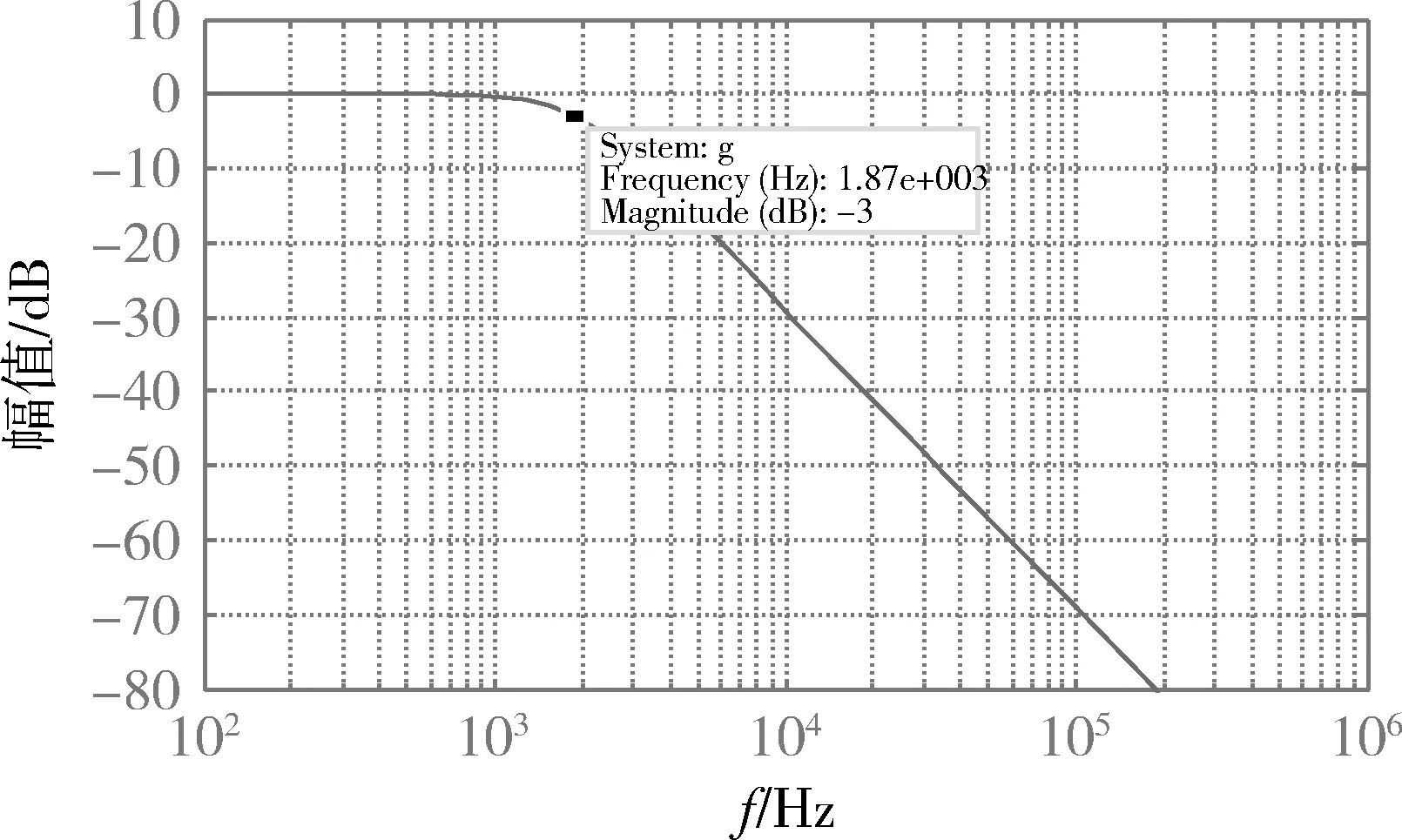
图8 闭环伯德框图Fig.8 Close loop bode diagram
4 扰动作用下平台系统性能分析
环境扰动和机座角运动是稳定平台的主要干扰源,反映到驱动系统则转换为电流指令输入和电机反电动势扰动[15]。对应相应的指令电流,电机可产生反抗力矩来消除环境扰动的作用;而电流环通过抑制反电动势扰动即可达到抑制机座干扰角运动的目的。电流环对不同干扰信号的抑制能力,可以反应出驱动系统性能的优劣。图9~12为分别针对不同情况所得出的仿真图。

图9 阶跃电流输入响应Fig.9 Response of step current input

图10 正弦电流输入响应Fig.10 Response of sin current input
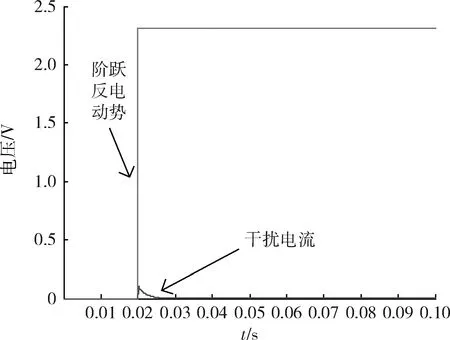
图11 阶跃反电动势输入响应 Fig.11 Response of step back EMF input

图12 正弦反电动势输入响应Fig.12 Response of sin back EMF input
由仿真可以得到如下分析结果:
(1) 阶跃干扰力矩响应
设平台受到阶跃干扰力矩作用,需要力矩电机迅速建立相应大小的电流并输出反向力矩以抵消干扰力矩造成的影响。仿真结果显示电流上升时间<300 μs, 超调量为4%。
(2) 正弦干扰力矩响应
设平台受到频率为100 Hz的正弦干扰力矩作用,则电流环需要产生频率为100 Hz的相应幅值的正弦电流。仿真结果显示,电流环跟踪100 Hz电流输入时,幅值仅衰减2.61×10-5dB, 相位滞后仅为4.34°。
(3) 阶跃干扰角速度响应
设飞机引入阶跃干扰角速度,电机产生2.31 V阶跃反电动势并作用于电流环。由图11的仿真结果可以看出,电流环仅产生一个时间长度为0.01 s,最大度幅值为0.1 A的干扰电流,对框架的影响很小。
(4) 正弦干扰角速度响应
设飞机引入幅值为频率为10 Hz的正弦干扰角速度输入,电机产生2.31 V正弦反电动势,通过仿真计算,电流环出现幅值仅为0.02 A的电流波动,电流环表现出对正弦反电动势干扰强烈的抑制能力。
5 结束语
选择的一级齿轮驱动方式能获得了较大的转矩,以微小的性能损失实现了小力矩电机驱动大负载系统的目的,满足大负载惯性稳定平台驱动的需要,同时并使整个平台系统结构紧凑;仿真结果表明,设计的电流环功率驱动具备良好的动态性能,具有高速、高精度电流跟踪能力,以及较强的反电动势干扰抑制能力,满足稳定平台控制系统的需要。
[1] ZHOU Jun, LI Ji-su, MU Xiao-gang. Variable Structure Active Vibration Control and Experiment Research for Flexible Satellites[J]. Aerospace Control, 1996, 4(1):1-6.
[2] WEI Tong, FANG Jian-cheng. Self-Excited Vibration Depression of High-Speed Rotor in Magnetically Suspended Control Moment Gyroscope[J]. Journal of Astronautics,2006, 27 (2):291-295.
[3] JIA Lin, MENG Wei-feng. Sliding Mode Variable Structure Control in the Stabilization Loop of Inertial Platform [J].Science Technology and Engineering, 2009, 19(2): 433-436.
[4] TAN Ping, ZHOU Fu-lin. Damping Control System and Its Optimal Design[J]. Journal of Architecture and Civil Engineering, 2007, 24 (2): 6-12.
[5] SUN Zuo-yu, HE Yu-ao. Semi-Active Structural Control Ga by Variable Dampers [J]. Journal of Tianjin University, 2000, 33(1):29-32.
[6] XU Jiang-ning, ZHU Tao, BIAN Hong-wei. Gyro-Stabilized Platform for Aerial Photography [J]. Chinese Journal of Scientific Instrument, 2007, 28(5):914-917.
[7] Ding Zhu-shun, JIANG Hong-xiang. Application of Inertial Technology to Aerial remote sensor Platform[J]. Navigation and Control,2009, 8(4):34-37.
[8] YANG Shen-ke, WANG Jun-fa, WANG Jian-yu. The Combined Technology of POS and Stabilized Platform Control in Airborne Remote Sensing [J]. Electronics Optics & Contro, 2008, 15(2):62-65.
[9] NIU Li, LI Li, ZHUANG Liang-jie. Active Disturbance Rejection Control of Stabilizing Circuits for Inertial Platform [J]. Journal of Chinese Inertial Technology, 2004, 12(6): 48-51.
[10] J M.HILKERT. Inertial Stabilized Platform Technology Concepts and Principles[J].IEEE Control Systems Magazine, 2008, 28(1): 26-46.
[11] USUI R, OHNO A. Recent Progress of Fiber Optic Gyroscopes and Applications at JAE[C]∥Optical Fiber Sensors Conference Technical Digest, 2002, 1:11-14.
[12] RODRIGUEZ, R B G., FERREIRA E C.. Zero-Crossing Demodulation for Open Loop Fiber Optic Gyroscopes[C]∥Microwave an Optoelectronics Conference, 2001, 1:149-152.
[13] Lauro Ojeda, Hakyoung Chung, Johann Borenstein. Precision-Calibration of Fiber-Optics Gyroscopes for Mobile Root Navigation[C]∥IEEE International Conference on Robotics and Automation, 2000, 4: 2064-2069.
[14] Michael K Masten.Inertially Stabilized Platforms for Optical Imaging Systems[J].IEEE Control Systems Magazine, 2008, 28(1) : 47-64.
[15] LIU Song-bin, WANG Ming-yan, TIAN Kai.Research on Loading Simulation of DC Torque Motor for Electrical Load Simulator[C]∥3rd IEEE Conference on Industrial Electronics and Applications, 2008:1146-1150.
Selecting Torque Motor of Inertial Stable Platform and Designing Drive System
FENG Jia-jia, QIU Guo-ting, AN Qing-yong, NIU Hai-dong
(Beijing Aerospace New Wind Machinery Co., Ltd,Beijing 100854,China)
The large load three-axis inertial stable platform (ISP) is a high-precision equipment for airborne remote sensing measurement system featuring small size, light weight and large load ratio. The main role of the large load ISP is to isolate the carrier’s own environment and flight disturbance factors, and provide a stable environment. The drive system is an important part of platform stability control. According to the design of the ISP control loop, the calculations of disturbing torque and motor selection method have been proposed, including choosing the single-stage gear transmission mode and designing a power-driven torque motor current loop. The simulation results show that the designed high-speed drive system can respond to input commands, and it can suppress the interference very well.
large load inertial stable platform; drive system; torque motor; current loop; disturbance; simulation
2014-11-04;
2015-01-14
冯佳佳(1986-),男,山东枣庄人。硕士生,主要从事导航、制导与控制。
通信地址:100854 北京市142信箱80分箱 E-mail:fengjiajia888@163.com
10.3969/j.issn.1009-086x.2015.04.018
V556;TP391.9
A
1009-086X(2015)-04-0106-06
猜你喜欢
微电机(2022年8期)2022-10-12
中学生数理化·八年级物理人教版(2022年3期)2022-03-16
中学生数理化·八年级物理人教版(2021年3期)2021-07-22
郑州大学学报(工学版)(2020年2期)2020-06-16
汽车维修技师(2019年7期)2020-01-16
汽车电器(2019年2期)2019-03-22
汽车维修技师(2018年11期)2018-05-11
科教导刊·电子版(2017年16期)2017-07-21
中学生数理化·高一版(2017年1期)2017-04-25
中学生数理化·八年级物理人教版(2014年1期)2015-01-09
