
散裂中子源慢化器反射体遥控维护工艺研究
2015-04-25 09:51:20马静静赵崇光李常峰贾学军
制造业自动化 2015年13期
马静静,汤 泓,赵崇光,李常峰,贾学军
MA Jing-jing1,2, TANG Hong1,2, ZHAO Chong-guang1,2, LI Chang-feng1,2, JIA Xue-jun3
(1.中国科学院高能物理研究所东莞分部,东莞 523803;2.东莞中子科学中心,东莞 523803;3.中国科学院物理研究所,北京 100190)
0 引言
我国迄今最大的国家重大科学装置——中国散裂中子源(以下简称CSNS)将于2017年前后建成[1]。CSNS的建成将在物理学、化学、生命科学、材料科学、生命科学、环境科学等领域对中国及东南亚地区产生巨大的社会和经济效益[2]。CSNS建成后将进入世界四大散裂中子源行列,成为发展中国家拥有的第一台散裂中子源[3]。慢化器反射体是中国散裂中子源靶站的核心部件,设计寿命10年,寿命期满后进行维护更换。
慢化器反射体插件是CSNS靶站核心部件,慢化器将高能质子入射靶后通过散裂反应产生的高能量中子慢化为低能量中子供中子散射实验使用,反射体集反射、慢化和新产生中子的能力为一体。反射体结构庞大,总重约32t,呈圆柱形台阶状,最大直径1.3米,最小直径1米,高4.59米,由于高度较高,为了便于维护更换,设计为四段,段与段之间通过长螺栓连接。慢化器安装在最下段反射体内部,慢化器进出水管和低温冷却管向上延伸,固定在反射体侧壁上,慢化器和反射体以整体插件的形式进行安装。散裂反应产生中子的同时也产生大量的放射性核素,并向外发射二次粒子,如γ射线,α射线等,该粒子将慢化器反射体插件活化,因此整个维护过程必须遥控操作。
1 慢化器反射体遥控维护流程
慢化器反射体插件安装在靶站氦容器内,更换时首先要将其从氦容器中吊出,然后转运至存储容器,在吊装前要进行一系列前处理工作。具体遥控维护流程如下。
1.1 剪管
下面三段辐射较强的慢化器反射体插件的吊装需要屏蔽容器,为了节省屏蔽容器空间,吊装前先将与插件固定且高出插件的工艺管剪断。工艺管主要有进出水管和低温输送管,低温输送管为三层管道,内层管为真空绝热管、中间为冷却介质管、外层是检漏气体管,该种管道在增强管道性能的同时也增加了遥控维护条件下的剪切难度,要求剪管工具具有较高的性能,选用国外进口液压剪刀[4]。整个剪管过程工作人员不准直视,在剪管之前将摄像头安装在长柄操作杆上,放入氦容器合适位置,通过观察视频系统显示屏进行剪管。液压剪刀安装在另一条长柄操作杆上,吊车将其吊入氦容器,工作人员利用一端可夹紧竖直长柄的水平操作杆调整液压剪刀的位置。
1.2 夹管
管道剪断后将其从氦容器中夹出,然后吊入储存容器储存。夹管工具安装在竖直操作长柄上,通过水平操作横杆调整位置,具体夹管过程与剪管过程相同。
1.3 拆螺栓
为了便于维护,慢化器反射体插件设计为四段,段与段间均通过四根长螺栓连接固定,吊装前确保螺栓拆松。用气动扳手进行拆螺栓,气动扳手安装在竖直长柄上,通过水平操作横杆调整位置,具体拆卸过程与剪管过程相同。
1.4 吊装
由于最上段反射体插件放射性很小,直接裸吊出氦容器,下面三段放射性较强不能裸吊,吊装过程需要屏蔽罩(也称转运容器)[5]。每段反射体顶部中心位置固定一个吊装螺栓,利用带内螺纹、通电后可自动开合的zip-lift吊具与吊装螺栓咬合。由于顶部吊车高度十几米,且吊车运行和起吊速度太快,很难完成zip-lift吊具与吊装螺栓的精密捕捉,因此设计了一台可移动三轴平台进行吊装。
首先将转运容器定位到氦容器口正上方;其次将三轴平台固定在转运容器顶部,在固定之前已将挂在三轴平台上的zip-lift吊具中心调至转运容器顶部吊装口中心。将zip-lift吊具吊入氦容器与吊装螺栓精密捕捉;然后将慢化器反射体插件吊入转运容器,推入推拉抽屉,慢化器反射体插件放置在推拉抽屉上,松开吊具,盖上吊装孔盖;最后利用顶部吊车将三轴平台先吊走,再将转运容器吊至热室顶部吊装口正上方。
1.5 转运
慢化器反射体插件吊入热室的过程与吊入转运容器过程相同,吊入热室后利用热室内吊车将其转运至地下室储存容器。
2 慢化器反射体遥控维护设备
2.1 长柄液压剪刀
液压剪刀液压泵功率3675瓦,液压剪刀最大输入压强为34.5Mpa,通过在液压泵上安装压强表进行测试,最大输出压强为78Mpa。因此该液压的额定压强能够满足实验要求。原装液压剪刀为手持式,将其改装,通过螺栓固定在长柄操作杆上,如图1所示。通过试验证明长柄液压剪刀可顺利完成三层管道的剪切,图2为被剪断的三层管。
2.2 长柄夹具
夹具的驱动方式为气缸驱动,由于管道的外径和长度不同,针对不同外径的管道,夹具夹头的设计采用加大角度夹头,并为能够稳定地夹紧较长管道,将夹具设计成三爪结构,将三爪结构安装在长柄操作杆上,针对不同方向的管设计了横向夹具和纵向夹具,如图3所示。通过试验证明该夹具可顺利夹取各种断管,图4为夹取试验结果。

图1 长柄液压剪刀

图2 剪断的三层管

图3 横向夹具和纵向夹具

图4 夹取试验结果
2.3 长柄气动扳手
为了防止气动扳手拆装螺栓时将反射体定位销打断,且为了更有利于气动扳手与吊装螺栓的定位与拆装,减少在工作时产生的晃动,在气动扳手上焊接一根止转臂,该止转臂能够与反射体上的U型槽实现配合。将气动扳手改装为长柄气动扳手,如图5所示。通过实验证明该气动扳手可顺利拧松长螺栓,图6为长螺栓拧松状态。

图5 改造后的气动扳手
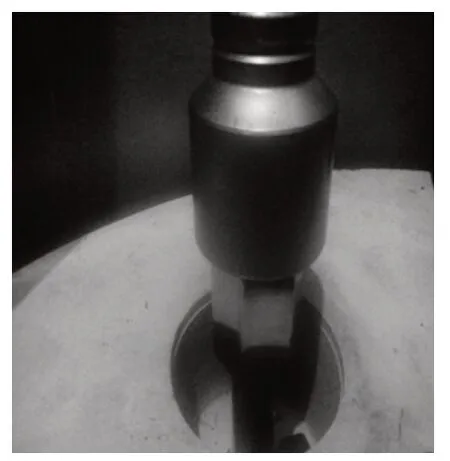
图6 拧松长螺栓
2.4 转运容器
转运容器屏蔽层为铅,由于铅的强度极低,很容易发生变形,桶体屏蔽层由三层组成:内外两层为碳钢筒体,起支撑作用;中间一层罐铅,起屏蔽作用[6]。容器底部开孔,该结构主要包括铅罐体、底座以及底部推拉抽屉。由于底部推拉抽屉体积较大、行程较长,将底座分成左右两段,吊装时对接。由于实际吊装环境较差,左右底座对接精度较低,而推拉抽屉重约3吨,为了减小抽屉与底座的摩擦系数,考虑对接精度较低,最终决定在左右底座和抽屉侧壁固定若干钢珠滚轮。通过电机带动丝杠螺母传动从而实现抽屉的推拉动作。图7为转运容器剖面图。
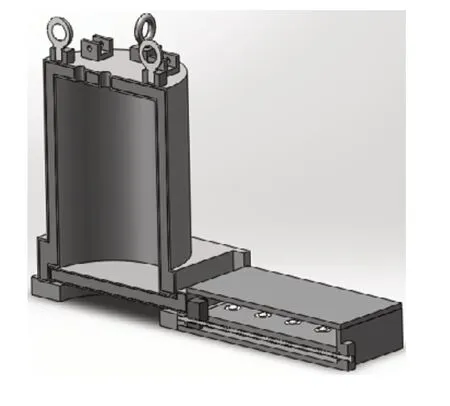
图7 转运容器剖面图
图8 三轴平台
2.5 三轴平台
三轴平台起吊葫芦为环链变频电葫芦,水平横向和纵向的微调通过伺服电机驱动、直线导轨导向。伺服电机的驱动通过远程控制柜遥控操作,为了避免现场调试剂量累计,在吊装前将挂在电葫芦上的zip-lift吊具中心位置与转运容器吊装口中心对准,并将该坐标设置为原点。无论以后将其调整至任何位置,都可通过控制系统回到原点。图8为三轴平台。
3 结束语
通过在试验平台上对模拟慢化器反射体的大量遥控维护试验,开发出一套可行的遥控维护工艺,具体包括维护流程和维护设备。对核电站和大科学辐射装置遥控维护具有一定的参考价值。
[1] 陈延伟.中国散裂中子源(C S N S)[J].中国科学院院刊,2011,26(6):725-728.
[2] 王芳卫,严启伟,梁天骄,等.第一讲 中子散射与散裂中子源[J].物理,2005,34(10):731-738.
[3] 韦杰.中国散裂中子源简介[J].现代物理知识,2007,19(6):22-29.
[4] 陈海彬,郭建文,李荣泳,等.遥控维护条件下冷却管道剪切试验[J].东莞理工学院学报,2013,20(01):51-56.
[5] Quan-zhi YU, Zhi-liang HU, Bin ZHOU. The radiation assessment for the maintenance scenarios of CSNS inner reflector plug . Progress in Nuclear Science and Technology(2013).
[6] 胡文生,陈煜浩.大型短距离防护转运容器的设计与制造[J].核动力工程,1996,17(3):274-278.
猜你喜欢
青少年科技博览(中学版)(2023年9期)2023-11-30 03:42:26
哈尔滨工程大学学报(2023年8期)2023-08-28 03:36:54
疯狂英语·新读写(2022年4期)2022-11-22 09:10:30
疯狂英语·读写版(2022年4期)2022-04-08 00:22:23
花火·慧阅读(2022年4期)2022-03-18 09:27:10
无损检测(2019年7期)2019-07-25 09:42:22
指挥控制与仿真(2018年3期)2018-06-11 12:37:04
凿岩机械气动工具(2017年3期)2017-11-22 07:21:50
军营文化天地(2017年7期)2017-09-25 07:43:48
系统工程与电子技术(2016年11期)2016-11-11 08:22:53
