
分布式全相参雷达相位差闭环跟踪技术
2015-04-20 00:44韩小妹李雁斌
制导与引信 2015年2期
韩小妹, 李雁斌, 黄 勇
(1.空军驻上海航天局军事代表室;2.上海无线电设备研究所,上海200090)
0 引言
分布式全相参雷达要求各单元雷达实现发射相参和接收相参,然而为实现发射相参,需要对目标处各单元雷达发射信号的相位差进行跟踪估计。对于同一目标,由于各单元雷达的分散布设造成雷达与目标的距离各不相同,因此,各单元雷达的发射信号在目标处会产生与其距离差相对应的相位差。同时,分布式系统中各单元雷达间的相位同步误差也会对目标处各信号间的相位差产生影响。因此,需要对目标处各信号的相位差进行跟踪估计,进而利用跟踪结果对发射信号进行相位调整,以实现发射相参的目的[1]。
1 分布式全相参工作原理
分布式全相参雷达系统的工作过程包括接收相参工作模式和发射相参工作模式。系统首先发射正交波形实现接收相参,然后发射相参波形实现发射相参,从而完成全相参工作。
1.1 接收相参工作模式
如图1所示,每部雷达除接收自己发射信号产生的目标回波之外,还接收其他单元雷达发射信号产生的回波,并采用与发射正交波形匹配的一组滤波器,经过精确的接收延时与相位控制,实现匹配相参处理获得N2的最大信噪比增益。
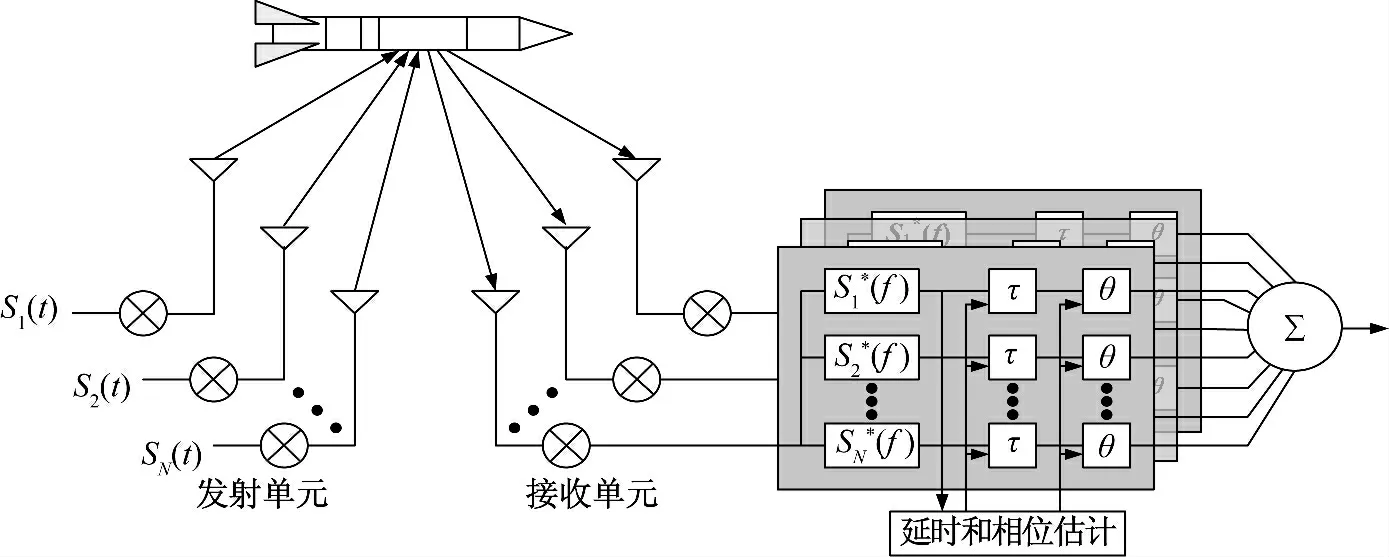
图1 接收相参模式
1.2 发射相参工作模式
分布式全相参雷达的工作原理如图2所示,各单元雷达发射完全相同的波形,通过精确的发射时间和相位控制,使各单元雷达的发射信号在目标处同时同相相加,即发射全相参,这个相参合成的发射信号经目标发射后,由各单元雷达接收,再经过精确的接收延时和相位控制,进行接收相参合成处理,获得N3的最大信噪比增益。
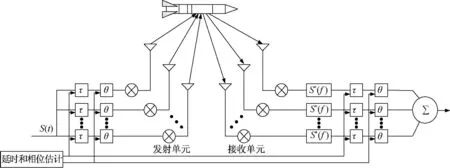
图2 分布式全相参雷达系统框图
2 同步误差对相参性能的影响
基于上述工作原理,针对双站分布式全相参雷达系统,对相参合成后的信噪比改善进行了仿真分析。
假设单元雷达1 和单元雷达2 发射相同波形,并可表示为

式中:u为调频斜率。
两路信号在发射时通过时间和相位补偿确保信号在目标处相参叠加,目标散射回波信号经不同延时后合成产生模拟目标回波,在两部单元雷达内对模拟目标回波信号分别进行匹配滤波(共2个信道),再经过时间和相位补偿实现全相参合成。
图3(a)表示雷达在单站、接收相参、全相参工作模式下的回波信号脉压结果。其中,绿色实线表示单站回波信号的脉压结果,蓝色点划线表示接收相参合成后的脉压结果,红色虚线表示全相参合成后的脉压结果。图3(b)表示雷达在接收相参、全相参工作模式下的合成信噪比改善情况。相对于单站信噪比,蓝色虚线表示接收相参合成信噪比改善,红色实线表示全相参合成信噪比改善。
对图3中的仿真数据分析可知:
a)相对于单站回波,相参合成后脉压信号幅度提高了4倍(N2倍);
b)接收相参合成信噪比改善约为6dB;
c)全相参合成信噪比改善约为9dB。
上述仿真结果与第1 章中的理论分析结果一致。
图4表示雷达在两种工作模式下不同时延误差对合成信噪比的影响情况。
对图4中仿真数据分析可知,雷达在全相参合成工作模式下,信道间的时延误差将导致造成信噪比迅速恶化,约0.04Tp的时延误差(Tp为脉压后的脉冲宽度)就将引起3dB 的信噪比损失;而雷达在接收相参工作模式下,信道间的时延误差对信噪比的影响相对较小。可以看出,分布式全相参雷达对于时间同步误差及相位同步误差的要求非常苛刻,需要专门设计分布式全相参雷达的时间及相位的同步方案。
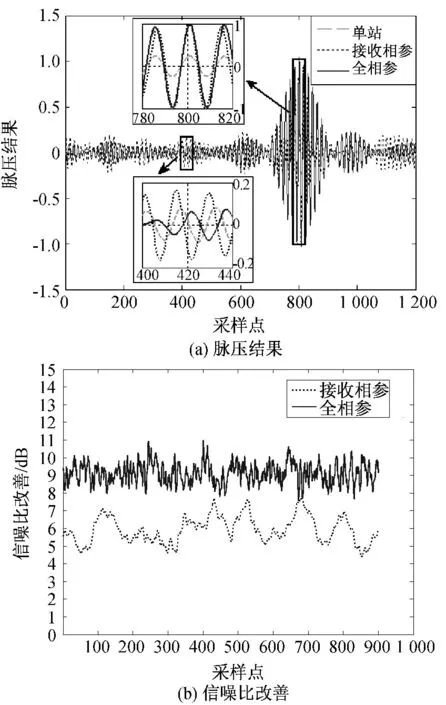
图3 回波信号脉压与信噪比改善结果

图4 不同时延误差对合成信噪比的影响
3 相位闭环跟踪环路
为了实现分布式全相参雷达的相位同步,系统在实现目标检测跟踪的过程中,除了采用经典的距离跟踪环路、速度跟踪环路和角度跟踪环路外,还需增加了相位跟踪环路,对目标处各信号的相位差进行跟踪估计,进而利用跟踪结果对发射信号进行相位调整,以实现发射相参的目的。
首先假设两部单元雷达的发射信号分别为

式中:f0为本振信号中心频率;Δθ为两部单元雷达的相位同步误差。
当上述两个发射信号到达目标时可表示为

因此,在目标处两信号的相位差为

式中:ΔφR 表示路程差R1-R2引起的相位差。
结合分布式全相参雷达的工作原理,下面分别阐述接收相参相位跟踪环路和发射相参相位跟踪环路。
3.1 接收相参相位跟踪环路
在接收相参工作模式下,各单元雷达的发射信号相互正交,因此,在同一雷达上,我们利用各单元雷达回波信号的正交性,通过匹配滤波的方式可以分别得到不同雷达的回波信号。利用不同回波信号的相位信息以得到相位差的估计值,如图5所示。
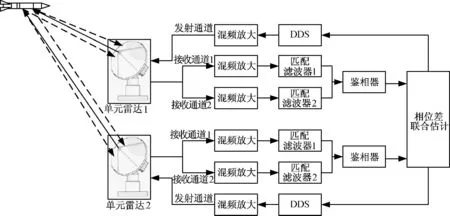
图5 接收相参相位跟踪环路
在单元雷达1处,回波信号经过单元雷达1的本振信号下变频至基带信号,再通过匹配滤波分离出两通道信号:

然后通过鉴相器获得单元雷达1两通道信号的相位差估计


3.2 发射相参相位跟踪环路
在发射相参工作模式下,首先利用相位差估计值对发射的相参信号进行相位调整,实现在目标处两相参信号的同相叠加,并等效为在目标处有一个发射源向两雷达分别发射信号,然后再对相位差进行跟踪。发射相参工作模式下的相位差跟踪如图6所示。
假设目标处两部单元雷达同相叠加后的合成信号为

则两部单元雷达接收到的回波信号分别经过各自的本振信号下变频至基带信号后,可表示为
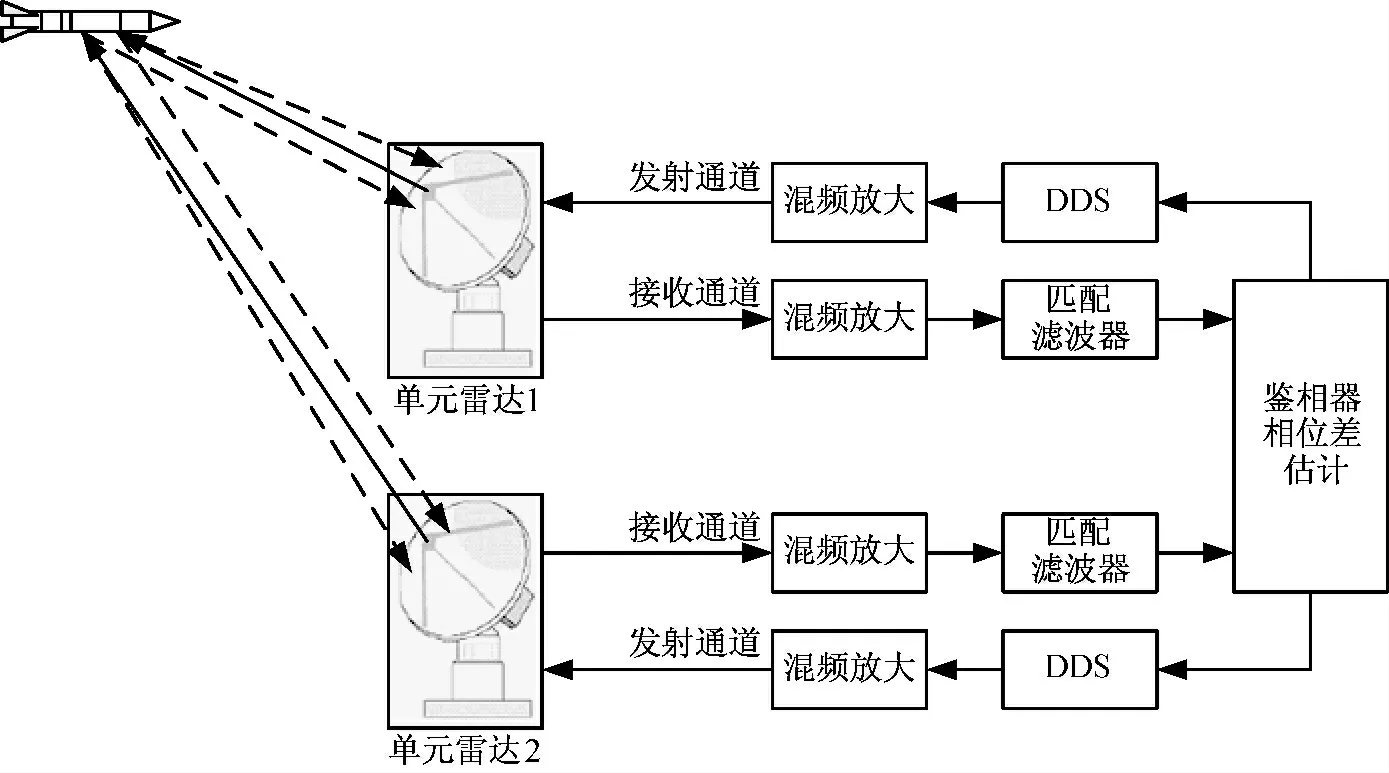
图6 发射相参相位跟踪环路

两路基带信号通过鉴相器获得相位差估计值

比较式(6)与式(14)可得,由于相位同步误差Δθ的存在,发射相参工作模式下得到的相位差估计值

因此,相位同步误差将影响发射相参工作模式下的相位差跟踪精度,从而进一步影响分布式系统的相参性能。
4 相位闭环跟踪算法
本文提出了一种基于回波信噪比动态估计的相参差闭环跟踪算法,该方法不依赖目标的先验回波信号数据,实现分布式全相参雷达的相位闭环跟踪。
由分布式全相参雷达方程可知:

式中,N 为单元雷达个数;Pt为单元雷达发射功率;G 为单元雷达天线增益;λ为工作波长;σ为目标散射截面积;R 为目标相对距离;L 为系统和空间损耗。
由式(16)可知,在单元雷达数目、发射功率、天线增益、工作波长、目标散射截面积、系统和空间损耗一定的条件下,回波信噪比与目标相对距离R 的4次方成反比,根据雷达输出的目标相对距离,可以实时计算出当前状态下分布式雷达全相参工作的回波信噪比估计值,定义合成效率为

式中:S/N 是发射相参工作模式下对相参合成的回波信号进行采集并实时计算的输出信噪比。
设定最低合成效率指标ηmin,在相参性能监测模块实时计算合成效率,通过与最低合成效率指标ηmin的比较来确定系统的下一步工作状态:当≥ηmin时,表明系统相参性能满足指标要求,则系统循环工作在发射相参工作模式下;而当<ηmin时,表明系统相参性能不满足指标要求,则系统需要重新回到接收相参工作模式进行全相参的引导。
为此,提出了回波信噪比动态估计的相位差闭环跟踪算法:首先,分布式雷达进行接收相参工作,发射正交波形进行相位差跟踪估计,此时的相位差跟踪方法是理想的无偏跟踪过程;然后,分布式雷达转入发射相参工作,利用上一步所得的相位差估计值,对各单元雷达发射的相参信号进行相位调整以实现发射相参。同时,在发射相参波形条件下进行相位差估计值更新,此后整个系统循环工作在发射相参工作模式下。在此基础上,在系统的输出端增加相参性能监测模块对系统的相参性能进行监测,当系统全相参合成信噪比改善低于8dB时,系统需要重新回到接收相参工作模式进行全相参引导,实现相位差的闭环跟踪,如图7所示。
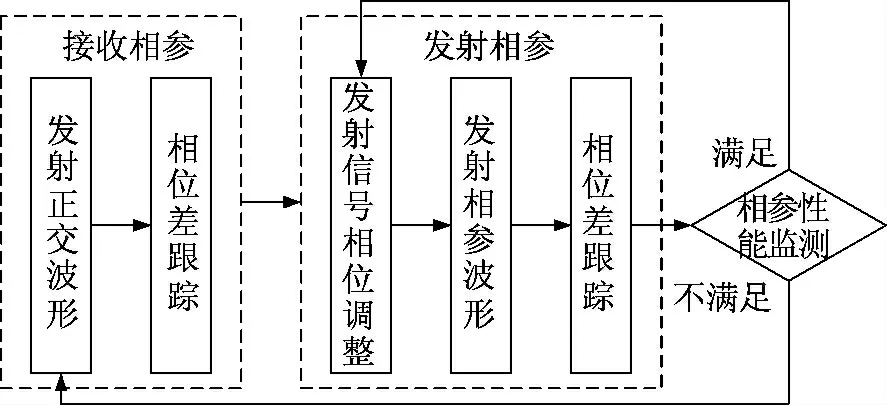
图7 相参差闭环跟踪工作流程
5 结论
本文分析了分布式全相参雷达的理论模型,针对分布式全相参雷达这一新体制雷达的实现所面临的相位差跟踪问题,根据分布式雷达系统的工作特点,分别提出了接收相参、发射相参工作模式下的相位差跟踪环路。通过理论推导可知,在接收相参工作模式下可实现相位差的理想跟踪;而在发射相参工作模式下,各单元雷达的相位同步误差将影响相位差的跟踪精度。最后,提出了一种基于回波信噪比动态估计的相参差闭环跟踪算法,使得系统全相参合成信噪比改善不低于8dB。
[1] 鲁耀兵,张履谦,周萌萌,等.分布式阵列相参合成雷达技术研究[J].系统工程与电子技术,2013,35(8):1657-1662.
[2] 曹哲,柴振海,高红卫,等.分布式阵列相参合成雷达技术研究与试验[J].现代防御技术,2012,40(4):1-11.
[3] 殷丕磊,杨小鹏,曾涛,等.分布式全相参雷达的相位差跟踪技术[J].信号处理,2013,29(3):313-318.
[4] 曾涛,殷丕磊,杨小鹏,等.分布式全相参雷达系统时间与相位同步方案研究[J].雷达学报,2013,2(1):105-110.
猜你喜欢
湖南电力(2022年3期)2022-07-07
现代仪器与医疗(2022年1期)2022-04-19
城市道桥与防洪(2022年1期)2022-02-25
河北工业大学学报(2021年4期)2021-09-23
河北电力技术(2021年2期)2021-07-29
舰船电子对抗(2020年1期)2020-04-27
北京航空航天大学学报(2019年9期)2019-10-26
雷达学报(2017年3期)2018-01-19
制导与引信(2017年3期)2017-11-02
现代防御技术(2017年2期)2017-05-13
