基于小波包分解与DAG-SVM的柱塞泵故障诊断
2015-04-16 07:31:00,,,
液压与气动 2015年12期
, , ,
(第二炮兵工程大学 兵器发射理论与技术国家重点学科实验室, 陕西 西安 710025)
引言
作为液压系统的主要动力元件,液压泵的性能直接影响液压系统的正常工作,其状态检测与故障诊断是液压系统检测诊断的重要环节。柱塞泵具有额定压力高、功率大、效率高、体积小等诸多特点,但也存在自吸性差、结构复杂、油液精度要求高、维护成本大等缺点,常见故障有泵发热、配流盘磨损、滑靴与斜盘磨损、松靴以及输出流量不足等[1]。
针对柱塞泵故障诊断状态特征不明显的问题,实验模拟了柱塞泵故障,通过采集各状态下泵端面中央的振动信号, 利用小波包分解提取各频带能量以构建特征向量。有向无环图支持向量机(Directed Acyclic Graph SVM,DAG-SVM)是一种新的多类分类方法,采用最小超球体类包含作为层次分类依据,相比已有的分类方法有更高的分类精度。本研究采用DAG-SVM法[2]构造多分类支持向量机进行故障特征提取与故障预测,在此基础上完成了一体化诊断装置的设计验证。
1 SVM基本原理
支持向量机(Support Vector Machine,SVM)是基于统计学习理论中结构风险最小化原则的一种有效的、通用的机器学习方法,能有效克服局部最小问题以及工程实际中的小样本、高维数和非线性等实际难题,它通过建立最优分类超平面作为最终的决策曲面,将不同模式之间的隔离边缘最大化[3,4]。
C类支持向量机(C-Support Vector Machine,C-SVM)是利用支持向量机求解分类问题的最基本分类器,具有较高的识别率,径向基核函数(Radial Basis Function,RBF)能够实现非线性映射,且有两个参数:惩罚因子c和核参数g,是应用最广泛的核函数。本文采用C-SVM模型和RBF核函数构造并求解最优化问题:


构造的决策函数f(x)为:
2 柱塞泵故障诊断方法
采用SVM的柱塞泵故障诊断分为模型训练部分和状态检测部分。首先进行模型训练,利用db5小波包将采集到的柱塞泵正常与故障信号分别进行三层分解,选择相应的频带能量以构造特征向量,并输入SVM进行训练,找到正常与故障状态的最优分类超平面;在状态检测中,将待测信号提取特征后输入到训练好的SVM,根据训练后确定的最优分类超平面对测试数据进行分类。其一般步骤如图1所示。
实际应用中往往需要对多种状态进行分类,而传统SVM只能进行二值分类处理,可对多个二分类器进行组合来构造多分类SVM。本研究采用DAG-SVM法构造多分类SVM。DAG-SVM将决策树与SVM相结合,k个类别只需要构造k-1个SVM,构造样式灵活,能有效的融入经验知识,对关联性故障具有较好的适应能力,通过对分类结构的调整,能体现不同类别重要性与级别的差异。该方法具有特征向量选取工作量小、模型结构调整方便、决策速度快等特点。对于四分类问题,常见的结构形式如图2所示。
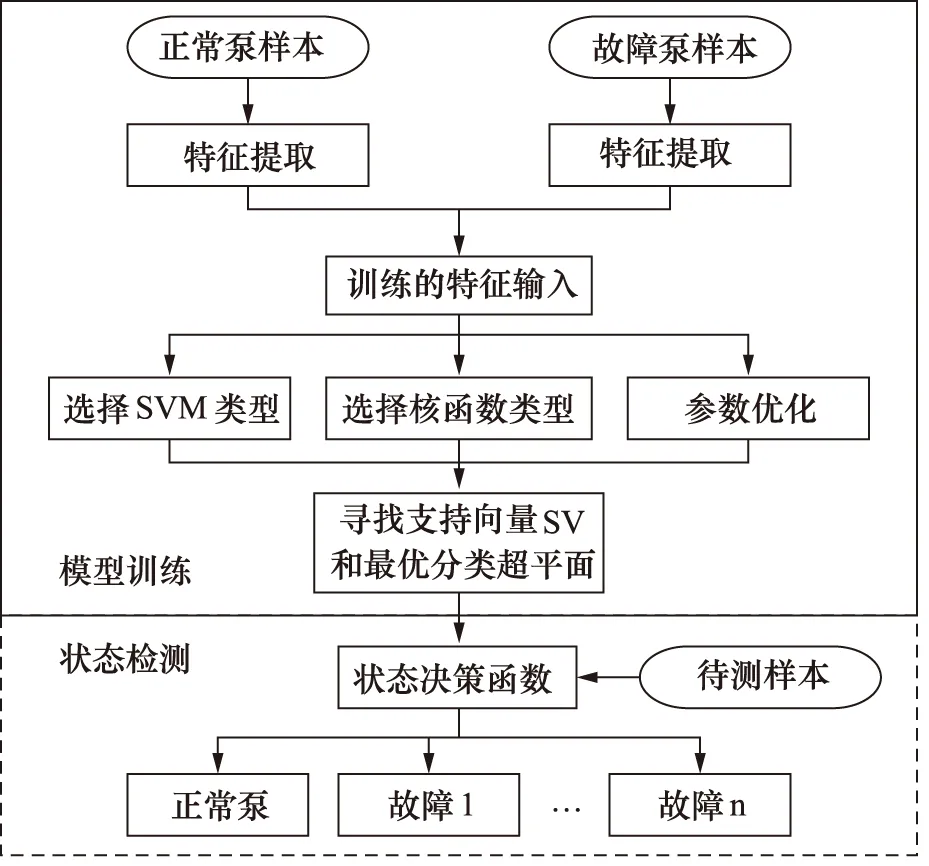
图1 柱塞泵故障诊断步骤
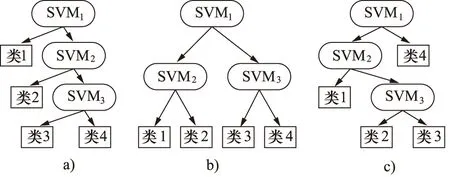
图2 四分类问题的常见DAG-SVM结构
2.1 多分类SVM的构造
在试验中模拟了四大类共九种故障,加上柱塞泵正常,共十种状态。根据经验知识和故障之间的关联性对二叉决策树的结构进行调整,设计的DAG-SVM结构如图3所示。
在决策过程中,首先判断柱塞泵是否正常,若不正常则进行相应的故障识别。设计二叉决策树时应使各故障被识别后所经过的SVM尽可能少,以提高该故障诊断的可信度。根据相似故障振动信号的相似性,先进行大的分类,然后再通过同类型故障振动信号细微处的差异,进行同一类故障下各状态的细分。在故障特征不明显时,该方法能首先确定样本所属的类别,对故障进行大致定位,得到模糊诊断结果,然后再根据该类别下各状态的概率,给出精确诊断结论,因此更符合工程实际应用。

图3 柱塞泵故障诊断DAG-SVM结构
2.2 SVM多状态的分层识别
将选择的特征向量输入SVM中进行训练,并对SVM的惩罚因子c和核参数g进行优化,基本思路为:在一定数值范围内,将c和g按照等步长进行搜索,每次都将样本集随机分为训练集和验证集,以得到的分类准确率作为该组参数的性能指标。参数粗略选择结果如图4所示。
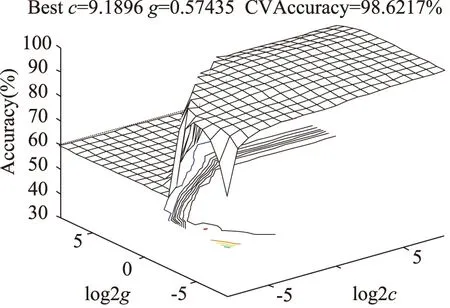
图4 参数粗略选择结果3D视图
从图4中可以看出,若仅考虑SVM对样本集的分类准确率,则最佳参数组合(c,g)=(9.1896,0.57435),对应的准确率Acc=98.62%。但应用实践中在参数的确定过程时应尽量使惩罚因子c取值小,过高的c会使SVM出现过学习状态,出现仅在当前的样本下具有较高的分类准确率,而实际应用中分类准确率很低的现象,致使SVM的泛化能力降低。令已获取的最佳c为c′,大量试验表明,在保证分类准确率和提高模型泛化能力的前提下,根据准确率下降不超过5%~10%、c较c′减小超过50%的原则选择的最佳参数组合集中在直线log=logc-logc′附近[5,6]。最终模型选定(c,g)=(0.0068,0.0118),该组参数下SVM的分类准确率Acc=94.41%,且模型的泛化能力较高。
在模型诊断的过程中,根据二叉决策树进行分类故障诊断,采用模糊诊断和精确诊断相结合的诊断方式,使诊断模型进一步贴近工程实际,对于出现的复合故障也具有一定的诊断能力。柱塞泵检测诊断系统显示面板如图5所示。
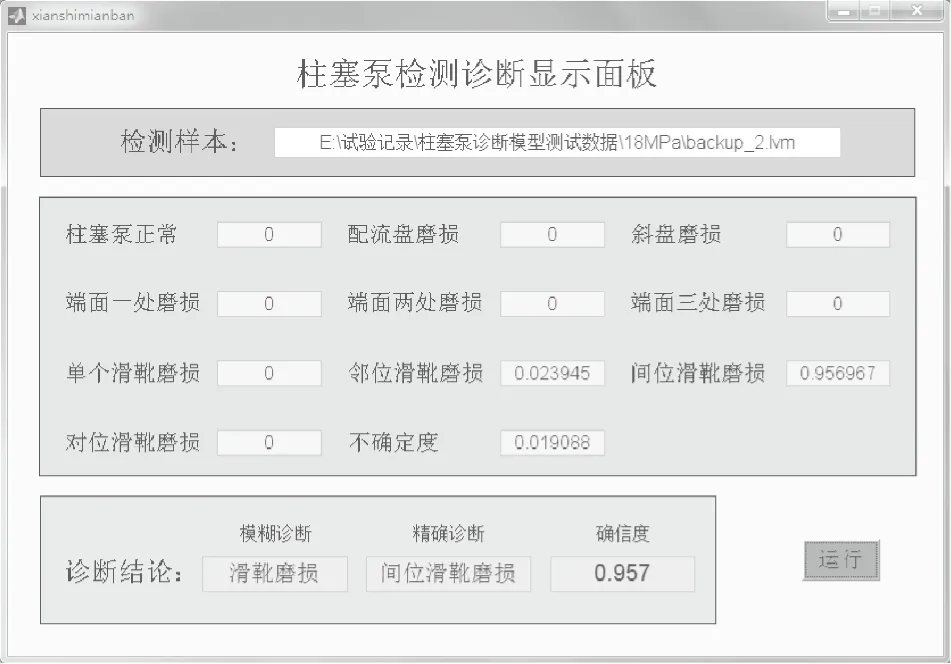
图5 柱塞泵检测诊断系统显示面板
3 一体化诊断装置设计
3.1 总体结构
一体化诊断装置的原理框图如图6所示。
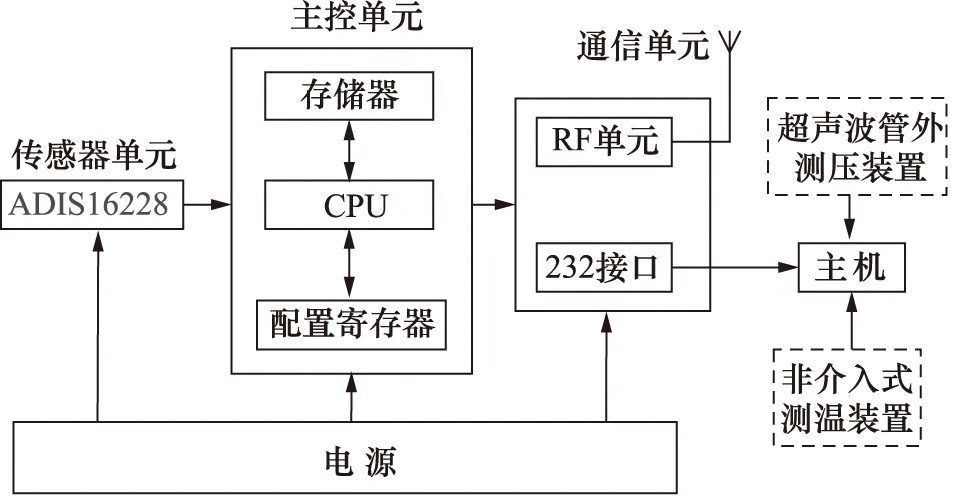
图6 一体化诊断装置原理框图
该装置主要包括传感器单元、主控单元以及通信单元三大部分,传感器单元负责敏感泵体三轴的振动信号,主控单元的CPU通过A/D模块对振动信号进行采样,通过通信单元的RF通信模块进行无线传输,或者采用串口总线有线传输至上位主机,由计算机完成对振动信号的分析与处理,并将最终的诊断结果进行显示。此外,由于压力和油温也会改变泵体的振动特性,从而影响模型参数,因此主机也能够接收油温与压力测试装置的测试数据,并依此对模型进行调整以提高诊断精度,这部分研究内容将另行发文探讨。
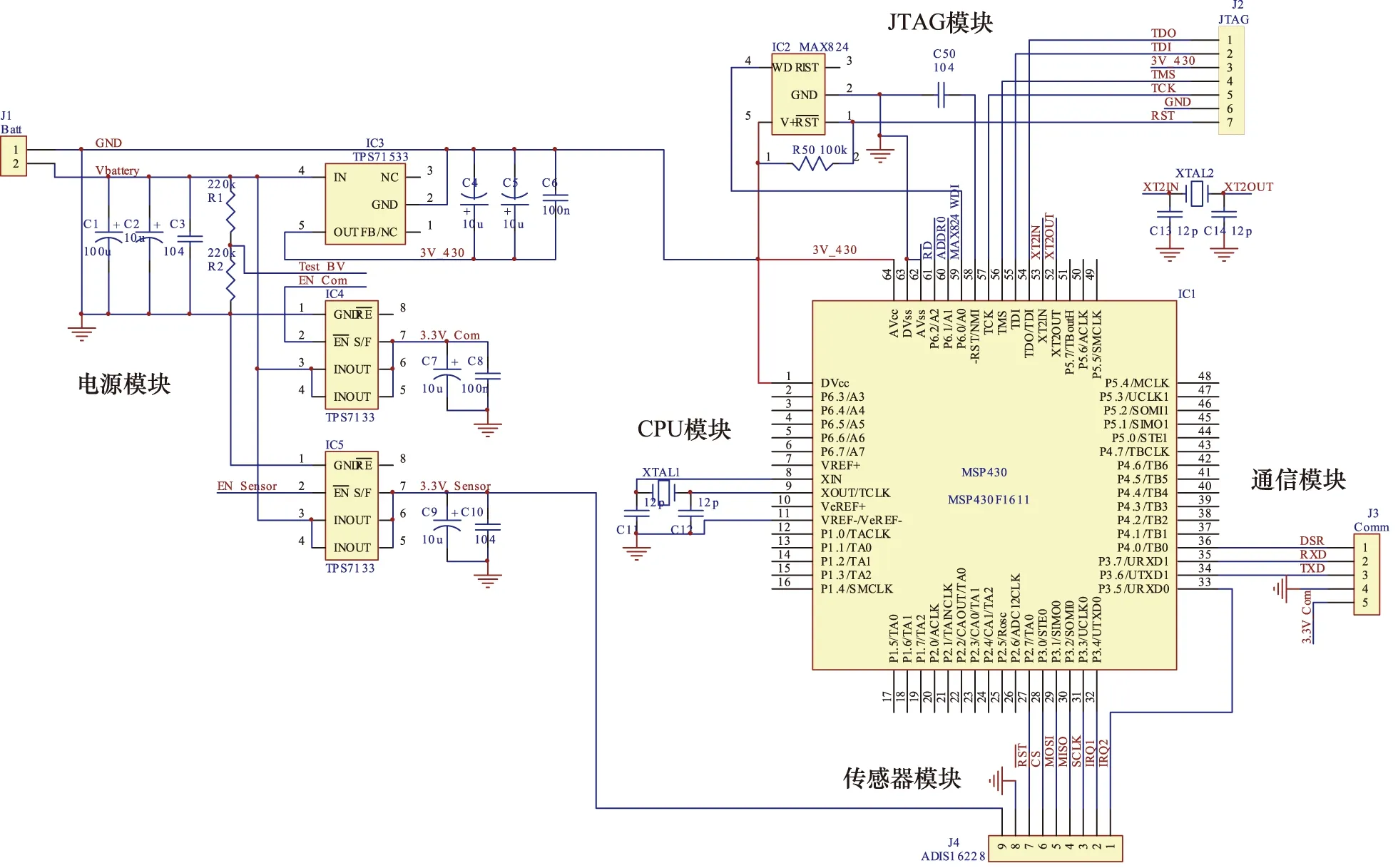
图7 采集转发电路
3.2 主要器件选型
(1) 传感器单元。采用ADIS16228加速度传感器作为振动信号的敏感器件,该型传感器平坦频段的频率响应可达5 kHz,其加速度动态响应范围为±18 g,具有0 g至1 g/5 g/10 g/20 g四档可供选择,满足液压泵振动信号的检测要求。ADIS16228外形尺寸较小,仅为15 mm×24 mm×15 mm,在狭小空间上方便安装,其温度适用范围为-40 ℃至+125 ℃,满足实际应用要求;
(2) 主控单元。CPU采用MSP430F1611型单片机,该系列单片机具有功耗低、处理能力强、片内外设多等特点,特别适用于装备的现场、在线检测诊断,有利于在操作空间受限的场合使用,提高了诊断装置的待机时间。
3.3 电路设计
采集转发板由CPU模块、JTAG模块、传感器模块、通信模块和电源模块等部分组成。采集转发电路如图7所示。
3.4 测试流程
利用一体化诊断装置对液压泵振动信号进行采集、预处理和传输,工作流程如图8所示。首先完成对装置的初始化、自检等步骤,然后测量泵体三轴的振动信号,以采样频率2000 Hz、时长1 s的三轴振动信号为一组,对数据进行组帧,共采样5组振动信号。通过通信单元将振动数据传输至上位主机,由主机实现对数据的分析和液压泵故障的诊断。
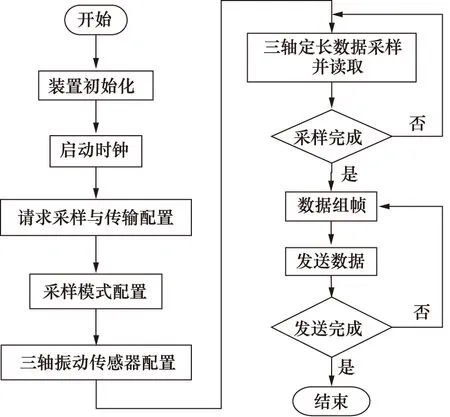
图8 一体化诊断装置工作流程图
ADIS16228加速度传感器开始工作前,需要对其内部的各类寄存器进行配置,而后才能进行数据的采集与输出。根据试验要求选择实时模式SR0,根据液压泵振动信号的特点,选择传感器的动态范围为±1 g。配置流程如图9所示。
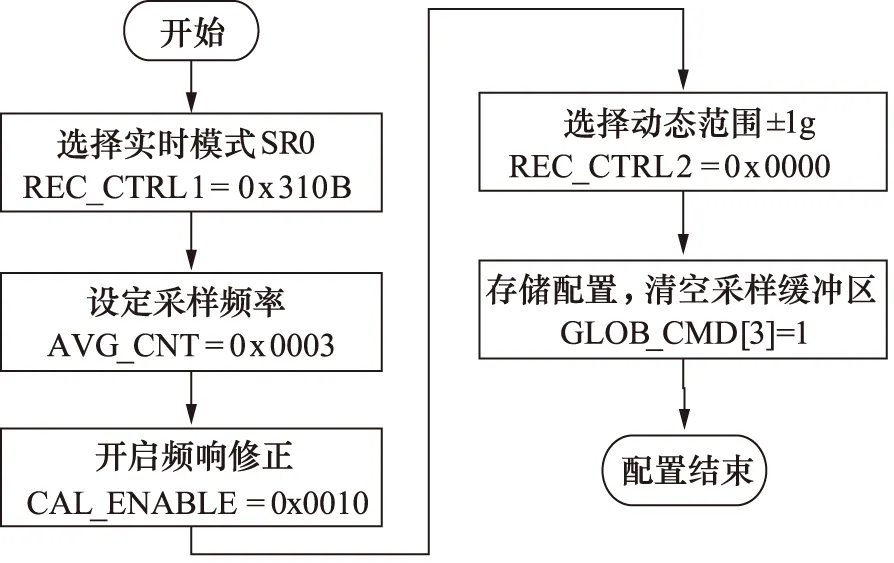
图9 传感器配置流程
4 柱塞泵故障诊断试验验证
试验选用10MCY14-1B型定量柱塞泵,主要由泵体、配流盘、缸体、滑靴及斜盘等部分组成。试验平台所用电动机为Y132M-4型三相异步电动机,其实际工作转速约为1480 r/min,则泵转轴频率约为24.67 Hz,因此柱塞泵的振动基频约为24.67×7≈173 Hz。
4.1 柱塞泵故障模拟
通过查阅相关资料同时结合实际,试验中主要对滑靴、斜盘、缸体端面以及配流盘的磨损进行了模拟。
(1) 滑靴磨损。试验中模拟了单滑靴磨损和双滑靴邻位、间位及对位的磨损。故障模拟实物如图10所示;

图10 滑靴磨损
(2) 斜盘磨损。试验中在斜盘使柱塞缩回的一侧设置了磨损故障,如图11所示。

图11 斜盘磨损
(3) 缸体端面磨损。试验中对端面一处磨损,两处对位磨损以及三处磨损进行了模拟,故障模拟实物如图12所示。

图12 缸体端面磨损
(4) 配流盘磨损,配流盘模拟故障如图13所示。

图13 配流盘磨损
4.2 提取故障特征模型
试验过程中,首先进行故障模型训练:分别利用一体化装置多次采集上述三类模拟故障以及正常状态共10种泵体振动信号,利用多次采集的不同振动信号作为模型的训练样本。以滑靴磨损为例,表1为利用db5小波包对采集的部分滑靴磨损振动信号样本进行三层分解得到的8个频带能量百分比,重构特征向量后输入至SVM进行训练,按此步骤分别提取上文模拟的各类故障的特征向量,完成SVM模型训练过程。

表1 部分滑靴磨损故障样本
4.3 试验验证
以实际装备中的10MCY14-1B型定量柱塞泵为试验对象,选取多台装备中已知故障状态的三个样泵,利用所设计的一体化装置对该测试诊断方法进行试验验证。一体化诊断装置实物和验证试验如图14所示。

图14 一体化诊断装置实物和试验验证
对柱塞泵泵体三轴振动信号进行采集后,通过通信单元将振动数据传输至上位主机,三组样本数据经db5小波包三层分解后,得到各频带能量百分比,三组样本数据的频带能量百分比分别如表2~表4所示。

表2 样本数据(配流盘磨损)
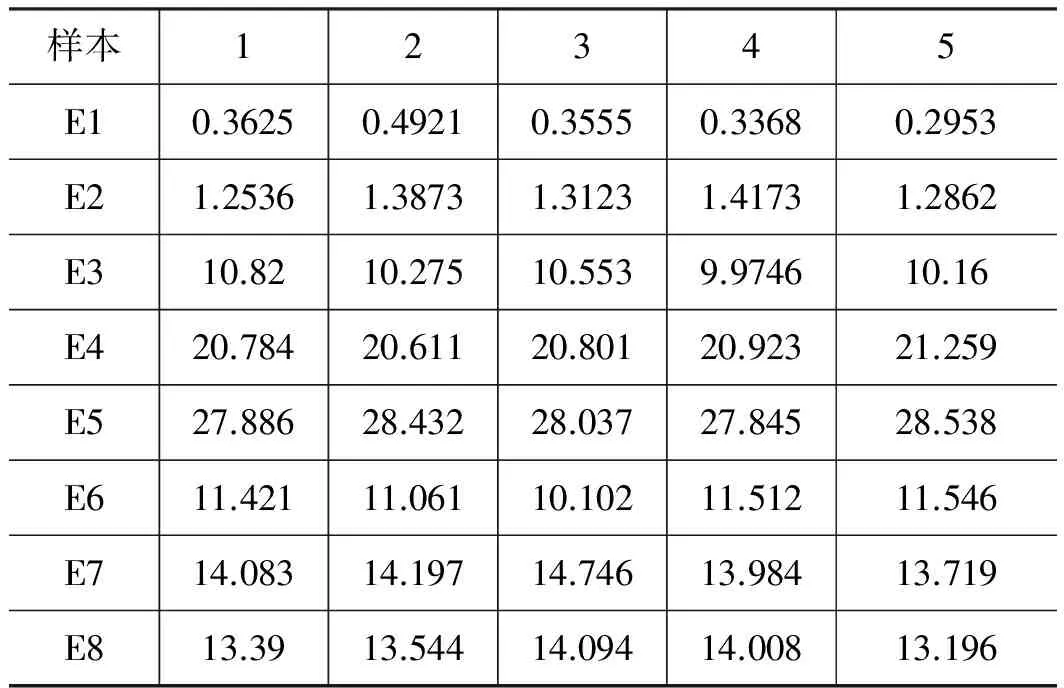
表3 样本数据(斜盘磨损)
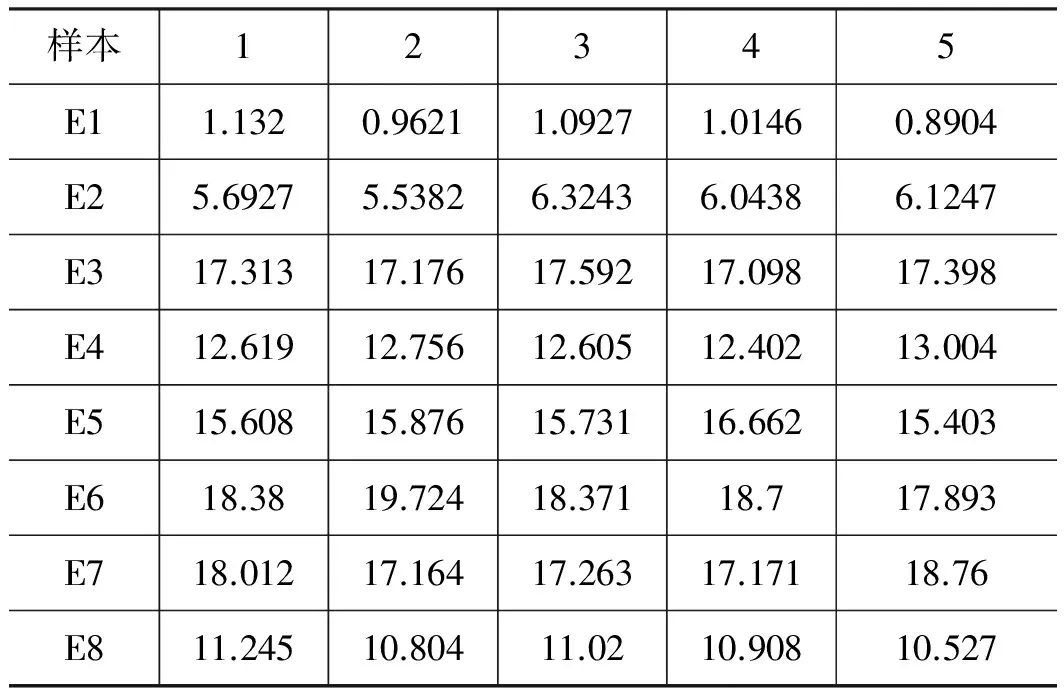
表4 样本数据(缸体端面两处对位磨损)
利用分解后的频带能量重构待测样本的特征向量输入至SVM进行故障模式识别,得到的诊断结论为三个样泵分别处于配流盘磨损状态、斜盘磨损状态、缸体端面两处对位磨损状态,与已知的柱塞泵状态相吻合。试验结果表明,该故障诊断方法能够实现对柱塞泵的准确诊断。
5 结论
通过分析柱塞泵工作状态的振动信号,将决策树与SVM相结合,提出了一种利用DAG-SVM法构造多分类支持向量机的故障诊断方法。采用小波包将振动信号分解为8个频段,重构并提取出特征向量,而后通过所设计的一体化诊断装置利用该故障诊断方法对故障样本进行诊断,诊断结果与已知状态符合。
参考文献:
[1]蔡伟.液压系统非介入式检测技术[M].北京:国防工业出版社,2014.
[2]黄振龙,郑骏,胡文心.基于类间可分性DAG-SVM的文本分类[J].华东师范大学学报(自然科学版),2013,(3):209-218.
[3]N Ristianini等著.支持向量机导论[M].李正国,王猛,曾华军,译.北京:电子工业出版社,2004.
[4]R Jegadees hwaran. Fault Diagnosis of Automobile Hydraulic Brake System Using Statistical Features and Support Vector Machines[J]. Mechanical Systems and Signal Processing, 2015,52(53):436-446.
[5]刘东辉,卞建鹏,付平,刘智青.支持向量机最优参数选择的研究[J].河北科技大学学报,2009,30(1):58-61.
[6]田海雷,李洪儒,许葆华.基于D-S证据理论和支持向量机的液压泵故障诊断技术[J].仪表技术与传感器,2013,(5):81-83.
猜你喜欢
农业工程学报(2022年10期)2022-08-22 07:34:42
装备制造技术(2020年3期)2020-12-25 05:22:12
智富时代(2018年7期)2018-09-03 03:47:26
电子测试(2018年11期)2018-06-26 05:56:02
石油知识(2016年2期)2016-02-28 16:20:21
重庆工商大学学报(自然科学版)(2015年10期)2015-12-28 07:43:58
探测与控制学报(2015年4期)2015-12-15 15:01:06
振动、测试与诊断(2014年5期)2014-03-01 01:14:21
机械与电子(2014年1期)2014-02-28 02:07:31
河南科技(2014年19期)2014-02-27 14:15:25